面向地面时敏目标跟踪的多传感器智能切换技术
2012-07-04 11:29:30戚薇
电光与控制 2012年7期
戚 薇
(中航航空电子有限公司,北京 100086)
0 引言
为了有效地打击地面时敏目标,相关火力控制技术得到了国内外广泛研究。文献[1]提出了打击时敏目标作战中火力打击时间的建模和计算方法,并将对时敏目标的打击方式分为直接坐标攻击和间接攻击两类;文献[2]研究了时敏目标打击系统作战效能评估和效费分析方法;文献[3]研究了基于效能的时间敏感目标打击策略问题;文献[4]研究了时敏打击指挥控制技术;文献[5]研究了无人作战飞机打击时敏目标的任务规划技术;文献[6]研究了时敏目标的优先级打击顺序方法。但目前对地面时敏目标的跟踪技术还研究得较少,而对地面时敏目标的有效打击,快速准确持续跟踪目标是必须首先解决的问题。因而对地面时敏目标的跟踪技术还需进一步深入研究。
时敏目标具有较好的机动性能,同时可能还存在各种不同程度的遮挡,因此作战平台必须对地面时敏目标具备快速持续跟踪能力。由于各种传感器的作用距离、探测精度及可观测信息不尽相同且各自具有一定的局限性,为了更好地完成时敏目标快速持续跟踪,采用多传感器是一个可行的方案,而这就需要实现不同传感器配置的实时动态切换。
1 问题的提出
传感器切换是在无人机等作战平台已配置好的传感器集合S={s1,s2,…,sn}中(n是跟踪平台初始化配置的传感器总个数),根据当前时敏目标的跟踪需求进行传感器组合的动态选择,实现在使用最少传感器的基础上,完成时敏目标的高精度跟踪。因此,传感器切换问题的形式化描述如下:
1)S={s1,s2,…,sn}是跟踪平台的传感器初始化配置集合;
2)F={f1,f2,…,fm}表示 n 个初始化配置传感器中有m个传感器存在故障,一般有n>m。
根据以上描述,地面时敏目标跟踪时,多传感器切换准则一般要在排除存在故障的备选传感器集合中考虑,根据当前跟踪精度的需求完成传感器选择与调度。假设地面时敏目标在第i时刻的实际位置坐标为(xid,yid),而使用多传感器联合跟踪得到的估计值为(xi,yi)。
不妨假定在当前传感器组合下,时敏目标的跟踪误差定义为

根据式(1)和式(2)以及跟踪误差计算时间的要求,则第i时刻传感器切换目标函数设计为

其中:αij(j=1,2,3)为大于零的加权因子,且有 αi1+αi2+αi3=1;ti为当前传感器组合进行信息融合与跟踪计算所需花费的时间。
显然在对地面时敏目标跟踪的整个过程中,各传感器切换时满足的目标函数可选为

从式(4)可以看出,地面时敏目标跟踪时多传感器选择和切换的准则是在初始配置传感器集合中进行传感器调度与切换,使得式(4)取最小值。在式(4)取最小值的情况下,则意味着在地面时敏目标跟踪全过程中,选择的传感器组合使得在跟踪时敏目标过程中的跟踪误差最小,且在线运算时间最短。
2 多传感器智能切换算法
从式(3)可知,影响当前传感器组合选择和切换的主要因素包括两部分:一是时敏目标的跟踪误差;二是多传感器智能切换的实时运算速度。综合考虑式(3)和式(4),可得多传感器智能切换算法流程,如图1所示。由图1可知,基于多传感器对地面时敏目标的跟踪过程中,多传感器智能切换全过程主要包括如下3个步骤:
1)传感器集合初始配置,根据任务确定跟踪平台配置传感器数量和类型,达到增强对时敏目标的探测与跟踪能力;
2)多传感器的组合分类,充分分析平台中所配置的各传感器具有的数据融合互补性和冗余特点,实现不同传感器组合以应用于时敏目标跟踪的不同阶段;
3)确定当前跟踪的传感器组合,计算每一个传感器组合的目标函数值,在传感器众多可能的组合中选取最佳组合,实现对时敏目标的跟踪。
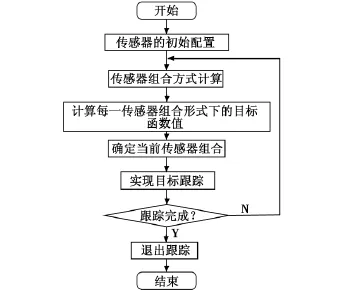
图1 多传感器智能切换算法流程图Fig.1 Flow chart of multi-senser intelligent switching
决定多传感器进行切换的准则主要与所采用的目标跟踪算法有关,本文采用基于当前统计模型的目标跟踪算法。
目标运动采用当前统计模型描述时,则其离散状态方程为[11]

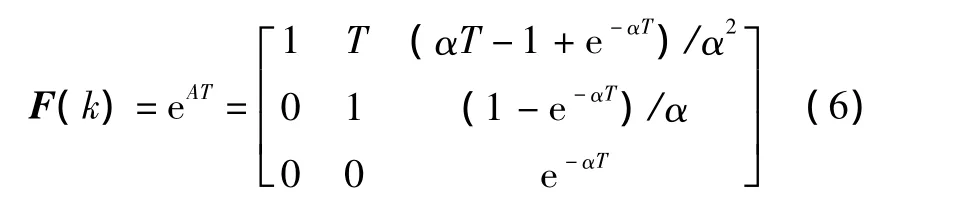
U(k)为状态输入矩阵,形式为
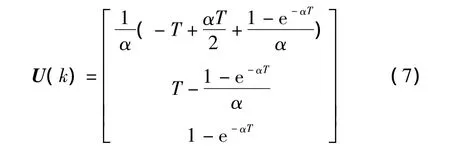
式中:T为采样周期;α为自相关机动时间常数的倒数(机动频率);过程噪声是一零均值、方差为Q(k)的离散白噪声序列。方差Q(k)的算法为


其中,amax和a-max分别为预先给定的最大正负加速度极限值。
目标的观测方程为

式中:v(k)是均值为零而方差为R(k)的高斯观测噪声;H(k)为量测矩阵。基于当前统计模型的跟踪算法采用卡尔曼滤波算法作为跟踪滤波器,来对机动目标进行跟踪。
基于当前统计模型的机动目标跟踪算法的基本过程为[11]

应用基于当前统计模型的机动目标跟踪算法(11),则可以得到每一传感器组合的跟踪精度和在线运算时间,从而根据式(3)和式(4)计算出每一传感器组合的目标函数值,最终完成传感器组合的在线智能切换。
3 仿真研究
仿真假设无人机跟踪平台配置的目标跟踪传感器有:雷达、红外摄像机、电视摄像机、激光测距机等。其中,激光测距机的作用距离假设为10 km左右;红外摄像机有足够高的分辨率,对目标的探测距离为25 km,可以探测隐蔽目标,并实现夜间工作;光电传感器也具有较高的分辨率,且可成动态图像;雷达具有穿透能力,全天时工作,且作用距离远。
在完成传感器集合的初始配置后,就需进行传感器分类组合,确定可供不同场合使用的传感器组合。为了验证本文所研究的多传感器智能切换技术,假设载机与地面目标均做匀速直线运动且二者在具有一定高度差的同一垂直平面内运动,且高度差h=1000 m,无人机的初始状态为s1=10000 m,v1=20 m/s,a1=0.2 m/s2,地面时敏目标的初始状态为 s2=0 m,v2=100 m/s,a2=0.5 m/s2。根据本文所研究的多传感器智能切换技术,传感器组合切换结果如图2所示。
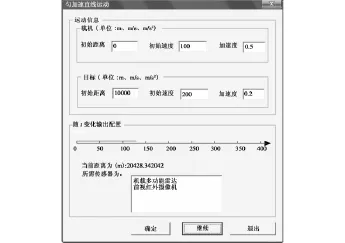
图2 匀加速直线运动时传感器配置输出界面Fig.2 The sensor configuration of uniformly accelerated rectilinear motion
通过图2所示的传感器配置输出界面可以看出,在无人机平台和地面时敏目标相距20428 m时,当前的传感器组合为雷达和红外摄像机。因此,随着传感器平台与地面目标之间距离的变化,总能在所配置的传感器集合中进行各传感器组合的动态在线切换,并输出当前最优传感器组合,这表明所研究的多传感器智能切换算法的有效性。
4 结论
为了实现地面时敏目标的高精度跟踪,研究了一种多传感组合的智能切换方案。根据作战任务的需求和当前所能提供的传感器集合,对跟踪平台中多传感器集合进行初始配置。采用当前统计模型的目标跟踪算法,给出考虑跟踪精度和在线运算时间多传感器组合智能切换的目标函数。通过计算每一传感器分类组合的目标函数值,并根据其大小实现多传感器智能切换。通过传感器组合的切换,实现在使用最少传感器的基础上,完成时敏目标的高精度跟踪。最后,通过一个仿真实验验证了本文所提出的面向地面时敏目标跟踪的多传感器智能切换方法的有效性。
[1]赵熠,周经伦,罗鹏程.打击时敏目标作战火力打击时间建模方法及其应用[J].海军工程大学学报,2010,22(6):42-46.
[2]陈军,高晓光,丁琳.时敏打击系统作战效能评估和效费分析[J].系统仿真学报,2007,19(17):4042-4044.
[3]崔乃刚,殷志宏,杨宝奎.基于效能的时间敏感目标打击策略问题研究[J].控制与决策,2008,23(5):563-566.
[4]张开德,赵书斌.时敏打击指挥控制技术初探[J].指挥控制与仿真,2006,28(2):1-5.
[5]孟波波,高晓光,王云辉.无人作战飞机打击时敏目标的任务规划研究[J].计算机工程与应用,2009,45(26):5-7.
[6]金宏,周武,李北林.时敏目标的优先级打击顺序设计[J].指挥控制与仿真,2009,31(5):90-92.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
高中生学习·高二版(2015年12期)2016-01-05 13:08:35
中学英语之友·上(2008年2期)2008-04-01 01:19:30