
帆板控制系统的设计与实现
2012-07-04 09:25郑扬冰
制造业自动化 2012年6期
郑扬冰,薛 晓
ZHENG Yang-bing1, XUE Xiao2,3
(1. 中国矿业大学,北京100083;2. 中国地质大学,武汉 430074;3. 南阳理工学院,南阳 473004)
0 引言
2011年全国大学生电子设计大赛F组题目要求设计并制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角θ,如图1所示。

图1 帆板控制系统示意图
1 硬件设计方案及测量原理
结合题目要求和实施的可行性,系统硬件采用ATMEGA16为主控制器,三轴加速度传感器A7260测量角度,Nokia5110液晶显示,BTS7960驱动电机风扇转动和CPU电源直流风扇提供风力。
采用ATMEGA16通过实时检测与转换加速度模块A7260的点位变化,根据公式换算为对应帆板角度的变化并在液晶上显示。通过4×4键盘的设定来改变单片机发给风扇的PWM值以调节电机驱动模块,控制电机转速进而改变风扇风力大小,以达到改变帆板角度的目的,同时在液晶上实时显示出来。系统硬件设计方案如图2所示。
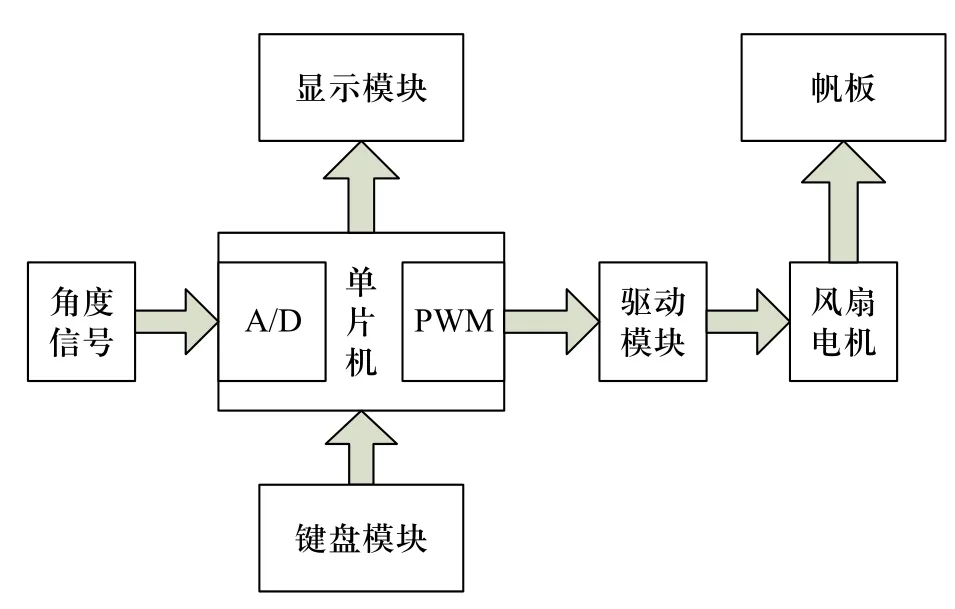
图2 系统硬件框图
1.1 传感器测量原理
如图3所示,三轴加速度传感器A7260能够检测X、Y、Z三个轴向上的电位变化ΔV,转换成对应的角度变化△θ,参考基准电压和基准角度,即可算出对应角度。传感器内部能自动进行信号调理、单极滤波以及温度补偿,具有很高的灵敏度,且功耗较低,费用低廉。

图3 加速度传感器
测试中帆板角度测量原理如图4所示。
加速度传感器A7260测量三轴向上的加速度变化,在X轴方向上的重力加速度分量Ax=gsinθ,当0g时基准电压1.65V,当改变为1g时,电压变为0.8V,改变量△=0.8V,当帆板位于某一角度 θ时其电压值为x,故sinθ=(1.65-x)/ 0.8,即θ=arcsin(1.65-x)/ 0.8为所求。
1.2 风扇控制电路的设计
风扇控制电路的关键在于PWM信号的产生以及PWM信号与角度之间关系。ATmega16内部的T/C1有较强的匹配功能,其相频修正十分适合电机的控制,根据题目要求只需ICR1=1024即10位即可满足要求。根据公式:频率f=OCR1A/ICR1,改变PWM的占空比,即可实现改变角度的目的。
同时,为使测量结果更稳定,系统采用风道设计,减小了风扇气流的散失,使风力更集中,帆板抖动减小,保证了系统精度。

图4 帆板角度测量原理
2 软件设计方案
软件程序设计是基于A/D数据实时准确的采集,同时也要对键盘进行实时检测。由于系统需要设定角度值,所以采用了外部中断,在设定的过程中数据采集暂时中断。系统程序流程如图5所示。
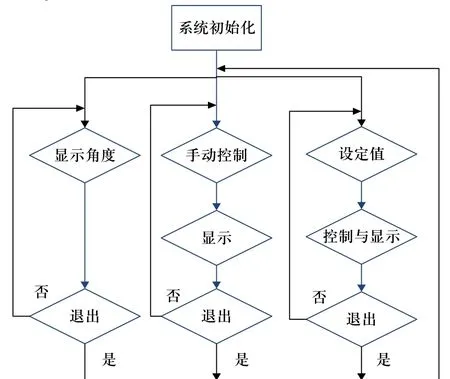
图5 程序流程图
加入中断程序(一部分即可)。
3 测试方案及结果
1)测试数据完整性
根据实际帆板所处的位置,用量角器测量其所处角度,并且多次读取角度值取出现概率最大值,并记录在表格内。
当d=10cm时,θ在0-60°范围内变化结果如表1所示。

表1 帆板测试结果(基本要求部分,单位°)
当d=10cm时,θ稳定在45°,要求时间10s,并有声光提示,测试结果如表2所示。
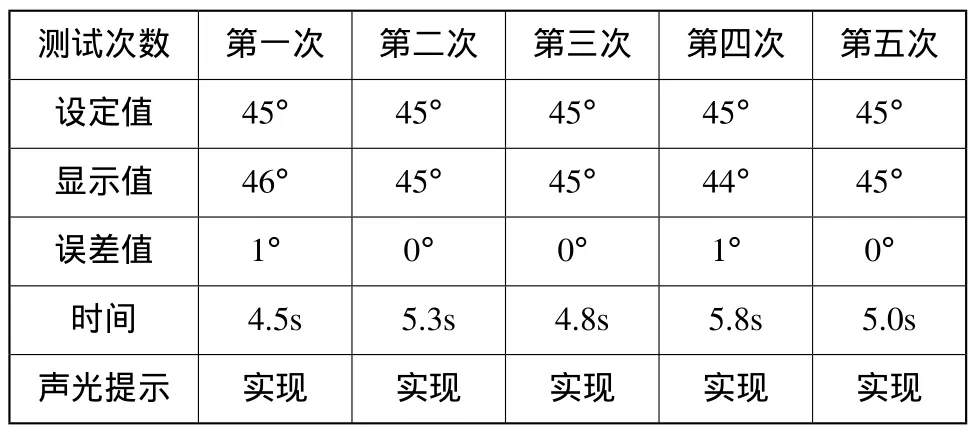
表2 帆板测试结果(基本要求部分)
发挥部分1,当d=10cm时,键盘设定角度在5s内达到,测试结果如表3所示。
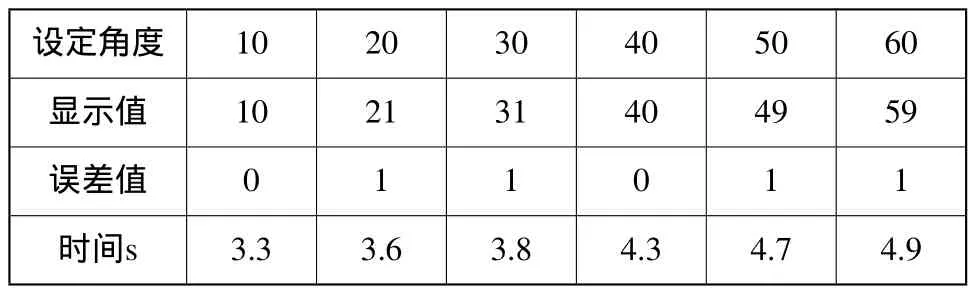
表3 帆板测试结果(发挥部分)
发挥部分2,距离7-15cm改变,键盘设定角度,要求5s内达到,测试结果表4所示。

表4 帆板测试结果(发挥部分)
2)结果分析
由测试结果可看出,当用键盘调节风扇转速快慢,测量帆板升降过程中的角度变化值时,液晶实时显示的角度值和实际值有1°的误差,其中包括读数误差、系统角度采集误差以及电压波动造成的误差。当设定45°值后因为硬件部分采用风道设计,所以帆板的抖动微弱,多次测量值误差仅为1°,并且在远小于10s内即可达到稳定,同时发光二极管点亮,蜂鸣器发出提示音。
在测试发挥部分要求时,键盘设定0-60°任意角度时,系统可以实现在5s内达到设定角度的要求,同时可以看出当角度增大时,所需要的时间增加,但误差仍能控制在1°以内。距离为7-15cm任意变化时,角度的设定也是任意的,由于距离的增加,当角度变大时,所需要的时间有时会超出题目所需要的5s以内,但系统仍能把误差控制在2°以内,精度达到要求。
4 结束语
该控制系统成功的实现了大赛的基本要求和发挥部分题目的要求,获得了2011年全国大学生电子设计大赛全国一等奖的好成绩。
[1] 童诗白, 华程英. 模拟电子技术基础(第四版)[M]. 北京:高等教育出版社, 2009.
[2] 阎石. 数字电子技术基础(第五版)[M]. 北京: 高等教育出版社, 2009.
[3] 张友德, 赵志英, 涂时亮. 单片微型机原理、应用与实践(第五版)[M]. 上海: 复旦大学出版社, 2009.
[4] 彭伟. 单片机C语言程序设计实训100例[M]. 北京: 北京航空航天大学出版社, 2010.
[5] 周立功. 单片机实验与实践[M]. 北京: 北京航空航天出版社, 2004.
[6] 全国大学生电子设计竞赛组委会. 第五届全国大学生电子设计竞赛获奖作品选编(2001)[M]. 北京: 北京理工大学出版社, 2003.
猜你喜欢
中国品牌(2021年6期)2021-08-06
电子制作(2018年17期)2018-09-28
电子制作(2017年6期)2017-12-30
电子制作(2017年12期)2017-08-09
故事大王(2017年4期)2017-05-08
电子制作(2016年21期)2016-05-17
汽车维护与修理(2016年3期)2016-02-28
空间控制技术与应用(2015年4期)2015-06-05
汽车维护与修理(2014年10期)2014-02-28
载人航天(2013年5期)2013-09-19
