双模混合动力整车仿真模型建立及分析①
2012-06-20 11:37杜爱民蔡宏伟
佳木斯大学学报(自然科学版) 2012年5期
杜爱民,孙 洛,蔡宏伟
(同济大学汽车学院,上海 201804)
0 引言
汽车在给人类生活带来便利的同时也带来了能源和环境的困扰,各国都对新能源汽车的研发投入了巨大的人力和物力.为了保证混合动力汽车在拥有良好燃油经济性和排放性的同时,又拥有能与传统汽车相媲美的动力性能,世界主要汽车生产商推出了各种不同的动力混合方案,如丰田Prius的THS混合动力系统,本田Insight的IMA混合动力系统等.
HEV和传统汽车比起来,能显著的改善燃油经济性.但是为了满足消费者,燃油经济性的改善不应以损失汽车的动力性以及驾驶乐趣为代价.为了解决这个问题,人们研制出各种功率分流装置(Power Split Device,PSD)来对HEV提供合理的能量管理.在混合动力汽车设计初期,利用计算机对整车进行建模仿真,能降低开发费用与缩短研发周期.
1 双模HEV整车仿真模型的建立
部分混合动力系统会使用两组或者两组以上行星齿轮,这样可以形成两条以上的传递能量的机械路径和一条电力路径,此时,发动机功率分流的方式则称为混合功率分流.在混合动力系统中,如果仅仅是用到输入或输出端功率分流的方式,则称为单模混合动力系统,如果用到两种功率分流方式的组合,则成为双模混合动力系统[1].
以ADVISOR中原有的Prius模型为基础,进行二次开发,建立了车速计算模型、发动机、电机、电池组、变速器及主减速器模型等,对双模HEV动力系统进行建模,为控制策略的制定和分析建立仿真平台.主要介绍发动机及电机模型的建立.
1.1 发动机模型
发动机系统是显著非线性系统,真实模型相当复杂.本文使用试验建模法对发动机建模,此方法计算简单,并且能较好的满足仿真要求.仿真软件ADVISOR 采用的是发动机实验数据模型[2,3].

图1 发动机试验油耗图
在HEV中,发动机的主要输入为由整车控制器传来的“开/关”信号、油门开度信号及转速需求,主要输出为转矩、实际油耗与排放及转速;同时,输出的转速作为反馈信号,影响发动机的实际工作状况.

图2 发动机模块图
1.1.1 发动机转矩计算
发动机的工作负荷的主要影响因素有发动机惯性损失和附件负荷,其输出转矩与节气门的开启状态有关.
当节气门开启时:

当节气门关闭时:

式中:Te1为发动机在当前转速下的怠速转矩;Te2为发动机的惯性转矩;Te_req为发动机的需求转矩;Te_max为发动机在当前转速下的最大转矩.

图3 电机效率特性曲线
1.1.2 发动机转速计算
发动机的转速主要考虑了需求转速和发动机最大转速之间的关系,此外还跟离合器的工作状态有关.
当离合器接合时:

当离合器打滑时:

当离合器分离时:

式中:ne为发动机实际输出的转速;ne_req为发动机实际需求的转速;ne_max为发动机的最高转速;ne1为发动机的怠速转速;ne2为上一时间步长发动机转速;Te3为发动机负载所需转矩;Ie为发动机转动惯量.
1.1.3 油耗与排放的计算
HEV燃油消耗的计算是发动机模型中重要的组成部分,通过发动机万有特性实验数据(见图1),发动机的比油耗由式(6)计算获得.

式中:be为发动机的比油耗;B为发动机每小时油耗;Pe为发动机的有效功率.
在 ADVISOR 中,各尾气(HC,CO,NOX,PM)按照式(7)计算.

式中:fHC,fCO,fNOX,fPM分别为发动机热机状态下各尾气的生成率.
同时,ADVISOR中的发动机模块还将气缸体温度对发动机工作性能的影响考虑进去,并对各尾气的生成率进行了修正得:

式中:ε为修正系数,与冷却系状态有关.图2为在Matlab/Simulink环境下基于ADVISOR所建立的发动机模型的模块图[4],包括发动机控制模块、发动机转矩和转速计算子模块、燃油消耗和排放计算模块以及发动机散热模型等.

图4 电机模块图

图5 双模混合动力汽车的整车仿真模型顶层模块示意
1.2 电机模型
电机在双模HEV中既能电动机方式工作,也可以发电机方式工作.目前采用的电机有多种,如交直流电机、永磁同步电机、开关磁阻电机等;不论何种,其内部的物理过程较为复杂,因此在电机模型的建立过程中,重点考虑输入输出特性,以使模型适用于各种电机.通过实验,得到电机转矩、效率与转速的曲面图,ADVISOR中所用电机的效率图如图3所示.电机输出的转矩和电机效率可由式(9)通过插值获得:

同时,电机工作特性受到最大工作转矩的限制:

式中:TMG为电机转矩(N·m);ηMG为电机转速(rad/s);ηMG为电机效率;f(x)为带插值功能的插值函数;TMG_req为电机的目标转矩;TMG_max为电机在当前工作状态下最大的工作转矩.
图4所示为在Matlab/Simulink环境下基于ADVISOR建立的电机模型[4],模型根据转子所需的转矩和转速通过电机控制程序,在参考电动机输出功率MAP图的基础上,计算得到电动机所需的输入功率.

图6 基于Simulink的整车控制器框图
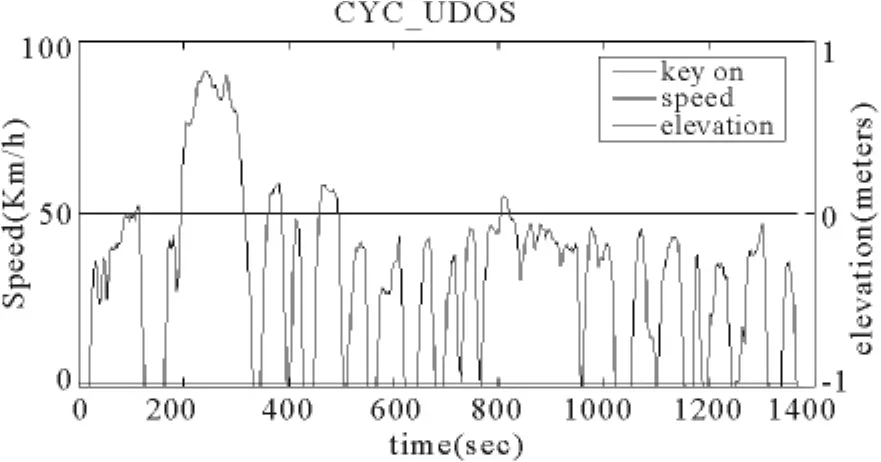
图7 UDDS循环工况

图8 CSHVR循环工况
1.3 整车仿真模型
在Matlab/Simulink中建立动力系统各关键部件模型后,在此基础上,在ADVISOR环境下,通过修改顶层模块,建立双模混合动力汽车的整车仿真模型.该仿真模型的顶层模块如图5所示.在整车模型中包括循环工况模块、车辆模块、车轮模块、主减速器模块、变速箱模块、电机模块、电机控制模块、总线模块、电池组、能量管理模块、发动机模块、排放模块.从左向右的箭头表示为满足当前道路循环下对各个模块能量的需求,从右向左的箭头表示当前汽车各模块的实际输出量,作为上个模块的反馈信息.
2 双模HEV控制策略设计
整车控制器根据发动机油耗MAP图,电池SOC、车速以及车轮出所需转速来决定发动机的最佳转矩和转速.图6所示为整车控制策略原理框图.控制器的输入量主要有:①由driving pattern决定的需求转矩;②由驾驶循环决定的车速;③由电池型号决定的电池SOC;④由发动机型号决定的冷却液温度.输出量主要有:①发动机转矩;②发动机转速;③离合器指令(0或1).
如图6所示,首先由“Need Engine On”模块判断发动机的工作状态,是启动还是熄火;如果发动机启动,由模糊逻辑控制器决定电池组的充电量,此时,发动机发出的功率是需求功率和电池充电功率的总和.然后,选择最佳的变速器工作模式.最后,会对发动机的转速进行优化,在保证需求功率得到满足的情形下使整个系统的效率最大化[5].
3 仿真分析
3.1 双模HEV仿真及结果分析
在本文中,主要以丰田Prius的THS作为参照物,对双模混合动力系统进行仿真,并将仿真结果与丰田THS进行对比分析.
选择传动系统时,以ADVISOR中自带的Prius模型为基础,重点分析了双模混合动力系统关键部件的建模原理建模过程,原模型进行修改后,完成了双模混合动力系统仿真平台的建立.仿真过程中各部件的参数见表1,通过修改M文件实现.
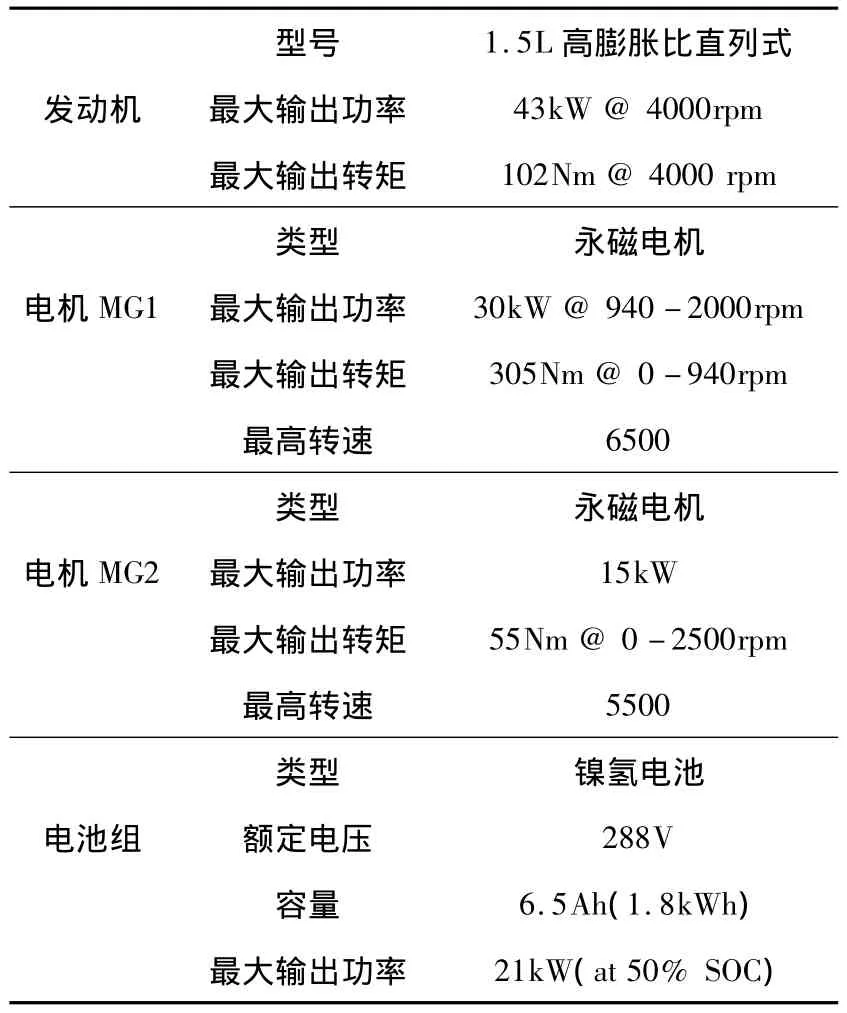
表1 双模混合动力系统仿真参数

图9 CSHVR工况下发动机工作效率图
3.2 仿真工况的选择
目前,世界各国都对车辆的燃油经济性测试和排放性测试制定了详细的标准和法规.车辆排放测试行驶循环工况主要分成以下三类:美国行驶工况(USDC)、欧洲行驶工况(EDC)和日本行驶工况(JDC).分别选取美国环境保护署EPA制定的城市道路循环工况CYC-UDDS(Urban Dynamometer Driving Schedule)和重型车辆城市及郊区道路循环工况CYC-CSHVR(City-Suburban Heavy Vehicle Route)作为仿真工况,其车速与时间的关系如图7和图8所示,仿真工况参数指标[6]如表2所示.
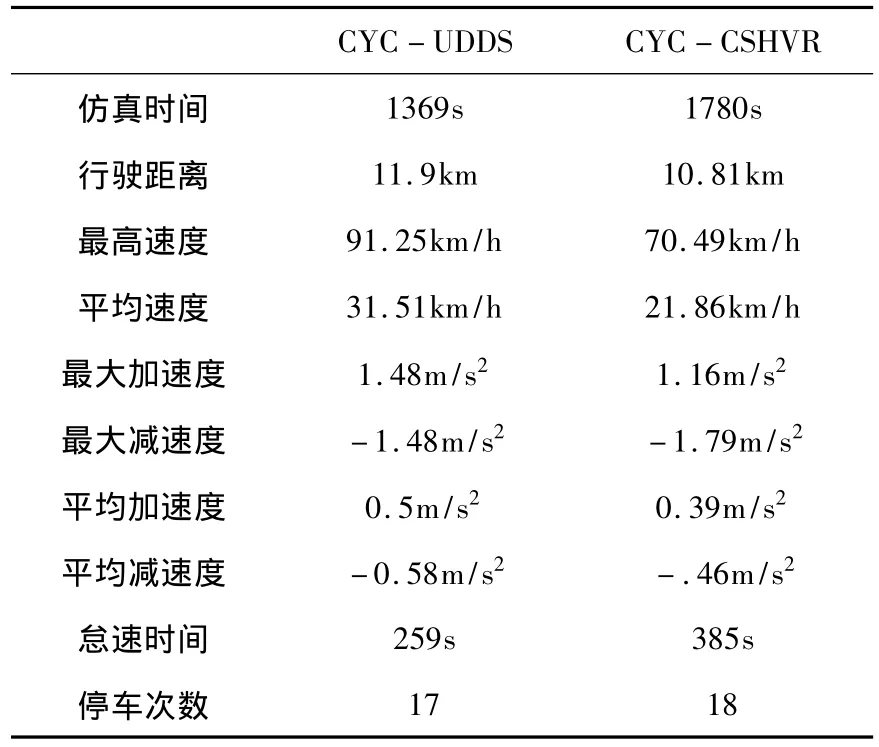
表2 仿真工况参数
3.3 燃油经济性仿真分析
在UDDS和CSHVR工况下分别对丰田THS系统和双模混合动力系统进行仿真,运行结果如表3所示.从下表中可以看出,在UDDS循环工况下,双模混合动力系统较THS系统,燃油经济性有明显改善,百公里油耗改进8%;在CSHVR循环工况下,因为汽车在高速行驶的情况比较多,所以双模混合系统燃油经济性较THS有更加明显的优势,百公里油耗从5.5L降低到4.8L,减少了11%.

表3 UDDS和CSHVR工况下仿真结果
无论是在UDDS工况还是CSHVR工况,双模混合动力系统和THS的排放性能都非常相似,仅有细微的提升.造成这个现象主要有以下两个原因:一是双模混合动力系统在设计之处就以提升整车燃油经济性和动力性为首要目标;二是在制定双模混合动力汽车控制策略的时候,未将排放性考虑进去.但是比较二者的排放性能,双模混合动力系统的仍然在可以接受的范围内.
图9所示为双模混合动力汽车在CSHVR循环工况下发动机效率图,从图中可以看出,发动机基本上一直在高效区工作.
3.4 加速性能仿真分析
基于美国新一代汽车(Partnership for a New Generation of Vehicle,PNGV)动力性的要求[7],分别对双模混合动力系统和丰田THS系统进行了加速性能测试.仿真结果如表4所示.从表中可以看出,双模混合系统有着更好的加速性能,亦即双模混合动力汽车动力性更好.

表4 加速性能仿真结果
4 结论
(1)本文建立了双模HEV整车仿真模型,制定控制策略,并进行了仿真分析.
(2)UDDS循环工况下,双模混合动力系统较THS系统,百公里油耗改进8%;在CSHVR循环工况下,双模混合系统燃油经济性较THS百公里油耗从5.5L降低到4.8L,减少了11%.
(3)基于PNGV动力性要求,双模混合动力系统相比丰田THS系统动力性更好.
[1]Comparative Analysis of Single and Combined Hybrid Electrically Variable Transmission Operating Modes[J].
[2]Halls-Peert,Wilulnetti.车辆动力学[M].北京:北京理工大学出版社,1998.
[3]SzumanowskiAntoni.混合动力车辆基础[M].北京:北京理工大学出版社,2001.
[4]李卫民.混合动力汽车控制系统与能量管理策略研究[D].上海交通大学,2008.
[5]Brooker A,Hendricks T,Johnson V,et al.ADVISOR 3.2 Documention[Z].National Renewable Energy Laboratory,2001.
[6]美国国家环境保护局.http://www.epa.gov/lawsregs/sectors/automotive.html.
[7]Moore T C,Lovins A B.Vehicle Design Strategies to Meet and Exceed PNGV Goals[J].SAE Technical Paper 951906,1995.
猜你喜欢
车主之友(2022年5期)2022-11-23
汽车实用技术(2022年15期)2022-08-19
四川冶金(2018年1期)2018-09-25
上海铁道增刊(2017年3期)2018-01-22
车迷(2017年12期)2018-01-18
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
建筑机械化(2015年7期)2015-01-03
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20