机载拖曳式雷达诱饵干扰分析
2012-06-08 08:40张晓杰骆鲁秦蒋志彪
雷达与对抗 2012年4期
张晓杰,骆鲁秦,蒋志彪,崔 伟
(空军航空大学,长春 130022)
0 引言
在现代以复杂电磁环境为背景的战争中,空中作战是以先进电子技术为基础的最典型的高技术战争。在进攻方式上,空空导弹从1944年出现发展至今己经发展到第四代,具有超视距发射、发射后不管的能力,采用单脉冲跟踪和脉冲多普勒末制导体制的主动雷达制导导弹。在超视距空战中,机载雷达可在上百公里以外就可以发现敌方作战飞机,并发射空空导弹进行攻击。空空导弹上的单脉冲多普勒雷达检测敌机雷达回波信号并分析其相对于发射信号的多普勒频移就可以实现目标的探测和速度测量,通过比较和、差通道的多普勒谱线的幅度或相位就可以实现敌机角度的测量和跟踪[1]。
在防御方式上,作战飞机为了避免空空导弹的攻击,一般都在飞机上装有雷达告警接收机,一旦告警器探测到制导雷达信号,就会向飞行员告警,就可以立即施放各种有源的或无源的诱饵干扰,将对方的导弹诱骗,从而达到保护自身的目的。
1 拖曳式雷达诱饵干扰理论与应用效能分析
据报道,在1999年美国空袭南联盟期间,美国空军B-1B 轰炸机、F-18 战斗机在机后拖放了空中诱饵,至少牵制住了已经跟踪上飞机的10 枚SAM 导弹的攻击,有一个诱饵还准确地被导弹击中,保护了飞机[2]。在现代战争中,拖曳式雷达诱饵已成为干扰雷达导引头的有效手段。
1.1 干扰原理
如果拖曳式雷达诱饵起作用,制导雷达的角度跟踪系统的响应会因诱饵的存在而发生改变。拖曳式雷达诱饵的工作原理与两点源干扰单脉冲雷达的原理相同[3]。由于作战飞机在空战中很难保持和诱饵干扰信号在相位上的恒定,所以在应用上主要是非相干干扰[4]。
1.2 结构组成
拖曳式雷达诱饵主要由机内的信号接收处理部分和机外的诱饵发射部分组成[5]。组成框图如图1所示。

图1 雷达诱饵工作组成结构图
工作流程为:雷达告警接收天线对截获的信号进行威胁信号识别及方位的测量等,然后引导干扰设备尽快地截获威胁信号,通过电子对抗波形发生器产生最佳的干扰样式,最后由光纤传输到诱饵发射出去。
1.3 干扰过程中干信比变化模型
拖曳式雷达诱饵干扰过程中诱饵转发的干扰信号和作战飞机反射的回波信号在雷达导引头接收天线处的功率之比称为干信比[6]。拖曳式雷达诱饵与作战飞机的回波信号不同之处在于诱饵是将接收到的雷达发射信号经过信号处理后放大转发出去。本文所研究的拖曳式雷达诱饵采用恒定功率,即诱饵发射信号的功率恒定,始终以最大功率发射干扰信号。
末制导雷达信号经作战飞机反射后在雷达导引头接收天线处接收到的回波信号功率为

式中,PT为雷达导引头发射功率,GT为目标方向导引头天线增益,GR为目标方向导引头接收天线增益,λ为导引头工作波长,σ为作战飞机的散射截面积,R为目标到雷达导引头距离,γR,γT为雷达导引头发射机和接收机综合损耗。
拖曳式雷达诱饵到达雷达接收机的干扰信号功率为

式中,PTJ为诱饵发射功率,GTJ为诱饵干扰天线增益,GR为诱饵方向导引头接收天线增益,λ为导引头工作波长,Rj为诱饵到雷达导引头的距离,γj为诱饵发射天线的综合损耗。
由公式(1)和(2),可以计算出导引头接收天线处的干信比J/S:

1.4 脱靶量计算模型
拖曳式雷达诱饵干扰末制导雷达导引头的作战态势图如图2所示。

图2 拖曳式雷达诱饵作战态势图
图中,作战飞机的位置为P 点,诱饵位置为Y 点,临界角处导弹所在位置为M 点,飞机与诱饵的拖曳线长度为L=YP,临界角导弹对飞机的入射角度为θm,导弹受到飞机与诱饵的非相干干扰后在临界角处导引头指向Z 点,临界角处导弹指向点与诱饵的夹角为θ2,与飞机的夹角为θ1,导弹到飞机的距离为R,导弹到诱饵的距离为Rj,导弹可修正的误差距离为ZO,脱靶量为OP。
根据图中的几何关系可以得出临界分辨角处导弹距离飞机的距离R为

导弹距离诱饵的距离为

导弹距离瞄准质心的距离为

诱饵对导弹的诱偏距离为

假设在最不利的情况下,在分辨出飞机和诱饵后,导弹将以最大的过载飞向飞机,则可得到导弹最大过载飞行修正的距离[7]为

式中,nmax为导弹的最大过载,g为重力加速度,vm为导弹的速度。
所以,由公式(7)和(8)可以得到导弹最终的脱靶量为

2 拖曳式雷达诱饵干扰仿真和结果分析
仿真条件:假设诱饵发射功率PTJ=60 W,雷达导引头发射功率PT=5000 W,诱饵干扰天线增益GTJ=0 dB;诱饵方向导引头接收天线增益GR=37 dB,诱饵发射天线的综合损耗γj=1 dB,目标方向导引头天线增益GT=37 dB;作战飞机的散射截面积σ=6m2;为雷达导引头发射机和接收机综合损耗γR=γT=1 dB,拖曳线长度L=100 m,导弹速度为vm=900 m/s,飞机速度为vp=300 m/s。
2.1 干信比分析
图3为导弹采用比例导引,导引系数为3,入射角度为45°,导弹到飞机的初始距离R=5000 m时拖曳式雷达诱饵干扰下干信比随导弹到飞机距离的变化曲线。可见,随着距离的接近,干信比会逐渐变小。
图4为在导弹在相距作战飞机1000 m处不同的入射角度对干信比变化的影响。由图可以看出,导弹在前半球攻击或后半球攻击时诱饵都可以起到很好的干扰能力,后半球的干扰效果更好。在前半球入射角度为45°时干信比为7.3,而在后半球135°时干信比可以达到9.5。

图3 干信比随距离的变化仿真图

图4 干信比随分辨角处入射角度的变化仿真图
2.2 脱靶量分析
图5为不同入射角度下拖曳式雷达诱饵干扰对导弹造成的脱靶量曲线。由图可以看出,诱饵对导弹的干扰后半球要好于前半球,若导弹的杀伤半径为30 m。由图可见,后半球的干扰可以保证作战飞机的安全,而前半球只有在入射角度大于45°的范围内可以很好地保证作战飞机的安全。
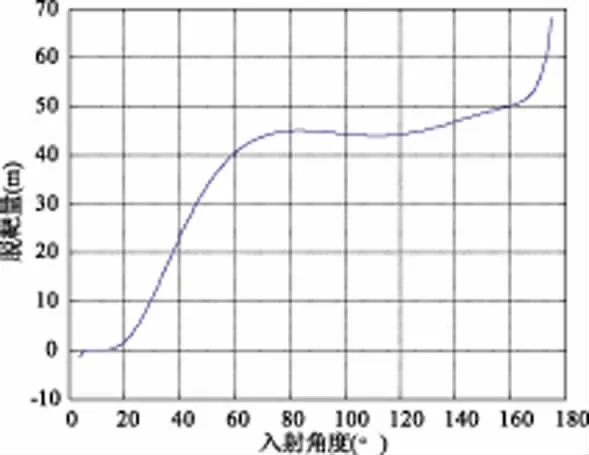
图5 入射角度对脱靶量的影响曲线图
3 结束语
拖曳式雷达诱饵是当前对付单脉冲多普勒雷达的一种有效的干扰方式。拖曳式雷达诱饵能否干扰成功与干信比的变化有很大关系,而导弹、作战飞机以及诱饵的几何位置通过对干信比的影响直接导致了导弹脱靶量的大小。
[1]崔旭.拖曳式雷达有源诱饵干扰技术研究[D].电子科技大学,2005.
[2]何自强.新一代先进诱饵[J].国际电子战,2001(2).
[3]方有培.拖曳式诱饵射频诱饵干扰防空导弹研究[J].航天电了对抗,2001(4):16-19.
[4]姬晓琳.拖曳式诱饵干扰机理研究[D].西安电子科技大学,2010.
[5]BAE SYSTEMS.AN/ALE-55 Fiber-Optic Towed Decoy[J].IEEE Trans.on Aerospace and Electronic Systems,2006(6).
[6]Kerins J W.Analysis of towed decoys[J].IEEE Trans.on Aerospace and Electronic Systems,1993,29(4):1222-1227.
[7]高彬,毛士艺,孙进平.拖曳式诱饵抗单脉冲雷达导引头效能评估[J].系统工程与电了技术,2011(11).
猜你喜欢
科普童话·神秘大侦探(2022年4期)2022-05-26
作文小学高年级(2022年2期)2022-03-03
教育周报·教研版(2021年14期)2021-06-20
物理通报(2020年2期)2020-05-18
中学数学研究(广东)(2019年12期)2019-07-18
弹箭与制导学报(2018年3期)2018-08-28
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11