正态圆分布下的双机吊放声纳扩展方形搜潜建模
2012-07-04 11:29:16罗木生姜青山侯学隆
电光与控制 2012年7期
罗木生, 姜青山, 侯学隆
(海军航空工程学院,a.研究生管理大队;b.指挥系,山东烟台 264001)
0 引言
双机协同反潜,既可以实现快速地对可疑海区进行搜索,且发现目标后便于协同攻击,是直升机协同反潜的重要样式[1]。吊放声纳以其重量轻、携载方便,使用灵活,可根据海区环境选择最佳工作深度,有效作用距离较远等特点,已成为反潜直升机重要搜潜器材之一。
国内外对反潜直升机使用吊放声纳搜潜的研究较多[1-10],也取得了许多重要成果。其中,文献[3-5]采用解析法建模计算了吊放声纳的搜潜概率;文献[6-7]对扩展方形进行了研究,并得出了一些结论。但是,运用解析法建立多机扩展方形搜潜概率模型的相关文献很少。
扩展方形一般运用于目标航向未知时的应召搜潜[11],这种情况下,目标分布具有对称性。常被研究的多机扩展方形阵[6]不具有对称性,搜潜概率偏低。因此,本文以双机使用吊放声纳应召搜潜为例,采用解析法,在建立扩展方形搜索概率计算模型的基础上,提出了双机对称扩展方形搜索法,最后通过仿真计算,对比分析了两种搜索方法。
1 目标位置分布
要计算搜索概率,首先要分析目标的运动与位置变化。应召反潜时,获知的信息一般包括最后接触时的目标位置坐标、坐标精度,可能还有目标航速、航向等。设获知的信息为:目标位于半径Rc的某圆形区内的概率为p1,圆心坐标已知,航速、航向未知。
假定目标位置服从等方差相互独立的二元正态分布[3],即正态圆分布,以圆心为原点、纬度方向为X轴(东为正)、经度方向为Y轴(北为正)建立坐标系,则t0=0时刻的目标位置分布密度函数为[12]

设目标航向、航速分布密度函数分别为fΨ(ψ)、fV(v),则 t时刻目标位置密度函数[12]为

若目标航向服从[0,360]内均匀分布、航速服从参数v0的瑞利分布,则目标位置密度函数为[12]

2 吊放声纳搜索概率计算模型
吊放声纳搜潜为离散形式[11],所以,搜索概率的计算分为两个步骤:首先计算单次探测的概率,然后计算整个搜潜行动的任务搜索概率。
2.1 单次探测概率
吊放声纳探测一次的区域为:以探测点为圆心,有效作用距离为半径的圆;故探测概率为目标位置分布函数在该区域内的积分。那么,吊放声纳探测时刻为t、到坐标原点距离为r'时的探测概率为[3]
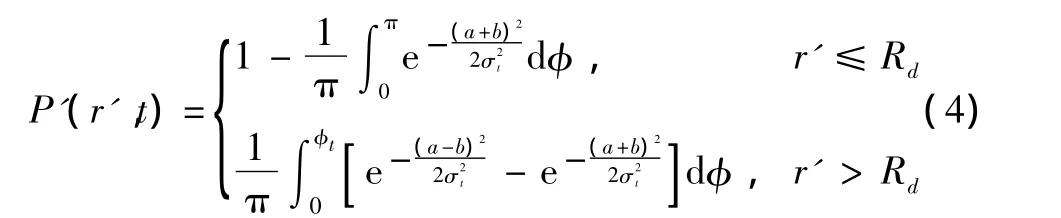
式(4)是独立探测一次的发现概率,没有考虑各次探测之间的影响。若假定已探测且没发现目标的区域不会有目标出现,忽略探测重叠区域,则ti时刻进行第i次探测的探测概率为

2.2 单次探测概率的修正
实际上,已探测区内不出现目标的面积会随着时间的推移而逐渐衰减,由于吊放声纳探测区为圆形,也就是每个已探测区圆的半径会衰减直至为0。衰减的程度由目标运动速度与衰减时间决定,则第i次探测时,第j(j≤i)次探测区的半径衰减为
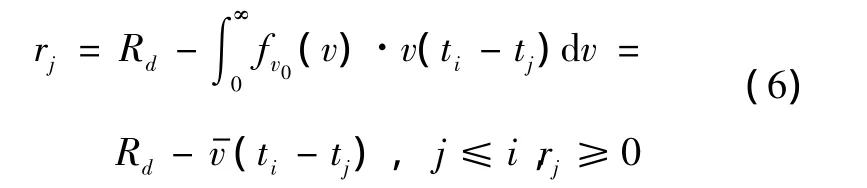
如果目标航速服从参数 v0的瑞利分布,则=。
文献[3]在假定已探测区的探测概率不随时间变化的前提下,引入概率衰减因子β,给出了第i次的探测概率计算公式

2.3 任务搜索概率
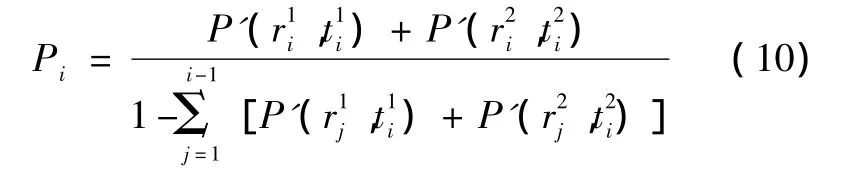
反潜直升机执行搜索任务时,设总共使用吊放声纳探测n次,则该任务下总的发现概率,即任务搜索概率为[3]

第n次探测时第一次发现目标的概率为[12]

3 双机吊放声纳扩展方形搜索
使用吊放声纳搜潜时,执行不同的任务所采用的搜索方法也不同。当执行应召反潜时,吊放声纳搜索方法主要有扇形搜索、扩展方形搜索、螺旋线搜索等[1]。当目标航向未知时,一般从后两种方法中选择。直升机数量一般为单机或多机,为提高搜潜效能,常常采用多机协同搜索。本文重点分析双机扩展方形搜索,其他搜索样式的分析方法类似。
3.1 双机扩展方形搜索
双机扩展方形搜索方法如图1所示,相关研究文献较多[6-7],各悬停点的坐标计算模型可参考文献[6]。为简化分析,同样忽略探测重叠区域,并假设双机开始第i次探测的时刻相同=ti,则双机第 i(i=1,2,…,n)次探测概率为
相邻两次探测时间间隔取决于直升机在两探测点之间机动的时间、一次收放吊放声纳与听测的时间。机动时间受风向、两点间距、直升机飞行速度等因素的影响,计算较为复杂,这里简化处理为间距与直升机平均飞行速度的比值。当确定吊放声纳工作深度后,收放与听测的时间一般为定值。所以,第i次探测的时刻为

式中:Td为首次听测距t0的时间;κ为相邻探测点的间距系数,一般取1.2~1.8;Vhel为直升机平均飞行速度;Hw为吊放声纳工作深度;Vdrag为平均吊放速度;Tlis为单次听测时间。
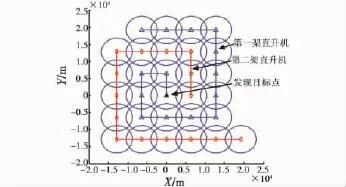
图1 双机扩展方形搜索示意图Fig.1 Two helicopters extended squared search
3.2 双机对称扩展方形搜索
由于目标位置散布具有对称性,而上述扩展方形搜索方法缺乏对称性,将导致探测概率偏低,因而提出如图2所示的搜索方法,暂称为双机对称扩展方形搜索法。双机各次探测概率的计算公式与上相同,只是探测时悬停点的坐标发生了变化。
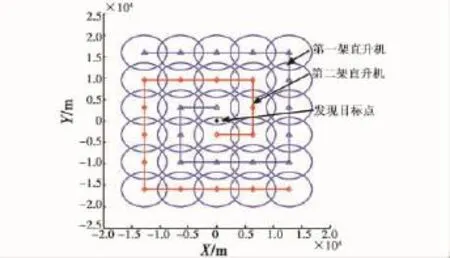
图2 双机对称扩展方形搜索示意图Fig.2 Two helicopters symmetrical extended squared search
3.3 双机搜索使用决策
反潜直升机的任务时间都是有限的,即探测次数的最大值一般是确定的。根据上述模型,可计算出不同探测次数下的搜索面积、搜潜概率与所需的搜索时间。依据这些参数,就可以根据战场态势和任务要求做出决策,如:选择搜索方法、确定探潜次数等。
4 仿真计算与分析
设t0=0时刻获知目标位于半径Rc为1 km的圆形区域内的概率p1为0.95;直升机10 min后起飞,平均飞行速度Vhel为220 km/h;吊放声纳探测半径Rd为5 km;工作深度Hw为水下150 m;κ取1.6;平均吊放速度Vdrag为3 m/s,Tlis为6 min;第一次探测时距 t0的时间Td为30 min;目标速度分布参数v0为6 kn或20 kn(1 kn=1.852 km/h)。不同探测次数下,双机搜潜概率仿真结果如图3与表1所示。
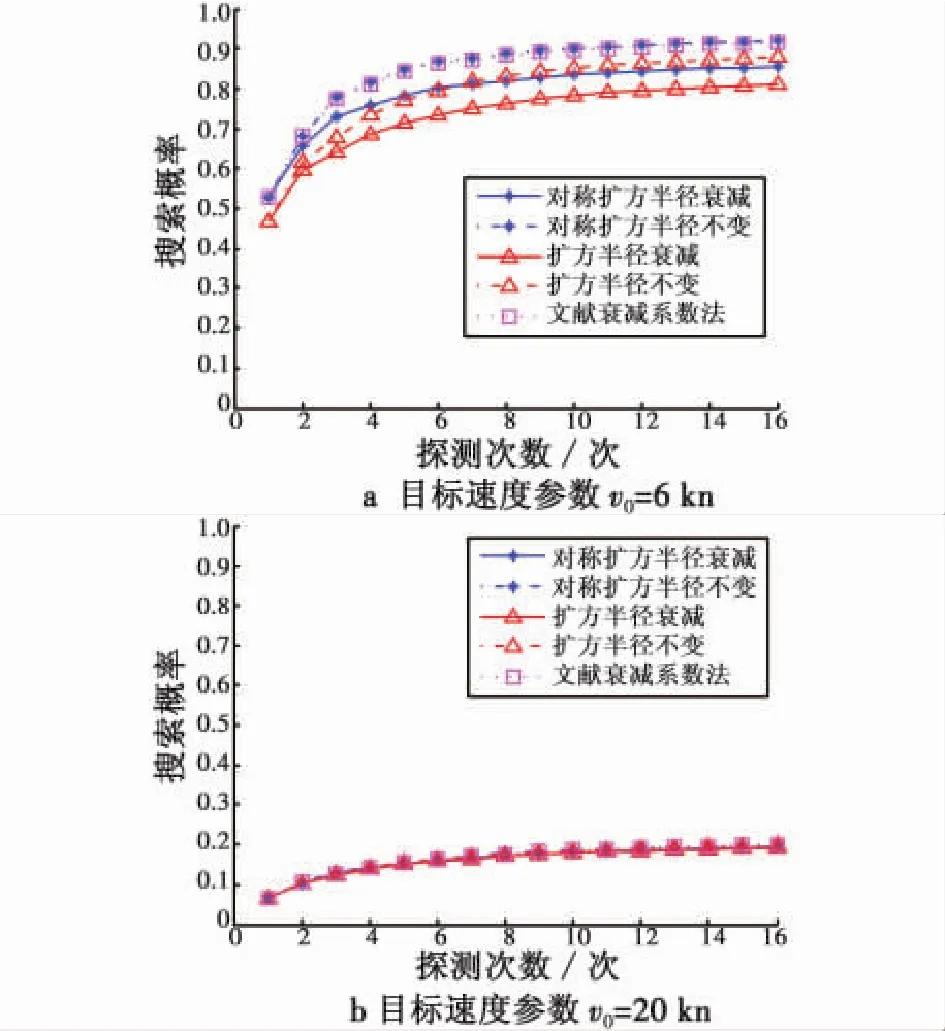
图3 不同探测次数下的任务搜索概率Fig.3 Search probalility with different detecting times
由图3a可得,当目标速度分布参数v0=6 kn时,有如下结果。
1)对称扩展方形搜索概率明显高于扩展方形。考虑已探测区半径衰减时,前者高出后者平均约8.2%;而不考虑半径衰减时,平均高出约7.6%。改变仿真参数发现,Td越小、Rd越大、v0越小,高出值越大,即对称扩展方形的优势越明显。
2)不考虑已探测区半径衰减时,搜索概率都高于考虑衰减时的。因为随着时间的推移,目标有可能会进入已探测区。因此,模型中考虑半径衰减使得计算结果更符合实际。
3)探测次数较少时,任务搜索概率随着探测次数的增加有明显提高;而探测次数较大时,增加探测次数对搜索概率的影响不大。这是因为目标散布面积增加,降低了吊放声纳单次探测的发现概率。
4)文献[3]中引入衰减系数计算得出的搜索概率一般较高,与不考虑探测半径衰减相差不大。衰减因子取不同值计算时,得出类似结果,说明引入衰减因子的效果不明显。
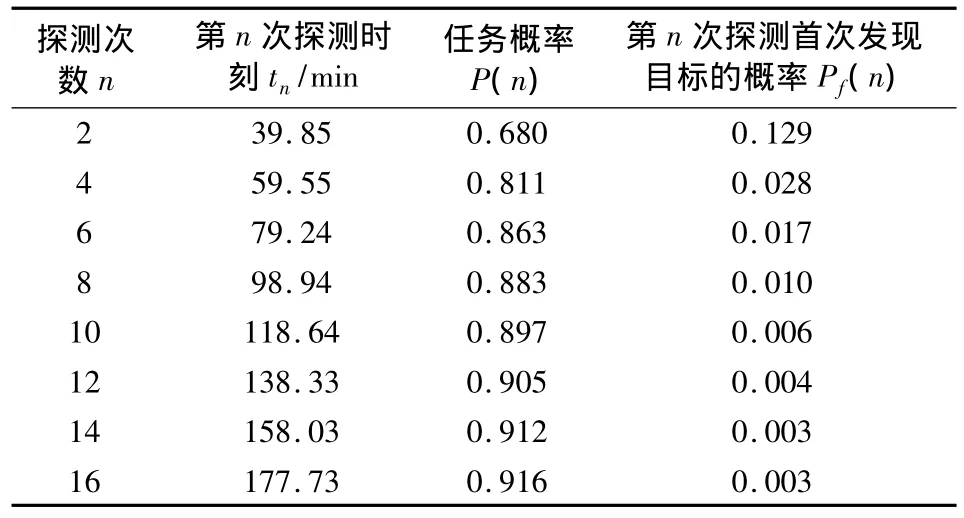
表1 双机对称扩展方形法仿真结果(半径衰减、v0=6 kn)Table 1 Simulation result of symmetrical extended squared search(radius revised,v0is 6 kn)
表1所提供的数据可作为当前参数下指挥决策的依据:1)如果要求搜潜概率达到0.9,则至少应搜索10次,直升机留空时间至少为118 min(未考虑返程与油料余量),如果要求搜潜概率为0.95,则不能采用此搜索方法;2)首次发现目标概率随着探测次数的增加迅速减小,当探测次数超过10次时,Pf(n)已很小了,则继续搜索对搜索概率的影响很小,因而可设置一个阈值,当Pf(n)小于该值时,则终止搜索;
在目标速度分布参数v0=20 kn时,搜索概率很低,各种模型计算结果相差不大,仿真结果如图3b所示。说明对于高速目标,如核动力潜艇,两种搜索方法都难以满足搜潜要求。
仿真发现,目标初始位置精度对搜索有较大影响。对于v0=6 kn的目标,若要求搜索概率不低于0.75,不同Rc与所需探测次数的变化关系如图4所示。
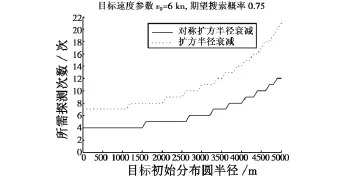
图4 Rc对所需探测次数的影响Fig.4 Effect of Rcto detecting times required
当Rc较小时,需要的探测次数也少;随着Rc的增加,探测次数也急剧增加。当前仿真参数下,对称扩展方形所需的探测次数比扩展方形的少3次以上。
5 结束语
对于速度较低的常规潜艇目标,本文提出的对称扩展方形具有比扩展方形更高的搜索概率;当指定搜潜概率时,前者所需的探测次数明显少于后者;表明对称扩展方形具有更高的搜索效能。然而,对于机动速度较高的核潜艇,两种搜索方法的发现概率都较低,难以满足反潜要求,可考虑采用其他搜索方法,或使用声纳浮标进行搜潜。当探测次数达到一定数量时,由于目标散布面积过大,继续探测对搜索概率的影响不大。本文通过修正探测概率计算模型,使得计算结果更符合实际,提高了模型的可信度。作战应用中,将实际参数带入本文的模型,则计算得出的结果对战术决策具有辅助和参考作用。
[1]孙明太.航空反潜战术[M].北京:军事科学出版社,2003.
[2]MARTIN J.Multiplying the effectiveness of helicopter ASW sensors[J].Sea Technology,2006,47(11):33-36.
[3]陈建勇,冷江,于传健.使用吊放声纳的直升机应召搜潜发现概率[J].海军航空工程学院学报,2004,19(5):559-563.
[4]孙明太,赵绪明.解析法和模拟法在吊放声纳搜潜效能计算中的应用分析[J].海军航空工程学院青岛分院学报,2004,27(3):8-14.
[5]赵绪明,孙明太.吊放声纳搜索效率模型探讨[J].电光与控制,2005,12(2):37-41.
[6]吴芳,杨日杰.多机吊放声纳应召搜潜建模与仿真[J].航空学报,2009,30(10):1948-1953.
[7]孙明太,王涛,赵绪明.反潜直升机吊声搜潜效能的建模仿真[J].火力指挥与控制,2005,30(6):33-36.
[8]吴铭.多机吊放声纳检查搜潜建模与仿真研究[J].计算机工程与设计,2010,31(3):676-679.
[9]吴福初,王磊,刘卫东.反潜直升机吊放声纳搜潜效能[J].火力与指挥控制,2010,35(11):72-75.
[10]白晶,韩亮.舰载直升机吊声的搜潜方法探讨[J].北京航天航空大学学报,2007,33(3):282-285.
[11]孙明太.航空反潜概论[M].北京:国防工业出版社,1998.
[12]TRACEY P A.Search priorities for a target probability area[D].Monterey,CA,USA:NavalPostgraduateSchool,1980.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
电子测试(2018年14期)2018-09-26 06:04:12
铁道通信信号(2018年7期)2018-08-29 01:17:08
无人机(2017年10期)2017-07-06 03:04:38
制造技术与机床(2017年4期)2017-06-22 11:17:56