
飞思卡尔智能车设计方法探讨
2012-07-02 01:47:52李秀歌娄利峰
长春工程学院学报(自然科学版) 2012年1期
李 慧,李秀歌,娄利峰
(长春工业大学电气与电子工程学院 ,长春130012)
0 引言
“飞思卡尔”杯全国大学生智能汽车竞赛以快速跑完规定赛道为目标,尽可能地提高了车模速度,这不仅要求车模有灵敏的传感器,驱动模块也尤为重要。为了进一步提高车模速度,在设计车模结构时尝试优化机械机构,控制算法等多种方法都没有达到理想的效果,在实验中发现,驱动模块的优化及其控制也尤为重要,可以有效提高车模性能。在经过不断地分析比较后,确定使用BTS7960B芯片方案能够使智能车行驶速度和稳定性得到显著提高[1]。
1 智能车整体设计
系统采用飞思卡尔半导体公司的16位微处理器MC9S12XS128作为核心控制芯片,共设计5个模块。包括传感器检测模块、速度检测模块,舵机转向控制模块,电机驱动模块,电源模块。系统结构框图如图1所示[2]。
在智能车的供电模块中,采用飞思卡尔竞赛主委会提供的7.2V/2 000mAh的Ni-cd蓄电池组直接供电。传感器检测模块负责对赛道进行识别,在电磁组的比赛中,赛道中心铺设通有交流电的导线,传感器通过检测电流所产生的磁场,根据不同磁场的大小转化为电压值并由传感器传出,微处理器MC9S12XS128根据内部A/D模块将采集到的电压值进行处理,经过软件判断后给舵机输出方向控制信号,使智能车沿正确方向行驶。智能车驱动电路负责把控制板输出的速度信号进行功率放大,使其能够驱动电机运转。由此可以看出驱动电路的好坏,在很大程度上决定着智能车的整体性能。

图1 系统结构框图
2 驱动电路设计
直流电机的性能受驱动电路的好坏影响,好的驱动电路可以充分发挥直流电机的性能,从而为整个智能车提供一个性能优越的动力系统。飞思卡尔模型车后轮驱动电机型号为RS-380,工作电压是7.2V,空载电流为0.5A,转速为16 200r/min[3]。在工作电流为3.3A时,电机的转速可以达到14 060r/min,工作效率最大。通过电机驱动模块控制电机两端电压,可以使模型车加速运行,也可对模型车进行制动。可以使用大功率晶体管、全桥或者半桥电路,输出PWM波形实现对电机的控制。
通过查阅大量资料,目前主流RS380-ST直流电机驱动方法主要有3种[4]。
第1种是采用CMOS管搭建的H桥驱动电路。它由2个P型场效应管Q1、Q2与2个N型场效应管Q3、Q4组成,P型管在栅极低电平时导通,高电平时关闭;N型管在栅极高电平时导通,低电平时关闭,场效应管是电压控制型元件,栅极通过的电流几乎为“0”。正因为这个特点,在连接好图2电路后,控制臂1置高电平(U=VCC)、控制臂2置低电平(U=0)时,Q1、Q4关闭,Q2、Q3导通,电机左端低电平,右端高电平,设为电机正转。控制臂1置低电平(U=0)、控制臂2(U=VCC)置高电平时,Q2、Q3关闭,Q1、Q4导通,电机左端高电平,右端低电平,所以电流沿箭头方向流动。设为电机反转。
当控制臂1、2均为低电平时,Q1、Q2导通,Q3、Q4关闭,电机两端均为高电平,电机不转;当控制臂1、2均为高电平时,Q1、Q2关闭,Q3、Q4导通,电机两端均为低电平,电机也不转,所以,此电路有一个优点就是无论制臂状态如何,H桥都不会出现“共态导通”(短路)。电路图如2所示。

图2 H桥电路
采用CMOS管搭建H桥,其特点是内阻小,驱动能力强,最重要的是采用CMOS搭建的H桥不会出现“共态导通”(短路)的现象[5]。
第2种方案是采用MC33886全桥驱动芯片。MC33886是全桥的电机驱动芯片,电流最高5A,发热量较大。因此想使用MC33886作为主动芯片,必须采用多片并联的方法,以减少芯片的发热程度,在选择芯片的时候要特别注意最好选择同批次、同型号的芯片,否则可能会造成芯片的不匹配,导致只有一个正常工作。当用4片并联时更要注意。图3是采用2片MC33886芯片的电机驱动电路[7]。
第3种方法就是采用BTS7960B半桥驱动芯片。使用BTS7960B芯片作为驱动电路需要采用2块BTS7960B半桥驱动芯片组成一个全桥电路,该芯片负载电流可以达到43A,而内阻为16mΩ。BTS7960B是一款针对电机驱动应用的完全集成的大电流半桥芯片。它在一个封装中集成了一个N通道场效应管下桥臂和P通道场效应管上桥臂以及一个控制集成电路。由于上桥臂采用的是P通道开关,对于电荷泵的需求也就不复存在了,因此电磁干扰减至了最小。同时因为该芯片内部的驱动控制集成电路具有逻辑电平输入,使得与微控制器的接口变得很方便,而且该驱动集成电路还具有电流检测诊断、转换率调整、死区时间生成以及过热、过压、欠压、过流和短路保护等功能。BTS7960应用非常简单,只需要向芯片第2引脚输入PWM波就能控制。当系统中只需要单向控制时,只需要让电机一端接地,另一端接BTS7960第4引脚。如果需要电机双向旋转控制,则需要另一片BTS7960共同组成全桥。图为采用BTS7960驱动芯片的电路如图4所示。
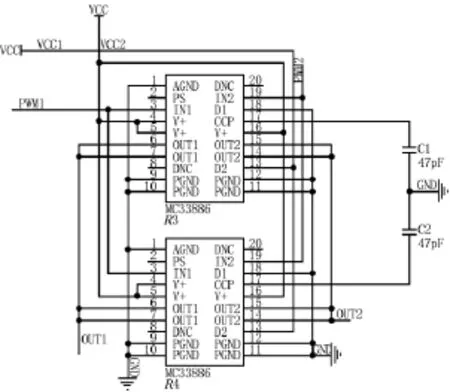
图3 MC33886芯片驱动电路

图4 BTS7960B驱动芯片电路
经过比较分析和实验验证,多片MC33886并联的电路很容易出现多个MC33886发热不均的现象,而且其中的某一片会特别热,影响芯片使用寿命。使用BTS7960搭建的全桥电路内阻远小于MC33886,可以较快地实现智能车的加减速。采用CMOS管搭建的H桥驱动电路,虽然占用空间少,成本较低。但是相比2片BTS7969B搭建的H桥驱动电路驱动能力不强,因此该设计采用BTS7960B芯片的驱动方案,即采用2片BTS7960B半桥驱动芯片电路作为该智能车系统的电机驱动电路。
3 电源模块供电电路设计
电源模块为整个智能车提供电压,车模必须有一个可靠的电源电路给驱动电路的芯片供电。驱动电路的工作电压均为直流,电压有7.2V和5V2种。由于智能车的电池电压是7.2V的,要获得5V电压必须设计7.2V变为5V的电路。直流电压变换的芯片有很多,例如7805三端稳压芯片。在本设计中,考虑到电源的电压7.2V和需要的工作电压5V之间的压差只有2.2V。如果用7805稳压,需要输入和输出电压差要有3V以上,7805不能满足要求。另一种稳压芯片是LM2940,它的输入和输出电压差可以只有1.0V左右。LM2940输出电流1A;输出电流1A时,最小输入输出电压差小于0.8V;最大输入电压26V;工作温度-40℃~+125℃;内含静态电流降低电路、电流限制、过热保护、电池反接和反插入保护电路。经试验电压纹波小,完全可以满足要求,故选用LM2940作为稳压器件,电路图如图5所示。管脚1接电池的正端,同时和地之间接入滤波电容,提高输入电压的稳定性。2脚是地,接电池的负端;3脚是5V输出端和地之间接入的滤波电容,用于减少杂波的输出。

图5 电源稳压电路
4 结语
通过介绍并比较多种驱动电路设计方案,最终确定设计以BTS7960B为驱动芯片的智能车电机驱动电路,该电路具有输入隔离、功率放大、输出短路保护的功能。设计中合理克服其散热问题,通过对驱动模块电路的实际运行测试,证明驱动电路具有很好的信号跟踪放大能力,温度稳定性也达到了设计的要求,是智能车驱动电路设计与应用的可靠方案。
[1]孙晋文.智能运输系统与汽车的智能化技术[J].汽车研究与开发,2000(3):15-16.
[2]徐安,陈耀,方春华.微控制器原理与应用[M].北京:科学出版社,2006:78-80.
[3]薛小龙,王孝明.双速度环在双马达直流调速系统中的应用[J].现代电子技术,2007(8):17-18.
[4]杨欣欣.智能移动机器人导航与控制技术的研究[D].北京:清华大学,1999:27-30.
[5]曹建章,张正阶,李景镇.电磁场与电磁波理论基础[M].北京:科学出版社,2010:56-57.
[6]宗光华.机器人的创意设计与实践[M].北京:北京航空航天大学出版社,2004:47-59.
猜你喜欢
大学物理实验(2023年5期)2023-10-27 13:04:52
山西电子技术(2022年1期)2022-02-28 03:30:02
轨道交通装备与技术(2021年5期)2021-11-19 11:46:46
科技传播(2019年15期)2019-08-22 08:07:44
汽车维修技师(2018年7期)2018-12-07 08:23:44
数字传媒研究(2017年11期)2017-02-05 05:12:33
西部广播电视(2016年16期)2016-11-09 03:37:43
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
河南科技(2014年10期)2014-02-27 14:09:18
