VSAT网络实时拓扑结构与通联分析模型
2012-06-25 07:03王婧婧赵艳秋陈越新
电视技术 2012年9期
王婧婧,赵艳秋,陈越新
(西南电子电信技术研究所,四川 成都 610041)
甚小孔径终端(Very Small Aperture Terminal,VSAT)是卫星通信的一个热点领域,是指一类具有甚小口径天线的小型或微型地球站,与一个中心站或其他小站协同工作,构成 VSAT 网络[1]。
实时拓扑结构与通联分析是网络管理的重要内容[2],是监测网络实时运行状态,维护网络正常运行的重要支撑。本文以通信体制为TDM/MF-TDMA/DAMA(即外向信道采用时分复用,内向信道采用多频时分多址,信道分配方式为按需分配)的星形VSAT网络为研究对象[3],探讨了实时拓扑结构与通联分析在此类VSAT网络中的具体应用。
其中,实时拓扑结构与通联分析分别涉及一部分独立或相互关联的参数信息,如实时网络拓扑中涉及各小站ID、地理位置等信息。如何从网络实时传输的数据中获取这些参数并进行有效的组织,是实时拓扑结构与通联分析实现方法的重要内容。对此,本文提出了基于分组的双线程分层分类参数提取方法。
最后,采用UML面向对象的建模方法[4],尽可能规范而有效地建立此类VSAT网络实时拓扑结构与通联分析的通用模型[5-7]。该通用模型对此类VSAT网络具备一定的普适性及可复用性,可为此类VSAT网络相关模块的设计提供一定的参考。
1 应用的实现形式
首先,对于传输体制为TDM/MF-TDMA/DAMA的星形VSAT网络,其拓扑结构与通联分析的应用具有分层分析、全网同步与实时处理的特点。即主要针对链路层与网络层分别分析并相互结合,且对全网内向信道与外向信道进行实时同步分析。
基于以上3个特点,对此类VSAT网络实时拓扑结构与通联分析的具体应用作具体分析。
1.1 实时拓扑结构分析
VSAT网络的网络拓扑主要包含链路层与网络层两层。对于链路层,由于研究对象为星形网络,各小站只能与中心站直接连接,因此链路层拓扑信息可以仅包含各小站ID、上下线情况,以及地理位置分布信息。网络层拓扑与计算机网络类似,应包含各路由器分布及连接情况、各路由器端口IP地址,以及各路由器端口所连接的子网。同时,网络层拓扑与链路层拓扑之间存在对应关系,即各VSAT小站以及中心站应有各自对应的内置或直连的出口路由器。
此外,网络拓扑应能实时反映网络中小站的上下线情况、地理位置变化情况、各路由器连接变更情况等实时变化信息。
综上,对于本文研究的VSAT网络类型,其网络拓扑应为实时动态更新的双层立体结构,且两层之间通过出口路由器相关联,如图1所示。
1.2 实时通联分析
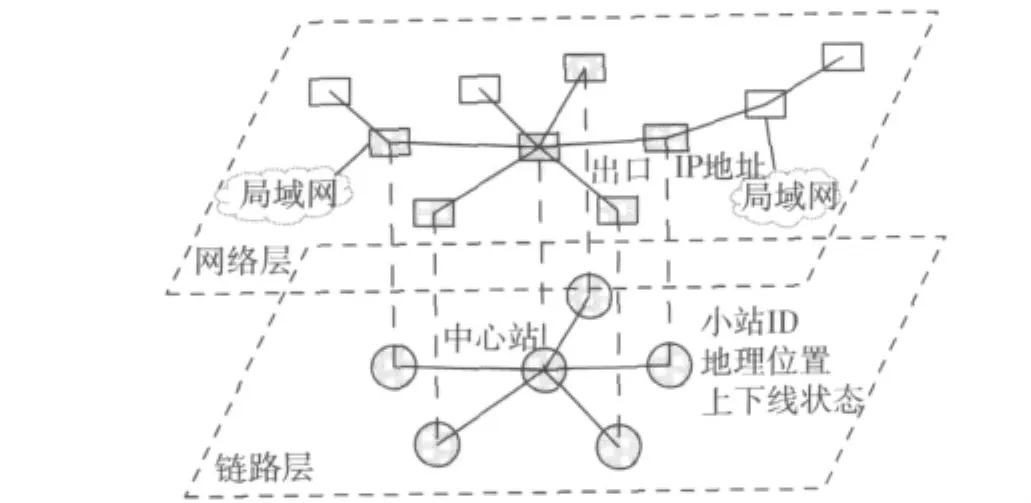
图1 实时双层网络拓扑示意图
对于VSAT网络,其联通关系可定义为VSAT传输网络所承载的网络层业务信息。当然,对于不由VSAT无线网络承载的业务信息,如某小站连接的地面网络中两个网络节点之间的通联,不应包含在VSAT网络的通联分析范围内。此外,通联关系还同时涉及相应经过的小站以及小站之间交互的网控信息。对于星形网络,网络层的一次通联还可能涉及中心站的转发过程。
具体的通联分析应用方式如维持一张用于通联过程监测与故障管理的通联信息表。应包含每次通联中涉及的相关信息,包括通联双方节点的IP地址、本次通联业务类型、本次通联的流量、通联时间,以及连接建立与数据传输过程中涉及的链路层小站(或中心站)及各站之间交互的网控信息等。这些网控信息可能同时涉及外向信道与不同的内向信道,且交互过程遵循严格的同步时序。此外,通联信息表中的内容应随着每次通联过程的进行实时添加记录。
此外,以通联信息表为基础,还可经过统计得到用于流量管理的流量统计表,以及用于单个节点流量监测的节点实时流量图等。
2 实现原理分析
本节围绕上述VSAT网络实时拓扑结构与通联分析的3个特点,探讨其中涉及的相关参数的获取方法,并总结为基于分组的双线程分层分类参数获取方法。
2.1 分层分类的参数获取方法
根据分层分析的特点,首先将网络实时传输数据分两层进行参数提取。
第一层为链路层网管网控信息,仅在中心站与各小站之间交互,且不承载网络层业务信息。此类网管网控信息主要包含2个子类:
1)小站状态信息,即中心站收集各小站状态或各小站主动报告自身状态时在中心站与小站之间交互的信息。包括小站ID、上下线信息、小站地理位置信息等。显然,此类信息可主要反映在实时网络拓扑中的链路层网络拓扑信息中。
2)中心站与小站之间交互的信道申请信息与信道分配信息。对于信道分配形式为按需动态分配(DAMA)的星形VSAT网络,与各小站连接的网络用户节点在有业务数据需要传输时,需由对应的小站根据待传输的数据量向中心站发出信道申请。中心站联系当前网络信道的占用情况,为该小站在某内向信道上分配一定起始位置与大小的信道。如上所述,此类信息应包含在通联信息表中。
第二层为网络层数据信息,此类信息主要包含2个子类:
1)用于网络层路由表维护与更新的路由信息。如RIP协议数据包、OSPF协议数据包,以及SNMP中的路由信息等。此类信息可主要用于实时网络拓扑中的网络层拓扑信息[8]。即在无法直接获取各路由器内部路由表的情况下,可根据在各站之间发送的路由信息,间接挖掘网络层拓扑信息。此外,由于经空口传输的路由信息包均由各站出口路由器发出,因此,可认为这些路由信息包的源IP地址即为各站出口路由器的出口IP地址。由此,实时网络拓扑中链路层网络拓扑与网络层网络拓扑之间的对应关系即可确定。
2)用户业务信息。即网络层节点之间互通的数据、话音等业务信息,包括通联双方IP地址、通联起始时间、结束时间,以及业务数据类型等。此类信息应包含在通联信息表中,并与上述链路层与通信建链有关的网控信息相结合。
以上分类即为此类VSAT网络实时拓扑结构与通联分析中涉及的相关参数信息在网络传输数据流中的来源,可称为参数提取层。在此基础上,按照第1节中各具体应用的分类,将参数提取层中的各类信息按照不同的应用进行重新组织,称为参数应用层。最后,一些参数信息不一定能够从数据流中直接提取,如网络层拓扑信息需要从路由信息中进行挖掘等,因此,参数应用层的信息还需进行一定的信息挖掘和处理过程,最终实现各应用需求,称为参数挖掘层。
综上所述,可将各具体应用涉及的参数信息的获取方法总结为分层分类参数提取方法,如图2所示。
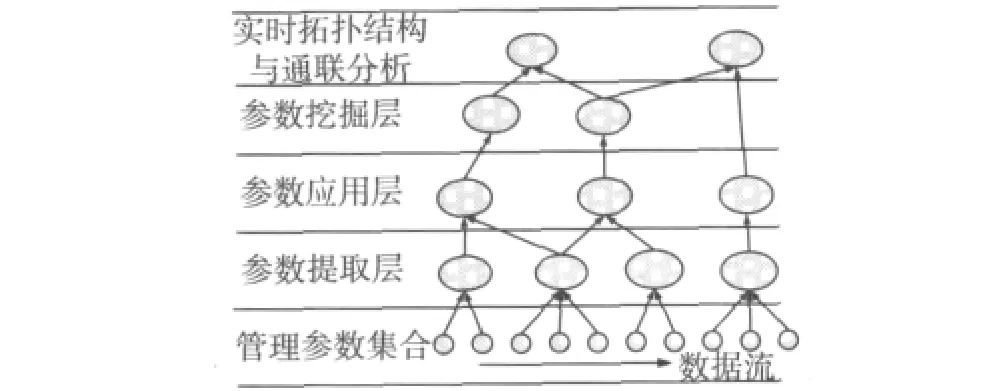
图2 分层分类的参数提取方法
2.2 基于分组的双线程参数提取方法
根据实时处理与全网同步的特点,应设定一个数据处理单元,对全网数据以数据处理单元为单位进行实时处理,此时系统处理延迟即固定为数据处理单元的大小。显然数据处理单元应尽量小,以保证系统对于实时性的要求。整个处理系统按照“数据采集→参数提取→应用实现”的步骤进行。
对于数据处理单元的选择以及具体的实现步骤和方法分析如下:
首先,对全网传输数据以数据处理单元为单位进行全网同步采集。对于参数提取模块来说,相当于依次到达的数据处理单元所组成的数据单元流。由于全网同步的需要,各数据处理单元应保留在网络数据中的真实发送时间,以在数据单元流中进行全网排序,按照网络中数据传输的真实顺序进行依次处理。发送时间以时间戳的形式作为每个数据处理单元的附加信息。
由此,对于参数提取模块,数据采集所得的数据单元流如图3所示。其中各数据处理单元的大小与发送时间(即时间戳)不一定相同,设各单元的时间戳按数据发送的先后顺序分别为t1,t2,t3,t4。显然,参数提取模块应首先处理时间戳为t1的数据单元,且在时间戳为t2的数据单元到来之前处理结束,依此类推。
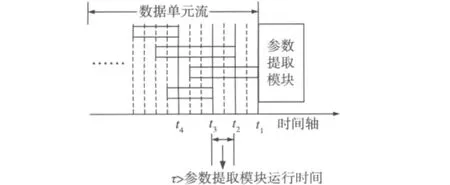
图3 “数据单元流”示意图
由此可得,假设数据单元流中数据单元发送时间的最短时间间隔为τ,则参数提取模块的运行时间必须小于τ。
具体而言,数据处理单元的选择一般可按编码方式分为两类。
1)编码方式为卷积码的网络(见图4)

图4 “卷积码”时的数据流形式
其中外向信道与内向信道以一定大小的帧周期保持同步。发送数据时,外向信道分组按照特定的信息块大小进行编码,之后各分组时分复用,并在帧头或帧尾加上一定的同步信息,形成连续载波的外向信道数据。而内向信道分组按照与外向信道相同或不同的信息块大小进行编码,加上突发头及保护带宽等后,形成固定大小的数据块。数据块大小称为时隙。综上,内向信道应由若干大小为1个时隙的数据块以连续或间隔若干个时隙的方式占用信道。
由此,对于编码方式为卷积码的VSAT网络,若选取的数据处理单元为数据帧,则相应的数据单元的最短间隔τ为1个帧周期,即参数提取模块的最长处理时间为1个帧周期。但此时系统延迟为1个帧周期;若选取的数据处理单元为时隙,则相应的数据单元最短间隔τ为1个时隙,此时系统延迟为1个时隙。显然,以时隙作为数据处理单元更能满足系统的实时性需求。事实上,由于时隙由各数据分组以相同大小的编码信息块进行编码,并加上保护时隙等其他信息组成,因此,以时隙为单位相当于译码后以分组为单位。
此外,由于外向载波与内向载波在通信中以帧同步为前提对帧内各自的数据分组按独立的线程进行处理,因此,当以时隙或分组为数据处理单元时,管理参数提取同样应采用双线程的工作模式,对外向信道与内向信道分别进行处理。
2)编码方式为分组码的网络(见图5)
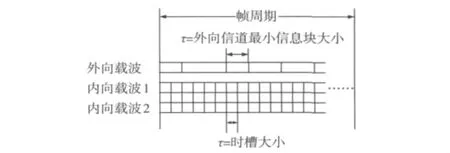
图5 “分组码”时的数据流形式
其中外向信道与内向信道同样按照一定的帧周期同步。但与卷积码编码方式的网络不同,外向信道分组与内向信道分组编码后的编码信息块不是固定大小。因此,各编码信息块发送时间的最短时间间隔不再是固定大小。
对于此类网络的外向信道数据,最小时间间隔应为最小的编码信息块大小,即最小分组对应的编码信息块大小。具体网络有不同的最小外向信道分组大小。而对于此类网络的内向信道,一般设置了一个最小时间单位时槽,各突发占用整数个时槽。因此,同样采用分组为数据处理单元时,内向信道数据单元可能的最小时间间隔即为时槽大小。只要相应的参数提取模块的运行时间小于时槽大小,即可满足系统实时性要求。
如图6所示,考虑到双线程处理模式下,外向信道与内向信道参数提取模块的运行时间可能不同步,如某主站数据分组比某小站数据分组的发送时间早,但参数提取过程较小站分组更长,于是,小站分组的参数获取更快,此时若立即存入上述参数提取层的参数库表,则参数库表的顺序发生错误,导致后续参数实时读取顺序发生错误。为解决此问题,可按各分组的时间戳大小为各分组依次加上一个分组顺序标号,并将标号存入一个先进先出的顺序队列,各分组的参数按照队列信息指示的顺序存入参数库。
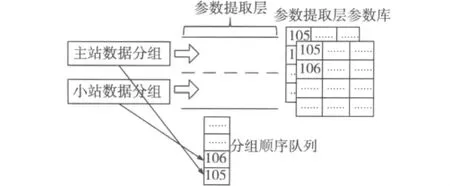
图6 分组顺序队列
3 基于UML的实时拓扑结构与通联分析模型
本节对上述实时拓扑结构与通联分析的应用及实现原理进行总结,并用UML类图进行建模。模型按照图2所示的系统工作层次分为3部分。其中图7为参数提取层模型的UML类图。

图7 参数提取层UML类图
图7中的参数提取层参数库按照该层的分类方法是一个分类模型,用UML类图表示如图8所示。
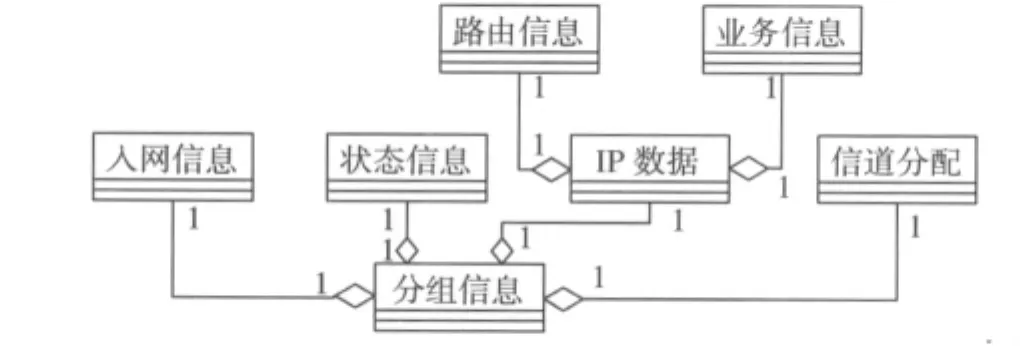
图8 参数提取层参数库UML类图
最后,“参数应用层”与“参数挖掘层”完成对“参数提取层”参数库的重新组织与信息挖掘,最终完成相应管理应用,用UML类图表示如9所示。

图9 参数应用层与挖掘层UML类图
上述各UML类图中的参数类均包含各自相关的特征参数,且以统一的格式表征与存储。各参数列表在此不作详述。
4 小结
本文以通信体制为TDM/MF-TDMA/DAMA的星形VSAT网络为研究对象,建立了此类VSAT网络实时拓扑结构与通联分析的通用模型。该模型充分结合VSAT网络自身特性,对此类VSAT网络具备一定的普适性和可复用性。提出了基于分组的双线程分层分类参数提取方法,其思路也可为其他类型VSAT网络相关模块的设计提供参考。
[1]MARAL G.VSAT networks[M].Chichester:John Wiley & Sons,2004.
[2]朱庆弦,张杰,张骏温.网络管理技术的发展趋势[J].电视技术,2005,29(12):54-58.
[3]杨华,黄焱.DVB-RCS卫星交互网通信体制研究[J].电视技术,2010,34(9):10-12.
[4]BLAHA M,RUMBAUGH J.UML面向对象建模与设计[M].北京:人民邮电出版社,2011.
[5]ITU-T Rec.M.3020,TMN interface specification methodology[S].2007.
[6]王颖,王智立,邱雪松,等.基于流的IP网管理信息建模方法及其模型[J]. 通信学报,2008,29(12):102-107.
[7]夏海涛,吴格含,孟洛明,等.基于生命周期的通用业务管理信息建模的研究[J]. 电子学报,2004(7):1074-1077.
[8]杨国正,陆余良,夏阳.计算机网络拓扑发现技术研究[J].计算机工程与设计,2006,27(24):4710-4752.
猜你喜欢
加油站服务指南(2022年6期)2022-07-28
净水技术(2022年1期)2022-01-13
科技资讯(2021年10期)2021-07-28
环境卫生工程(2021年3期)2021-07-21
广东通信技术(2020年7期)2020-08-13
中国铁路文艺(2019年3期)2019-04-29
现代商贸工业(2017年23期)2017-09-13
物联网技术(2015年8期)2015-09-14
小说月刊(2015年12期)2015-04-23
中国神经再生研究(英文版)(2014年11期)2014-01-22