引入自动驾驶仪时空中交通防撞系统的仿真
2012-07-04 11:29:18敬忠良
电光与控制 2012年7期
顾 博, 肖 刚, 敬忠良
(上海交通大学航空航天学院,上海 200240)
0 引言
空中交通防撞系统(Traffic Collision Avoidance System,TCAS)于20世纪50年代发展成熟,独立于地面的空中交通管制系统而工作。在我国,越来越多的民航飞机装配了TCAS设备。目前,TCAS能够提供垂直防撞功能,由于ADS-B(广播式自相关监视)逐渐成熟,水平防撞功能也将投入应用。
许多学者在TCAS理论研究方面做了大量的工作,文献[1-2]对机载防撞系统技术的基本原理做了较深入的分析;文献[3-5]对TCAS算法进行了深入的研究,提出了多种基于模型的算法,包括单机及多机防撞。
TCAS虽然已经是相对成熟的机载设备,但在其功能的优化等方面依然有发展空间。如RTCA-DO-299[6]的一份报告中提到:在TCAS系统指导飞机避撞过程中可能会遇到一种情况,当TCAS系统发出相同的RA(Resolution Advisory)避撞指示后,切断自动驾驶仪,转由飞行员操纵飞机避撞。不同飞行员的反应各不相同,这样必然对飞机躲避冲突的能力有一定的损害。所以在2009年空客公司针对A380客机的TCAS应用提出加入自动驾驶仪[7],并且通过了EASA(欧洲航空局)的验证和批准,最终使得可能发生的不确定的躲避情况有很大的改善。本文就是在对TCAS轨迹预测算法进行了分析和计算的同时,结合前人经验,在TCAS系统中加入Auto-Pilot(自动驾驶仪)环节,并且对其进行理论研究和仿真论证,使得TCAS系统的可用性和安全性有了一定的提高。
1 预测与防撞
TCAS通过S模式应答机或者ADS-B系统得到附近飞机的位置、高度等信息,计算本机和入侵飞机未来的飞行路线。判断两架飞机是否会相撞是根据其到达最接近点(Closest Point of Approach,CPA)所需时间Tau(Time to the CPA)来决定的。系统流程见图1。
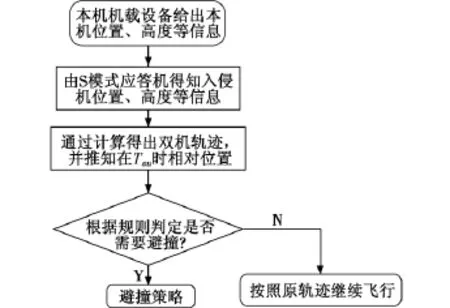
图1 飞机避撞流程图Fig.1 Collision avoidance flow chart of the plane
通过对飞机在Tau时刻位置的预测,可以根据一定的防撞策略对飞机进行指导。通常,飞行器的飞行路线选择如图2所示。
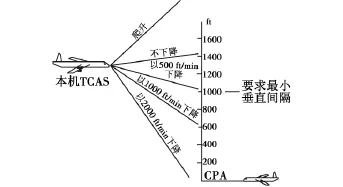
图2 飞机防撞可能选择的路线Fig.2 The routes could be chosen for collision avoidance
每个机动都有一定的延迟,接着同样以0.25g的垂直加速度在垂直方向加速到达目标速度。TCAS将选择其中垂直速率改变最小的一种方式来完成所需的最小间隔。图2中,当RA发出时,装备了TCAS的飞机正以1000 ft/min(1 ft≈0.3048 m)的速率下降,5 种可能机动对应飞机取不同垂直升降率时,在CPA时刻与入侵机之间有5种不同间隔。假设需求的最小垂直间隔是1000 ft,那么图中最小的机动将是“以500 ft/min下降”的机动方式,飞行员将收到相应的语音提示。
面临紧急的加速状况时,因为TCAS的1 Hz的更新频率[8-9]和飞行员的反应与操作迟滞,其预测很有可能延后于实际的情况。而这种延后可能使得RA方式及其躲避强度的选择也延后于实际情况,有时为了缓和该问题,TCAS延缓发出RA,在必要的时候甚至改变RA。如图3中可能把“以500 ft/min下降”方式改为“不下降”方式等等。
这里定义:发出报警但是无实际冲突为虚警(FA),有实际冲突但是没有发出告警为漏警(MD)。那么如果图3情况下RA未改变,就发生了漏警的情况。任何飞行员和飞行器潜在的反应都可能导致之后间隔的减少,对飞行的安全有较大的影响。
2 加入自动驾驶仪
考虑在TCAS系统发出RA后直接通过自动驾驶仪对飞机进行操纵,由于自动驾驶仪无迟滞的特性,可以将系统的安全性大大提高。系统构成如图3所示。
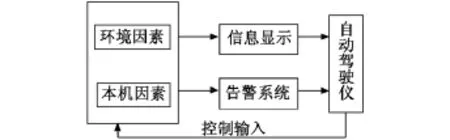
图3 系统加入自动驾驶仪Fig.3 The auto-pilot added into the system
考虑两架飞机最典型的一种情况,本机在15000 ft的高空匀速率直线飞行,一架入侵机从正面飞来,与本机的距离为r,高度差设为h,以的速度下降,速度和本机一样,两机的接近率为,具体情况如图4所示。

图4 避撞过程可能遇到的情况Fig.4 Situations could happened during collision avoidance
可见在τ时刻,两架飞机到达可能最近垂直距离VMD(图中用LVMD表示),如果通过预测,本机发现会有碰撞的危险,就开始发出RA信号,飞行员得到消息之后在τ+ΔT时刻进行机动避撞,ΔT一般情况为5 s[10]。但是入侵机在T1时刻突然改变轨迹平飞,这时如果本机还按原躲避轨迹飞行,则极有可能面临新的危险,原先的RA告警即是虚警,而之后面临的未报警的情况,即是漏警。
在飞行员接收信息到发出行为这段时间ΔT中,可以加入自动驾驶仪代替飞行员决策并机动躲避,可以减少类似的危险发生。
对飞机轨迹进行建模,假设飞机按照原飞行轨迹飞行,其发生危险的概率为

按照躲避轨迹飞行,其发生危险的概率为

式中:τ∈T为两架飞机之间可能的轨迹;H为本机和入侵机可能发生冲突的区域;fτ(τ)为两架飞机可能轨迹的概率密度函数;fx(x)为冲突区域的概率密度函数。两架飞机有关的威胁是关于下降率和接近率的函数,所以对于双机轨迹只与上升率和下降率有关,所以T的积分是对于h·和r·的二次积分,并且根据信息的周期可以得到h·和r·的概率密度函数。当给定了轨迹后,可知可能发生冲突的区域与两架飞机的距离差和高度差有关,所以H与r和h的概率密度函数相关,最终得到以下两种情况。
1)飞机按照原飞行轨迹飞行,发生危险的概率为

2)按照躲避轨迹飞行,其发生危险的概率为

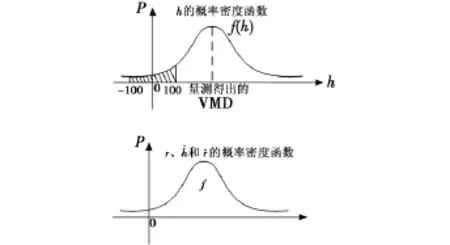
图5 参数概率密度函数图Fig.5 The probability density function of the parameters
那么,若在图4中给定条件:入侵机相对速度为440 kn(约为733 ft/s),入侵机下降率为2500 ft/min,两机在正常情况下发出RA告警时高度差h=1500 ft。在RA发出后,入侵机5 s之后改为平飞,那么根据RTCA1983中对于两架飞机之间态势的描述和文献[6]中给出的数据,可以得出各个参数的标准方差,如表1所示。
根据以上数据对概率进行计算后,可知,当未到达RA报警时间范围时,入侵机一直下降,经计算PN(D)=PA(D)=0.7184,Tau=35 s的时候,如果飞机选择躲避,则概率开始发生变化,所以PA(D)降低,一直到0,而PN(D)不变,当Tau减小到一定时刻,入侵机改为平飞,PN(D)降低,一直到0,而之前躲避的情况下,飞机间发生冲突的可能性增大,PA(D)增大,一直到0.5871。根据计算数据可作图6。
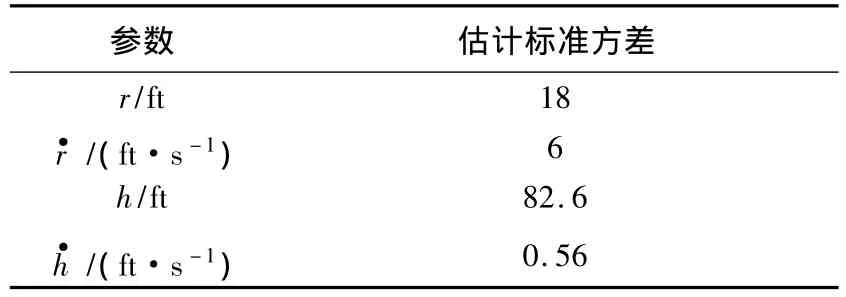
表1 参数标准方差Table 1 Standard deviations of the parameters
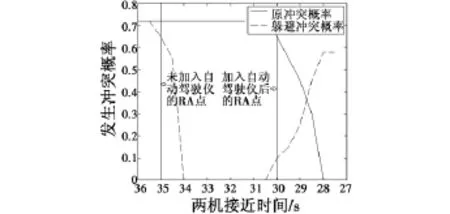
图6 两种情况下发生冲突的概率Fig.6 Probabilities of conflict under two situations
由图6可知,在没有引入自动驾驶仪时,飞机不发生机动躲避的情况下会告警,但是并没有冲突,所以发生虚警,如果按照RA躲避的话,之后又没有检测到入侵机的变化而告警,所以发生漏警。引入自动驾驶仪之后如图可知虚警率和漏警率都会有一定的降低。
3 仿真验证
通过Matlab进行仿真,仿真设置如图7所示,入侵机存在一定的机动概率,一种情况是先平飞,然后突然下降或爬升;另外一种情况是先下降或爬升,然后突然在之前的基础上再机动下降或爬升。两种情况下的爬升下降率都满足正常水平,一般取在[-2500,2500]ft/min,两飞机初始高度差在[-500,500]ft,水平距离取15000 ft。各取一个例子如图7所示。
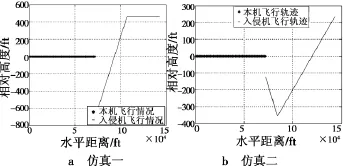
图7 两种仿真情况举例Fig.7 Examples of two simulated situations
进行蒙特卡罗仿真一万次后得到结果。使用了自动驾驶仪后,仿真一虚警率平均下降了4.5%,仿真二漏警率平均下降了0.8%,系统的性能和可靠性得到了一定的提升。
最后对于引言中介绍的RTCA-DO-299中,当引入了自动驾驶仪,飞机的躲避机动将会更加有效率并且能够达到躲避要求。
4 结论
文中介绍了在TCAS系统中引入自动驾驶仪,进行了理论分析和仿真验证,证明该方法能够降低飞行员的工作负荷,提高飞行安全和可靠性。为将来TCAS设备的发展和规划提出了创新的实用方法。
[1]何晓薇.空中交通警戒与防撞系统的主要技术特点[J].中国民航飞行学院学报,2001(3):40-42.
[2]周其焕.交通警戒和避撞系统的技术特点和发展现状[J].航空电子技术,1999(2):10-16,27.
[3]靳学梅,韩松臣,孙樊荣.自由飞行中冲突解脱的线性规划法[J].交通运输工程学报,2003(2):75-79.
[4]夏怡凡,朱允民,马洪,等.空中交通冲突调速最优解决方案[J].四川大学学报:自然科学版,2006(5):955-961.
[5]何桂萍,徐亚军.基于TCASⅡ和ADS-B的组合监视防撞系统研究[J].电光与控制,2011,18(4):61-64.
[6]RTCA.Report:Assessment and recommendations on visual alerts and aural annunciations for TCAS II[S].RTCA-DO-299,RTCA,March 14,2006.
[7]BOTARGUES P.Airbus AP/FD TCAS mode:A new step towards safety improvement[J].Hind Sight,2008(1):25-27.
[8]Aeronautical Radio.Traffic Alert and Collision Avoidance System(TCAS)[S].ARINC,732-2,1993:30-45.
[9]HONEYWELL.TCAS II CAS[S].Honeywell International Inc,2003.
[10]KUCHAR J K.A unified methodology for the evaluation of hazard alerting systems[M].Massachusetts:MIT,1995.
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24 01:09:36
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
中国惯性技术学报(2018年4期)2018-11-08 10:56:42
汽车工程师(2018年1期)2018-07-13 00:47:56
中国公路(2017年13期)2017-02-06 03:16:33
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
电子设计工程(2015年6期)2015-02-27 12:05:09
汽车科技(2014年6期)2014-03-11 17:46:03
计算机与网络(2013年23期)2013-04-16 23:13:30
电脑迷(2012年9期)2012-04-29 02:08:25