
Effects of laser beam divergence angle on airborne LIDAR positioning errors
2012-06-21 01:58:34JIANGLifang姜利芳LANTian蓝天GUMeixia顾美霞NIGuoqiang倪国强
关键词:蓝天
JIANG Li-fang(姜利芳), LAN Tian(蓝天), GU Mei-xia(顾美霞),NI Guo-qiang(倪国强)
(Key Laboratory of Photo-electronic Imaging Technology and System,Beijing Institute of Technology,Beijing 100081,China)
Airborne light detection and ranging (LIDAR)is an advanced active sensing system for capturing three-dimensional information of earth surface.It is widely applied in forming digital elevation model (DEM),urban three-dimensional modeling, resources exploration, topographic mapping,forest survey,disaster monitoring,environmental monitoring,etc.
Like other remote sensing data,the data error analysis of LIDAR is very important and indispensable for the data calibration in remote sensing applications.The error sources affecting airborne LIDAR positioning accuracy are composed of factors such as sub-components errors,the components integrated error and errors produced by laser transmission medium and reflection surface interaction.
A number of publications have reported the existence of systematic errors and their effects on the processing of lidar data.Currently,two aspects of error analysis of airborne lidar data are mainly focused.One is based on the analysis of laser radar data[1-2].One example is a statistical analysis method based on overlapping scanning area to evaluate LIDAR data quality[2].The other is based on the analysis of systemic errors caused by various sub-components of airborne LIDAR and system integration[3-5].Errors such as attitude angle error,mounting error,range error,and scanning angle error all belong to this scenario[6-7].The influence of the laser beam divergence angle on the error of laser foot point’s position is usually ignored.In fact,the existence of laser beam divergence angle will cause pulse broadening of laser echo signal and spoil the range accuracy,thus affecting the positioning accuracy.In this paper,we discussed the influence of the laser beam divergence angle on the airborne lidar data accuracy under different terrain surface situations.
1 Geometrical positioning principle
The positioning of airborne LIDAR measurements system is a kind of geometrical positioning.Laser pulse range finder is installed on the aircraft.The device measures the slant range(R)between the laser emitting point and the laser points(reflex points)recording the time delay between the emitting laser pulse and the accepting pulse.At the same time,inertial navigation system (INS)or GPS/INS integrated navigation system measures the parameters of aircraft attitude,such as roll angle,pitch angle and heading angle.GPS system provides carrier tracking information.In the postprocessing,the position of each laser foot point can be calculated through combining the attitude angle information,carrier tracking information and slant ranger information.The general laser equation has been derived through a series of coordinate transformation[7]as follows

where (X,Y,Z)T84is the position vector of laser point in WGS-84coordinate system,(X0,Y0,Z0)Tis the position coordinates of GPS antenna phase(i.e.,spatial location coordinates of the aircraft).MWisformedbylongitudeandlatitudeofthe GPSantenna.MGrotatestheearth-tangentialreferencesystemtoaWGS-84systemthatiscentered attheGPSantennaandisorientedbythelocal vertical.TherotationmatrixMWtransformsitto theEarth-centered,CartesianWGS-84.MINSisthe rotationmatrixdeterminedbytheanglesderived fromtheINSmeasurements.[δx,δy,δz]Tisthe translationvectorbetweentheGPSantennaandlaseremittingpoint.Mmistherotationmatrixfrom laserscanningreferenceframetoINSreference frame.MSisrotationmatrixbetweenlaserbeam andlasersystemdefinedbyscanninganglesθi.Rrepresentstherangemeasuredbylaserscanning system.
2 Effects of laser beam divergence angle on the airborne LIDAR positioning error
From Eq.(1),main factors affect the position error of laser point are GPS positioning error,scan angle measurement error,range error,mounting bias,and attitude measurement error.Besides these systemic errors,there are other factors which influence the detection accuracy,such as laser beam divergence angle and ground conditions.In the past,when people discussed the positioning error they usually supposed the terrain surface being flat and laser beam divergence angle being zero.However,in many cases,the terrain of scanning area has a certain slope and the laser beam cannot be a line,but has a certain divergence angle.The laser divergence angle will cause pulse broadening of echo signal detected by rangefinder,thereby increase the timing uncertainty of distance measurement electronics precision and reduce the signal noise ratio,which will cause ranging error and affect the coordinate accuracy of laser point.In this paper,taking flat terrain,downhill section of slope terrain,uphill section of slope terrain as examples,we discuss the effects of laser beam divergence angle on airborne LIDAR positioning accuracy.
2.1 Pulse broadening induced by laser beam divergence angle
Fig.1illustrates the actual situations of airborne LIDAR measurements,whereθiisinstantaneouslaserscanningangle,Htheflightaltitude,Sthegroundslopeangle,andηthelaserbeamdivergenceangle.Thedistancefromthetwopoints withgreatestspaceonthefaculatotheemission laserarerespectivelyR1andR2.Inthefollowing,wewilldeducetheequationsofpulsebroadeningcausedbydivergenceangleoflaserbeamfor threedifferentsituations.
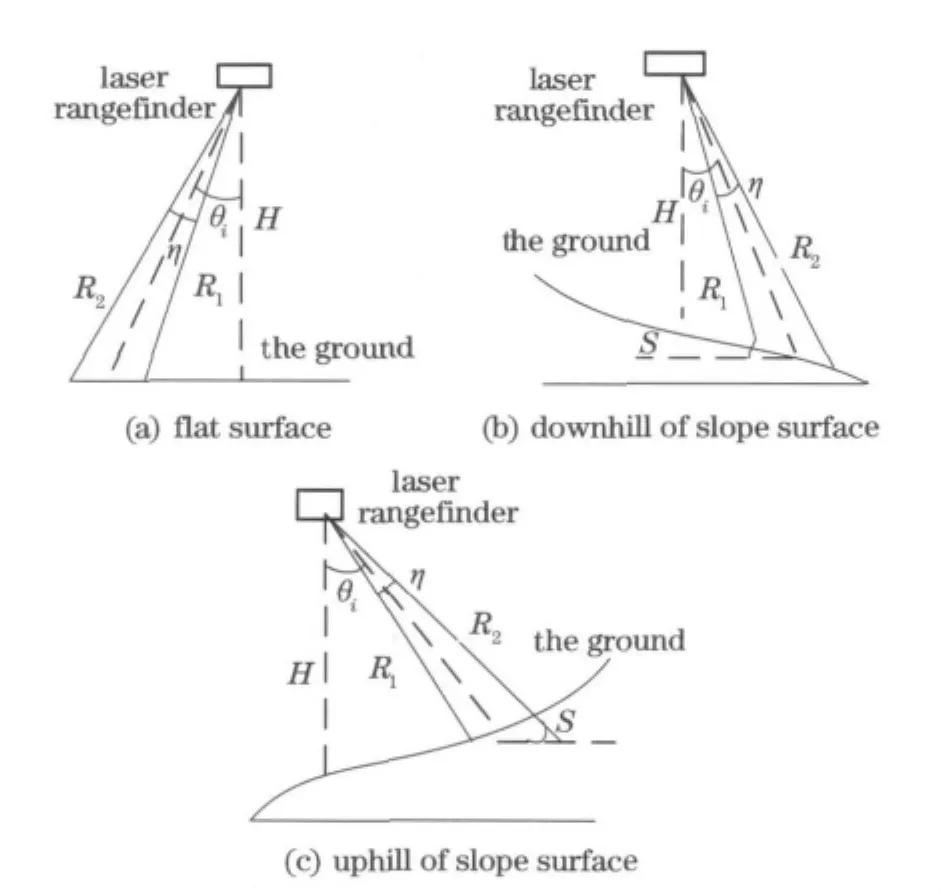
Fig.1 Three situations of airborne LIDAR scanning
①Forflatsurface:
Fig.1ashowsthefollowingrelationship,
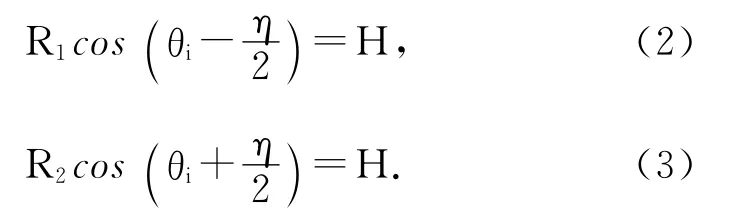
Then,

Pulse broadening induced by laser beam divergence angle is shown as
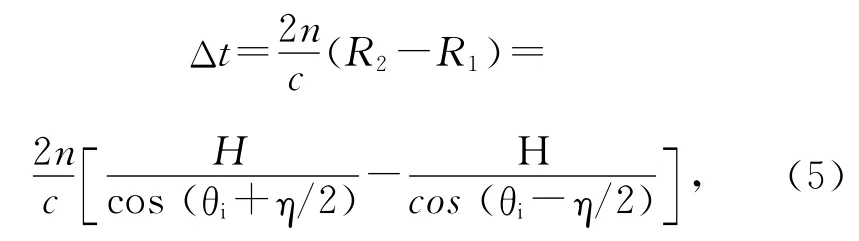
wherecis the light speed,nthe atmospheric refractivity.
②For downhill of slope topography:
As shown in Fig.1b,
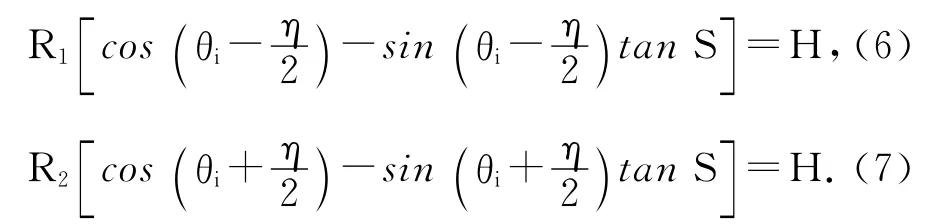
Then,

So,we can now express the pulse broadening as[8]
③For uphill of slope topography:
For the uphill sections of slope terrain shown in Fig.1c,similar to the above analysis,we have the pulse broadening equation[8]as

2.2 Error modeling
The pulse broadening affects the ranging accuracy in two aspects[8-9]:① The redistribution of laser echo energy in the larger time interval reduces peak power of signal to noise ratio,thereby increasing the error probability of distance measurement;②pulse broadening will increase the timing uncertainty by increasing echo signal rise time,which increases the dependence of the pulse amplitude on the across time.For a fixed pulse threshold detection circuit,the relationship among the range error,the pulse broadening and the SNR is given by[10]

whererSNRis signal to noise ratio.Respectively inserting Eq.(5),Eq.(9)and Eq.(10)in Eq.(11),the range error for different terrains is given by
①For flat terrain:

②For downhill section of slope terrain:
③For downhill section of slope terrain:
The positioning equation given in Eq.(1)establishes relationships among the measuring subsystems of an airborne LIDAR with the assumption of an ideal system and ideal system environment.For simplicity,if we only consider a range error and neglect all other errors,the positioning equation changes to

Respectively inserting Eq.(12),Eq.(13)and Eq.(14)in Eq.(15)then subtracting Eq.(1),we can obtain the positioning error equation of laser point in different terrain situations.To simplify the analysis,the error model is expressed in local level coordinate system.
①For flat terrain:

②For downhill section of slope terrain:

③For uphill section of slope terrain:

3 Error analysis and simulation calculation
We studied the effects of laser beam divergence angle on the error of laser point three-dimensional coordinates for different terrains.For simplicity,we consider the flight height(H),atmospheric refractivity,signal to noise ratio (SNR),attitude angles and mounting bias among equipment as constants,shown as Tab.1.From Eqs.(16)-(18),the errors of laser point threedimensional coordinates are only impacted by scanning angle,terrain slope angle and laser beam divergence angle.We discussed the different situations respectively.
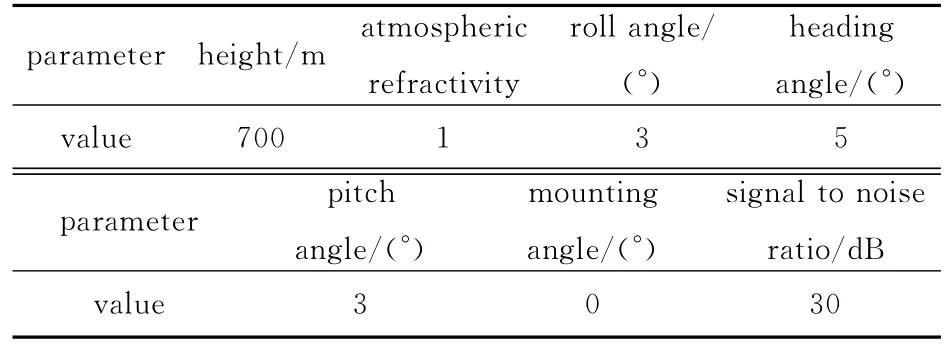
Tab.1 Parameter values used in simulation
3.1 Flat terrain surface
For the situation shown in Fig.1a,the threedimensional coordinate errors of laser point are calculated through Eq.(16)with the assumption of a scanning angleθi=30°andalaserbeamdivergence angleη=0.5mrad.TheerrorsareΔX=0.003 9 m,ΔY=-0.022 9mandΔZ=0.035 7m.When the laser beam divergence angle increases to 2 mrad,the errors increase toΔX=0.015 5m,ΔY=-0.091 6mandΔZ=0.142 6m.If the scanning angle increases to 45°and the laser beam divergence angle changes to 2mrad,the errors change to ΔX=0.036 0m,ΔY=-0.266 1m,ΔZ=0.241 4m.Fig.2and Fig.3show the influence of laser beam divergence angle and scanning angle on positioning error.From Fig.2,the positioning errors increase quickly with the increase of laser divergence angle since the increase of the laser beam divergence angle broadens the laser pulse width of echo signal and reduces the echo power detected by laser detector.The reduction of echo power will increase the timing uncertainty of the range finder,thereby increase the range error.Fig.3shows that the positioning errors increase with the increase of the scaning angle when the laser beam divergence angle is 1mrad and scaning angle varies between 0°and 60°.When scanning angle is small,the errors increase slowly.Otherwise when scaning angle is bigger than 30°,the positioning errorsΔYandΔZrise quickly.
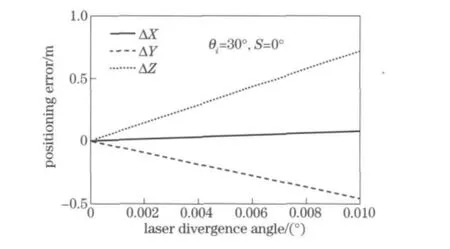
Fig.2 Effects of laser beam divergence angle on positioning error under flat terrain situation
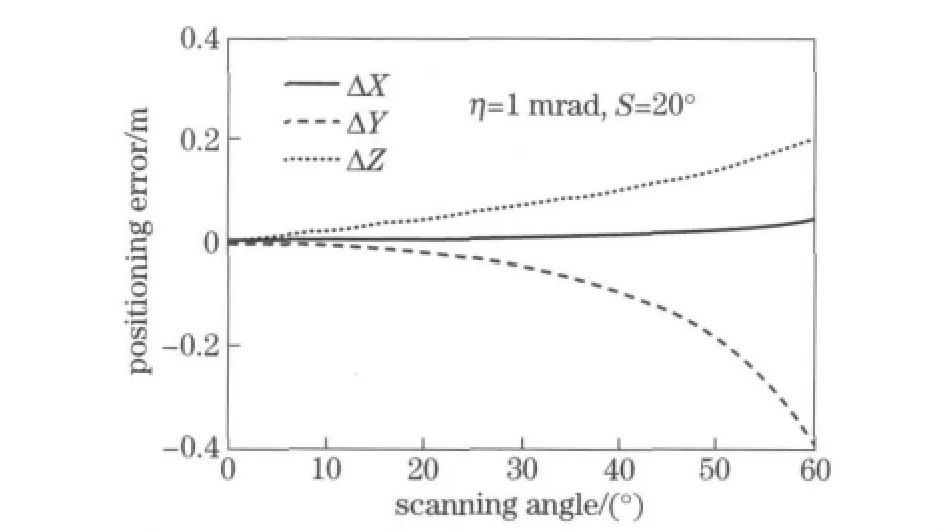
Fig.3 Effects of scan angle on positioning error under flat terrain situation
3.2 Downhill section of slope terrain surface
For downhill section of slope topography shown in Fig.1b,with the assumption of a scanning angleθi=30°,asurfaceslopeangleS=20°andalaserbeamdivergenceangleη=0.5mrad,positionerrorsoflaserpointscanbecalculated usingEq.(17).TheerrorsareΔX=0.010 1m,ΔY=-0.059 9m,ΔZ=0.093 1m.When the laser beam divergence angle increases to 2mrad,the errors increase to ΔX= 0.040 5m,ΔY=-0.239 5m,ΔZ=0.372 9m.If the scanning angle is 45°and a laser beam divergence angle is 2mrad,the errors change toΔX=0.121 1m,ΔY=-0.895 9m,ΔZ=0.812 6m.In the condition of the terrain slope angle being 20°,Fig.4and Fig.5respectively describe the effects of laser beam divergence angle and scaning angle on positioning errors.Just like the flat terrain,the larger divergence angle of the laser,the larger errors appear.From Fig.5,when the scaning angle varies between 0and 60°,the errors become larger with the increase of the scaning angle.However,we need to notice that the laser point positioning errors also have relationship with the sum of scaning angle and terrain slope angle.When the sum becomes close to 90°,the errors increase very quickly.

Fig.4 Effects of laser beam divergence angle on positioning error under downhill section
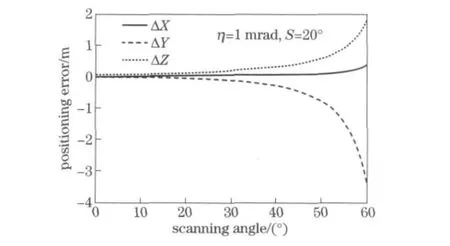
Fig.5 Effects of scaning angle on positioning error under downhill section
3.3 Uphill section of slope terrain surface
For uphill section of slope topography shown in Fig.1c,Fig.6and Fig.7,the effects of laser beam divergence angle and scan angle on laser point positioning errors are described respectively with the assumption of the terrain slope angle being 20°.Like the previous two cases,the laser point positioning errors increase quickly with the increase of laser beam divergence angle.However,the influence of scan angle is a little complex.The errors are zero when scan angle is equal to terrain slope angle.The reason is that when the scan angle equals terrain slope angle,the laser beam is perpendicular to the inclined surface,and the pulse broadening caused by laser beam divergence angle is zero,thus the errors are zero.When the scanning angle is less than the slope angle,errors decrease as the scan angle increases.When the scan angle is greater than the terrain slope angle,the errors become larger with the increase of scan angle.

Fig.6 Effects of laser beam divergence angle on positioning error under uphill section

Fig.7 Effects of scan angle on positioning error under uphill section
4 Conclusions
In this paper,we discussed the effects of laser beam divergence angle and scan angle on airborne LIDAR data errors in detail under different terrain conditions.The following conclusions can be drawn from our study.
In no matter what kind of terrain,the positioning errors increase with the increase of laser beam divergence angle.This is because the laser beam divergence angle causes pulse broadening of echo waveform,and then causes timing uncertainty of laser electronic timer.Technically,adding beam expander mirror in the optical system can improve the accuracy of laser radar.
In different terrain conditions,the effects of scan angle on the errors of laser point three-dimensional coordination are different.For flat terrain,positioning errors become larger with the increase of the scan angle.For the downhill section of slope terrain,when the sum of scan angle and terrain slope angle is less than 90°,positioning errors increase with the increase of the scan angle.But when the sum of the two approaches to 90°,the errors increase sharply.When the sum is equal to 90°,laser beam emitting direction is parallel to the slope surface,and laser beam can't hit the slopes.Eq.(17)is not suitable for this situation,so this will produce the singularity.For the uphill section of slope terrain,positioning error is influenced by the difference of scan angle and terrain slope angle.When the laser beam is perpendicular to the slope ground,the pulse broadening caused by laser beam divergence angle is zero,thus the positioning errors all become zero.
In the future,we will study the effects of aircraft vibration on the three-dimensional coordinate accuracy of the laser points and establish the error model under the influence of the vibration.We will also study error compensation methods.
[1]Wang Cheng,Menenti M,Stoll P,et al.Error analysis and correction of airborne LIDAR data[J].Journal of Remote Sensing,2007,11(3):390-397.(in Chinese)
[2]Latypov D.Estimating relative LIDAR accuracy information from overlapping flight lines[J].International Archive of Photogrammetry and Remote Sensing,2002,56(4):236-245.
[3]Filin S.Recovery of systematic biases in laser altimeters using natural surfaces[J].International Archive of Photogrammetry and Remote Sensing,2001,34(3-W4):85-91.
[4]Wu Jianwei,Ma Hongchao.Error analysis on laser beam misalignment with scanner mirror of airborne LIDAR[J].Infrared and Laser Engineering,2008,37(2):243-246.(in Chinese)
[5]Latypov D.Effects of laser beam alignment tolerance on LIDAR accuracy[J].International Archive of Photogrammetry and Remote Sensing,2005,59:361-368.
[6]Schenk T,Csatho B,Lee D C.Quality control issues of airborne laser ranging data and accuracy study in an urban area[J].International Archive of Photogrammetry and Remote Sensing,1999,32 (3/W14):101-108.
[7]Schenk T.Modeling and analyzing systematic errors in airborne laser scanners[D].Columbus:The Ohio State University,2001.
[8]Jiang Yuesong.Error analysis of airborne scanning range-finder[J].Remote Sensing Technology and Application,1998,13(2):1-9.(in Chinese)
[9]Guo Guangjun,Li Shukai,Hu Yihua.Study on the ranging performance of the airborne lidar[J].Journal of Optoelectronics·Laser,2001,12(6):592-595.(in Chinese)
[10]Salwen H C.Error analysis of optical range measurement systems[J].Proc IEEE,1970,58(10):1741-1746.
(Edited byCai Jianying)
猜你喜欢
连云港文学(2022年6期)2022-02-01 05:52:32
小哥白尼(军事科学)(2019年3期)2019-06-26 00:49:44
意林(儿童绘本)(2018年4期)2018-05-09 08:23:28
琴童(2018年2期)2018-03-06 16:44:13
娃娃乐园·综合智能(2017年7期)2017-05-17 05:31:37
中国商界(2017年4期)2017-05-17 04:36:41
快乐语文(2016年10期)2016-11-07 09:44:57
心理与健康(2016年1期)2016-05-30 06:26:39
上海建材(2016年2期)2016-04-06 06:27:53
天工(2015年3期)2015-12-21 12:23:44
 Journal of Beijing Institute of Technology2012年2期
Journal of Beijing Institute of Technology2012年2期
- Journal of Beijing Institute of Technology的其它文章
- Large deflection of annular throttle-slices in shock absorbers
- Low-complexity transceiver design scheme based on channel null-space feedback
- Active contours with normally generalized gradient vector flow external force
- Bicycle capacity of borrowed-priority merge at unsignalized intersections in China
- Distribution of driving trajectory of passenger car in highway horizontal curves
- Development of an occupant restraint system model and parametric study on equivalent crash pulse in vehicle frontal offset crash