机载平台AIS时隙冲突及发现概率分析✴
2012-06-24 14:33:48杨奎寻远
电讯技术 2012年6期
杨奎,寻远
(中国西南电子技术研究所,成都610036)
机载平台AIS时隙冲突及发现概率分析✴
杨奎,寻远
(中国西南电子技术研究所,成都610036)
分析了机载船舶自动识别系统(AIS)时隙冲突机理。通过建立机载AIS发现概率的分析计算模型,得出了机载AIS系统监视时间、船只密度与发现概率间的关系。仿真结果和试飞数据较为吻合,对机载AIS系统工程化具有实际参考价值。
机载AIS;时隙冲突;发现概率
1 引言
船舶自动识别系统(Automatic Identification System,AIS)主要用于对海上航行的船只进行动态跟踪,实现船只、船岸间的船只标识、位置、航向、航速等航行信息的自动交换[1]。AIS采用自组织时分多址(Self-organizing Time Division Multiple Access,SO -TDMA)通信协议,自动地播发出本船的静态、动态和航次信息[2]。AIS可弥补传统雷达监测在自动识别目标以及获取航行动向信息等方面的不足,对雷达监测起辅助或替代作用。AIS舰载系统、船只交通管理系统(VTS站)之间的通信距离通常为视距。为了在更大范围海域内航行安全性、国防以及环境保护的需要[3],可建立机载基站、卫星基站,用来接收大范围海域内各种AIS系统发送的消息。
AIS接收机大范围海域内的冲突问题引起了国内外研究者的高度重视。文献[4]和[5]对星载AIS信号接收冲突概率进行了分析;文献[6]针对以港口中心的船只数量渐变分布的特定模拟场景,进行了时隙冲突概率分析。机载监视范围内船只的随机分布及运行状态极其复杂,不便于对各种状态逐一仿真得出特定场景、特定观测时间内的船只发现概率。本文通过对船只分布状态、报告发送周期等合理假设,构建了发现概率数学模型,既兼顾了船只分布状态的多样性又降低了仿真复杂度;最后通过模拟仿真和试飞数据分析对结论进行了验证。
2 机载AIS系统简介
基于机载平台的AIS系统,将拥有比海面平台AIS系统更大的监视、跟踪覆盖区域,但是面临一个更大的挑战,即当同时接收到来自多个不同区域的消息时,可能会产生时隙冲突,从而导致大量消息的丢失,大大降低了机载AIS系统对船只的发现概率。
船只在机载AIS的监视范围内的分布如图1所示。其中,大圆表示机载AIS的监视范围,中间的小圆表示一个视距区域(通常半径为20 nmile),小点表示船只。

图1 船只分布示意图Fig.1 The ship distribution situation map
3 时隙冲突及发现概率分析
3.1 时隙冲突
AIS通信包括两个信道,每个信道以1 min作为一帧,一帧包含2 250个时隙。任一船只可按一定的时隙选择算法选用一个时隙(或多个时隙,但在这里我们考虑每条船只占用一个时隙)发送信号,而机载AIS则需要进行时隙同步之后,按照网络时隙进行数据接收。
因为AIS消息的发射与世界协调时间(UTC)时间同步,SO-TDMA协议可以协调特定的有组织区域内的时隙的使用,而机载AIS的监视范围内又同时存在多个有组织区域,这些区域之间不存在协调关系。如图2所示,当机载接收机在同一时间接收到不同自组织区域发出的消息时,就可能产生时隙冲突。
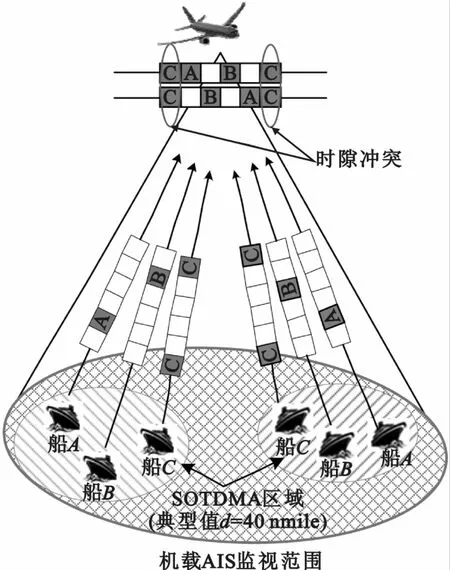
图2 机载AIS时隙冲突Fig.2 Airborne AIS slot-collision demonstration
导致机载AIS接收机接收时隙冲突的原因可分为以下两类:
(1)来自不同有组织区域内的船只在同一时隙发射信号,这种冲突称为第一类型冲突;
(2)当AIS的监视范围足够大时,即使来自不同组织区域内的船只选择不同的时隙发射信号,有可能因为延时导致相邻的时隙信号同时到达,这种冲突为第二类型冲突。
AIS数据分组结构中,每个时隙内的信息留有12 bit的距离延时缓冲区,而数据传输速率为9 600 bit/s,故这12 bit对应的最大不发生冲突的距离为

所以,只要是和机载AIS的距离差不超过202 nmile,就不会发生由于延迟而造成第二类型的冲突。根据视距计算,飞行高度为海拔8 000 m的机载AIS的监视范围小于350 km(188.5 nmile),故可不考虑第二类型冲突。
当发生时隙冲突时,在接收站将会导致下面两种结果之一:一是接收混淆,即在该时隙内所发出的一系列消息中,接收站一条正确消息都接收不到;二是区别接收,即在该时隙内所发出的一系列消息中,接收站能正确接收到一条消息。
AIS接收机同信道抑制典型值为8 dB,即同一时刻到达的两个信号功率相差8 dB以上时,接收机能区分较强的信号并对其进行解析。时隙冲突的结果究竟是接收混淆还是区别接收,取决于欲占用同一时隙的两个发射站与接收站之间的距离远近。
3.2 发现概率数学模型
3.2.1 发现概率
对于一个船只,如果它发出的AIS消息中至少有一条消息被机载AIS接收机收到和解析,则认为该船只被检测到。在机载AIS的覆盖范围内,被检测到的船只数目与所有船只数之比称为发现概率。发现概率与以下因素有关:AIS船只的数量,船只的AIS通信终端的工作状态(即报告发送周期),SO-TDMA的有组织区域大小,机载AIS的监视(监视区域)大小,机载AIS的监视时间,时隙冲突的区别接收。
3.2.2 假设条件
为简化发现概率分析,进行了如下5个方面的条件假定。
(1)假设机载监视范围内的船只在各自组织区域内均匀分布,因为在机载AIS监测范围内的船只总数一定的情况下,船只均匀分布状态下的冲突概率最高。
(2)为了后续分析方便,将自组织区域设为40 nmile×40 nmile正方形区域。一般情况下,船只之间可以互通信息的区域半径为20 nmile(取船只天线高度10 m估算),在某一固定时刻,机载AIS覆盖范围半径为350 km(188.5 nmile),该范围内包含69.77个自组织区域。为从严考虑,取AIS覆盖范围内的有组织区域的个数M为69。
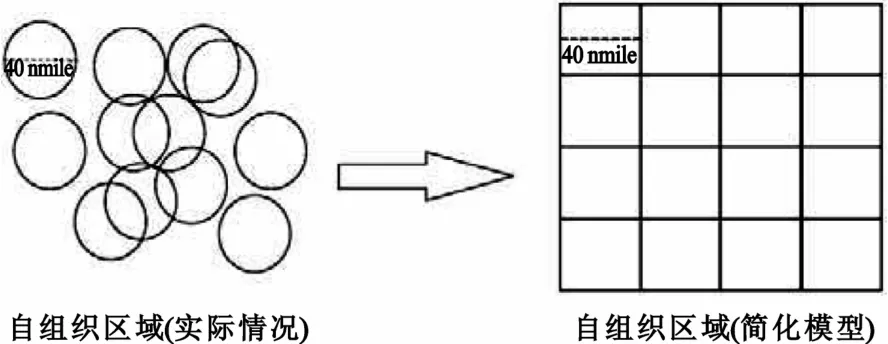
图3 自组织区域的简化模型Fig.3 A brief model of the self-organized area
(3)单个AIS自组织区域内所有船只之间不存在冲突,时隙冲突仅发生在跨自组织区域的船只之间。
(4)单个AIS自组织区域内所有船只的AIS报告周期ΔT均相同。
在港口周围,船只数量多,并且大多是低速船只和锚泊船。根据2010年上海港提供的船只分布数据统计[7],各类船只在系统中所占的百分比如表1所示,可计算平均报告周期为116.83 s。
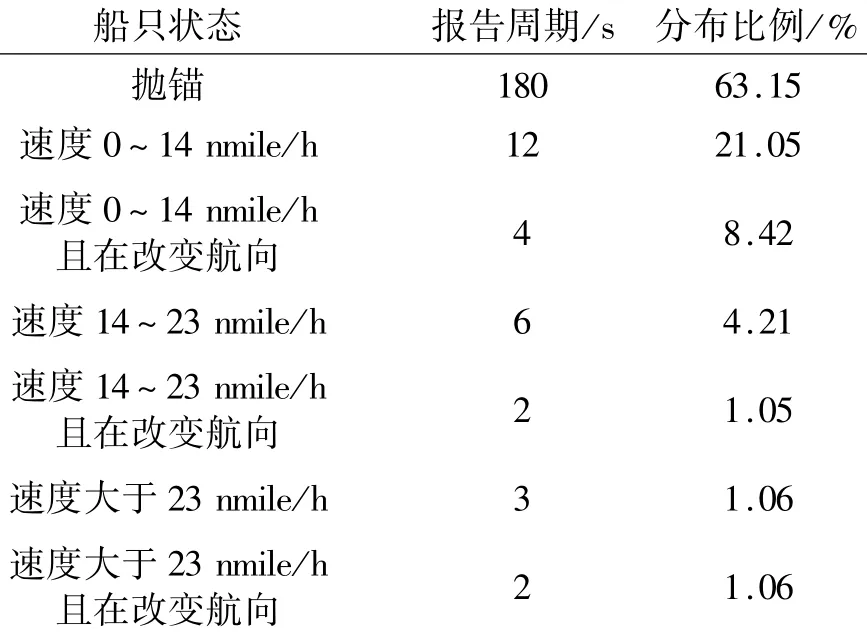
表1 港口海面船只状态统计Table 1 The state statistics of ship in a harbor
在非港口海面时,海面船只以高速航行的船只为主,因此,平均报告更新时间与上述分析不同。按照表2的统计数据,可计算平均报告周期为6.3 s。

表2 非港口海面船只状态统计Table 2 The state statistics of ship on seasurface away from harbor
故按照港口海面和非港口海面两种情况的分析,从严考虑,取报告更新时间平均值为6.3 s进行仿真分析。
(5)假设每只船在发送周期内仅发送一次AIS消息,因大多数情况下,船只报告只需要占用一个时隙。
3.2.3 发现概率数学模型
设机载AIS监视区域内船只的总数目为N,监视区域内有组织区域的数目为M,船只向机载AIS发射信号的平均发射周期ΔT,机载AIS的观测时间Tobs。下面考虑在任意指定一个有组织区域内的船只被成功发现的概率。
AIS位置报告率Rr与报告周期ΔT的关系为60/ΔT。AIS每个信道划分为1 min长的超帧时隙数为2 250。计划时隙增量NI为

假设在每个有组织区域内船只平均分布,则N/M表示每个有组织区域内船只的数目。对给定的一个有组织区域内的N/M条船,占据N/M个时隙,那么另一个区域与之发生碰撞的概率是

其逆事件即成功检测到信号的概率为1-P1。而一共有M个区域,那么给定的区域的船只检测到的概率为P2=(1-P1)M-1,其逆事件发生碰撞的概率为1-P2。
在机载AIS的观测时间内,船只一共发射了Tobs/ΔT个信号,而在不同的自组织区域间信号发射是相互独立的,故Tobs/ΔT个信号全部发生碰撞的概率为

那么在机载AIS的监测区域内,给定的有组织区域能够被成功检测到的概率是1-P3。
综上所述,若仅考虑第一类型冲突的接收混淆造成的影响,则在任意指定一个小区内的船只被机载AIS两个信道发现的概率为

若考虑时隙冲突中的区别接收,则需计算出区别接收的概率,并可对上述模型进行修正:

其中,系数k为时隙冲突系数。
统计在既定的机载AIS监视时间内,机载AIS覆盖范围内的所有船只都将被发现到的概率。这种标准更为严格,其表达式为PAll=PN,其中P由式(6)给出。
由于时隙冲突只考虑第一类型的冲突,确定冲突系数k,需先确定产生时隙冲突时能区分接收的概率。时隙冲突的结果究竟是接收混淆还是区别接收,取决于欲占用同一时隙的两个发射站与接收站之间的距离远近及天线方向性增益。假定飞机及船只的AIS均采用半波阵子天线,方向图如图4所示,其垂直面方向性函数可用下式来表示:

图4 半波振子天线方向图Fig.4 The field pattern of half-wave dipole
采用蒙特卡罗方法,随机选择不同自组织区域的时隙冲突,并依据距离远近和天线方向性增益的差别,来统计冲突信号之间的信号强度满足同信道抑制8 dB要求的冲突概率。区别接收示意图如图5所示。经过10万次随机实验,得出不同有组织区域产生时隙冲突时能区分接收的概率为0.164 3。由此,取时隙冲突系数k为0.835 7。
图5 区别接收示意图Fig.5 Separate signal receiving
4 仿真及结果分析
现假定以下仿真条件:飞机高度h=8 km;机载AIS监测范围半径R=350 km(188.5 nmile);所有船只的消息发送周期均为ΔT=6.3 s(非港口海面);AIS信道数为2;SO-TDMA自组织区域边长为20 nmile;有组织区域的数目M=69,且每个有组织区域内船只数量相同;时隙冲突系数k=0.835 7。
应用本文前述的模型及仿真条件,采用MATLAB仿真平台对机载平台AIS时隙冲突及发现概率进行了仿真分析。图6是机载AIS监视范围内的船只的总数量(1~4 000只)与发现概率的函数关系图。
图6 不同监视时间下的船只数量和发现概率关系图Fig.6 Relationship between the detection probability and the actual number of ships in different time
从单条曲线向右下降趋势可知,机载AIS监视范围内的船只数量越多(船只越密集),发现概率就越低。从曲线族随观测时间增长而右移可知,随着监测时间增加,发现船只的概率随之增大。
考虑到船只AIS端机的工作状态在港口周围海面和非港口海面的分布差异造成的平均报告更新周期不同,下面分析几种报告更新周期下的发现概率情况,仿真结果如图7所示。图7中的仿真参数除了报告更新时间外,其他参数都与上文中所取的参数一致。

图7 不同监视时间、报告更新周期下的监视船只数量和发现概率关系图Fig.7 Relationship between ship number and detection probabilities under different surveillance time and report rates
图8 是机载AIS试飞实测场景。此场景下,机载AIS收到的报文统计的平均报告更新周期为10.1 s。
图8 机载AIS试飞实测场景Fig.8 A measurement result of airborne AIS flight test
图9 给出了报告更新周期为10 s,在给定发现概率条件下,监视时间与监视范围内的船只数量关系。

图9 观测时间与监视船只数量的关系(报告周期为10 s)Fig.9 Relationship between the time and the number of ships in the area of surveillance(report rate is 10 s)
根据仿真分析,机载平台视距范围内的船只数增大时,船只被发现的概率下降,要全部发现的监测时间也越长。图9中的试飞数据曲线和相同平均报告更新周期条件下的仿真结果较为吻合。
5 结束语
通过船只平均分布、平均报告更新周期等合理假设,建立了机载AIS对其监视范围内船只的发现概率的计算模型,避免了因船只分布状态复杂多样而不便开展仿真的问题。由仿真模型结合港口监测和实际试飞得出的船只统计数据,计算出的机载AIS监视时间与监视船只数量的关系与试飞结果较为吻合,对机载AIS系统工程化具有实际参考价值。
[1]王飞舟,范成梁.自动识别系统(AIS)性能综合评价[J].中国航海,2001,48(1):14-17.
WANG Fei-zhou,FAN Cheng-liang.Comprehensive Assessment of AIS Performance[J].Navigation of China,2001,48(1):14-17.(in Chinese)
[2]刘鹏,谢永锋.AIS系统中SOTDMA协议仿真与分析[J].电讯技术,2010,50(3):37-40.
LIU Peng,XIE Yong-feng.Simulation and Analysis of SOTDMA Protocol for Automatic Identification System(AIS)[J].Telecommunication Engineering,2010,50(3):37-40.(in Chinese)
[3]郝盛,陈涤非.星载AIS收发机的关键技术初探[J].航空电子技术,2007,38(4):7-11.
HAO Sheng,CHEN Di-fei.Primary Research on the Key Technologies of Satellite-Based AIS Transceiver[J].Avionics Technology,2007,38(4):7-11.(in Chinese)
[4]Eriksen T,Hφye G,Narheim B,et al.Maritime Traffic Moni-toring Using a Space-Based AIS Receiver[J].Acta Astronautica,2006,58(10):537-549.
[5]钟杰,王怀胜,郑力.星载AIS接收冲突分析及仿真[J].电讯技术,2010,50(10):6-11. ZHONG Jie,WANG Huai-sheng,ZHENG Li.Analysis and Simulation of Ship Detection Probability of Space-based AIS[J].Telecommunication Engineering,2010,50(10):6-11.(in Chinese)
[6]曹劲,马永华,寻远.机载AIS接收机冲突概率分析[J].电讯技术,2010,50(10):57-62. CAO Jin,MA Yong-hua,XUN Yuan.Collision Probability Analysis of Airborne AIS Receiver[J].Telecommunication Engineering,2010,50(10):57-62.(in Chinese)
[7]胡越黎,孙斌.AIS网络数据链路容量分析及拥塞解决方法[J].计算机测量与控制,2007,15(11):1631-1634.
HU Yue-li,SUN Bin.Data link Capacitance and Congestion Resolution for AIS[J].Computer Measurement&Control,2007,15(11):1631-1634.(in Chinese)
YANG Kui was born in Lichuan,Hubei Province,in 1979.He received the B.S.degree in 2002.He is now an engineer.His research concerns avionics system and communication system,etc.
Email:cir98020927@sohu.com
寻远(1984—),男,湖南浏阳人,2006年获学士学位,现为助理工程师,主要研究方向为电磁兼容。
XUN Yuan was born in Liuyang,Hunan Province,in 1984.He received the B.S.degree in 2006.He is now an assistant engineer. His research concerns EMC.
Email:xun-yuan@yeah.net
Slot-collision and Detection Probability of Airborne AIS
YANG Kui,XUN Yuan
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
The slot-collision mechanism of airborne AIS(Automatic Identification System)is analysed.Through establishing the detection probability model of airborne AIS,the relationship between observation duration,ship densities and the detection probabilities is established.Simulation results are in good agreement with the measurement data,and the work in this paper provides reference for airborne AIS implementation.
airborne AIS;slot-collision;detection probability
U675.7;TP391.9
:A
10.3969/j.issn.1001-893x.2012.06.005
杨奎(1979—),男,湖北利川人,2002年获学士学位,现为工程师,主要研究方向为航空电子系统、通信系统等;
1001-893X(2012)06-0858-06
2011-11-17;
2012-02-17
猜你喜欢
环球时报(2022-04-16)2022-04-16 14:38:15
牡丹(2021年11期)2021-07-20 06:02:34
井冈教育(2020年6期)2020-12-14 03:04:32
铁道通信信号(2018年9期)2018-11-10 03:26:46
舰船电子对抗(2016年3期)2016-12-13 05:15:55
广西大学学报(自然科学版)(2016年5期)2016-11-12 06:28:54
舰船科学技术(2015年8期)2015-02-27 15:38:51
计算机工程(2014年10期)2014-06-07 05:53:21
浙江人大(2014年6期)2014-03-20 16:20:40
中国火炬(2012年3期)2012-07-25 10:34:06