MIMO雷达测向性能研究与分析
2012-04-25 05:51:48田增彬杜溢智袁湘辉
舰船电子对抗 2012年3期
田增彬,方 标,杜溢智,袁湘辉
(1.海军装备部,北京 100641;2.海军工程大学,武汉 430033)
0 引 言
考虑到地物、障碍等环境因素对目标不同部分散射信号的反射,雷达接收的信号是各多径信号的叠加,具有与通信中角度扩展相似的特性。此外,雷达目标具有明显的闪烁特性,理论和实验均表明,雷达目标在姿态和方向上的微小变化都将导致雷达回波的严重起伏,可达10~25 d B[1]。这种回波信号的起伏十分类似于移动信道的信号衰落,将严重影响常规雷达的探测性能。鉴于雷达回波信号具有某些与移动通信信道相似的特性,将已在移动通信中得到深入研究的多输入多输出(MIMO)概念,延伸应用于解决雷达信号接收和目标探测问题,是近年来雷达研究的一种可行的崭新尝试。
MIMO技术是指在发射端和接收端分别使用多个发射天线和接收天线,信号通过发射端和接收端的多个天线发送和接收,以改善每个用户得到的服务质量。其核心是空时信号处理,也就是利用在空间中分布的多个天线将时间域和空间域结合起来进行信号处理,有效地利用了随机衰落和可能存在的多径传播成倍地提高业务传输速率。
在MIMO技术的基础上,针对传统雷达体制探测存在的不足,美国学者最先提出了MIMO雷达的概念。该体制雷达采用了空间分集(角度分集)与信号分集技术,整个雷达系统可从不同方向对目标进行探测,利用了目标的起伏来改善雷达的性能,较好地克服了目标RCS的角闪烁所带来的性能损失,获得了较大的空间分集增益,从而在信号检测能力上较传统雷达有其独到特点。国际上比较知名的MIMO雷达研究技术方向主要有美国麻省理工学院MIT的林肯实验室提出的发射分集方案和贝尔实验室提出的收发全分集的技术方案[2]。
本文主要讨论MIMO雷达工作于测向(DF)模式时可能达到的最佳性能。在雷达DF系统中,接收机对目标的方位估计是基于目标的反射回波的。为了简化模型,这里作如下假设:
(1)发射信号矢量是复合正态分布的随机变量,存在空间白噪声,并且具有相关矩阵为(1/M)I M的固定功率谱密度;
(2)发射和接收天线阵元都是全向的;
(3)接收信号的独立快拍是可处理的。
1 MIMO雷达测向基本原理
在用于测向的MIMO雷达中,发射天线的间隔需满足对关注目标正交的重要条件,同时接收阵列的单元间隔足够小,以便能进行DF测量[3]。假定目标相对于接收阵列法线的角度为θ0,接收矩阵为K=I Q⊗aT(θ0)。为了照射目标以实现空间分集,发射机上的相移被设置为0°,可得出通道矩阵为:

调节目标矢量α后,接收矢量r为复合的、具有相关矩阵(2M)-1‖α‖2a(θ0)a+(θ′0)+R S/N-1I N的多变量范数,θ′0为发射阵列方位角。
为了更好理解,研究M=2,N=1的特殊情况。该信号模型为:

如果2个天线发射相同的波形,即s1=s2=s,那么接收信号模型为:

由于通道参数a1,2在接收机处是未知的,故不可能利用目标多样性搜索。
因为当Q→∞时,随机变量具有χ2分布,而且它们是独立同分布的(利用g1和g2之间的正交性),所以式(5)中的目标分量具有χ24分布。这是因不同发射天线单元的目标引起了不同和不相关RCS的结果。因此,MIMO雷达最后得到了分集增益。
2 仿真设计与结果分析
2.1 仿真原理
均方误差(MSE)可以用于比较不同系统的性能,系统的MSE取决于具体使用的算法,如最大似然估计、MUSIC算法、波束形成等。本文通过比较无偏估计器的最低边界——克劳美罗界来评价不同系统的性能。
2.1.1 克劳美罗界(CRB)
在 MIMO测向雷达中,接收信号模型[4,5]为:
调节通道参量a,令为1个零均值、方差为(1/M)‖α‖2的复合正态随机变量。
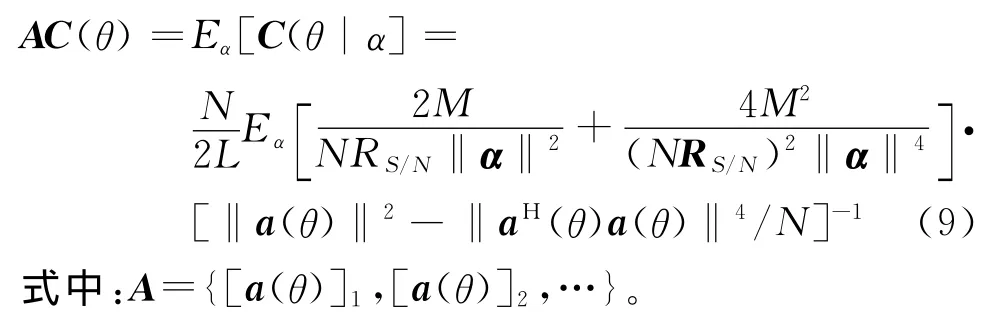
在这个模型中有3个未知的参量:方位参量θ,目标参量α以及信噪比R S/N,令矢量ψ= [θ,R S/N,‖α‖2]以表示各个未知的参量。克劳美罗界(CRB)是无偏估计器的MSE所能达到的最小值,用p(r|ψ)表示接收信号参数的分布,则关于ψ的CRB可表示为:

由于关心的是目标方位θ,所以其它参量对于估计反而成了干扰,通过调节α,可使r为具有相关矩阵 (2M)-1‖α‖2a(θ)aH(θ)+R S/N-1I N的复合正态分布的随机变量。则CRB可表示为:
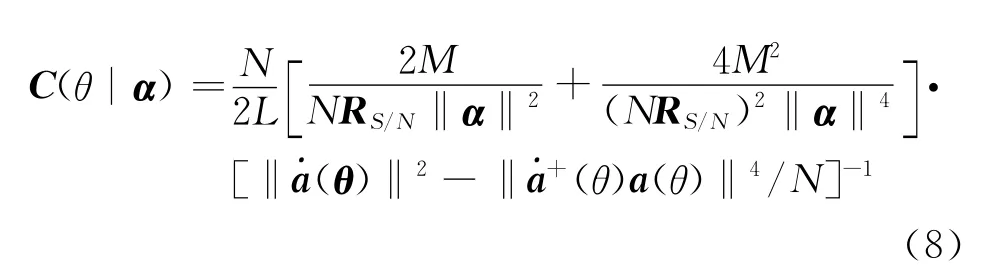
式中:L为阵列估计方位所使用的快拍数。
通过求CRB关于α的均值,可以得到:
2.1.2 均匀线列阵
使用全向接收天线的均匀线列阵,假设有N个接收阵元,阵元间隔为半波长,则第n个阵元的控制向量等效为[5]:

最后,基于式(14)建模、编写 MATLAB程序,进行仿真[6]。
2.2 仿真结果
2.2.1 不同发射阵元数下的性能分析
本节讨论的是发射天线阵元个数对系统性能的影响,假设均匀线性阵列(ULA)接收阵元数N=6,来波方位α′=30°,快拍数L=80,在发射阵元数改变的情况下,独立进行10次实验,分别求出不同阵元数条件下角度的均方根误差,如图1所示。
从图1可以看出,对于MIMO测向雷达,发射天线的阵元数目增加时,系统性能有一定的改善,但对于系统估计的误差影响幅度不是很大。图1所求出的各条曲线基本重合,证实了这一点,即系统对于发射天线阵元数的不敏感性。并且,通过增加发射天线阵元来提高系统性能存在1个下界,即当M的值达到一定程度时,估计误差几乎不再改变。另外,信噪比(SNR)的增大对性能的改善有很明显的作用,但当SNR较大时,它的改善作用不再明显。
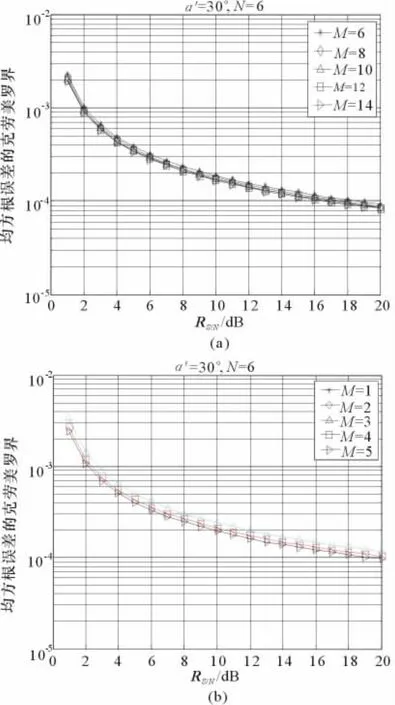
图1 不同发射阵元数下的克劳美罗界
2.2.2 不同接收阵元数下的性能分析
假设ULA发射阵元数M=6,来波方位α′=30°,快拍数L=80,在接收阵元数改变的情况下,独立进行10次实验,分别求出不同阵元数条件下角度的均方根误差,如图2所示。
从图2中可以看出,随着接收天线阵元数目的增加,估计误差随之有较大的改善,但是降低的幅度逐渐减小。同样,信噪比(SNR)的增大对性能的改善也有很明显的作用,但当SNR较大时,它的改善作用不再明显。
在分别讨论了发射阵元和接收阵元数目变化对DF性能的影响之后,接下来对发射阵元和接收阵元数目同时变化时的影响进行仿真。假设来波方位α′=30°,快拍数L=80,在发射阵元数和接收阵元数同时改变的情况下,独立进行10次实验,分别求出不同阵元数条件下角度的均方根误差,如图3所示。
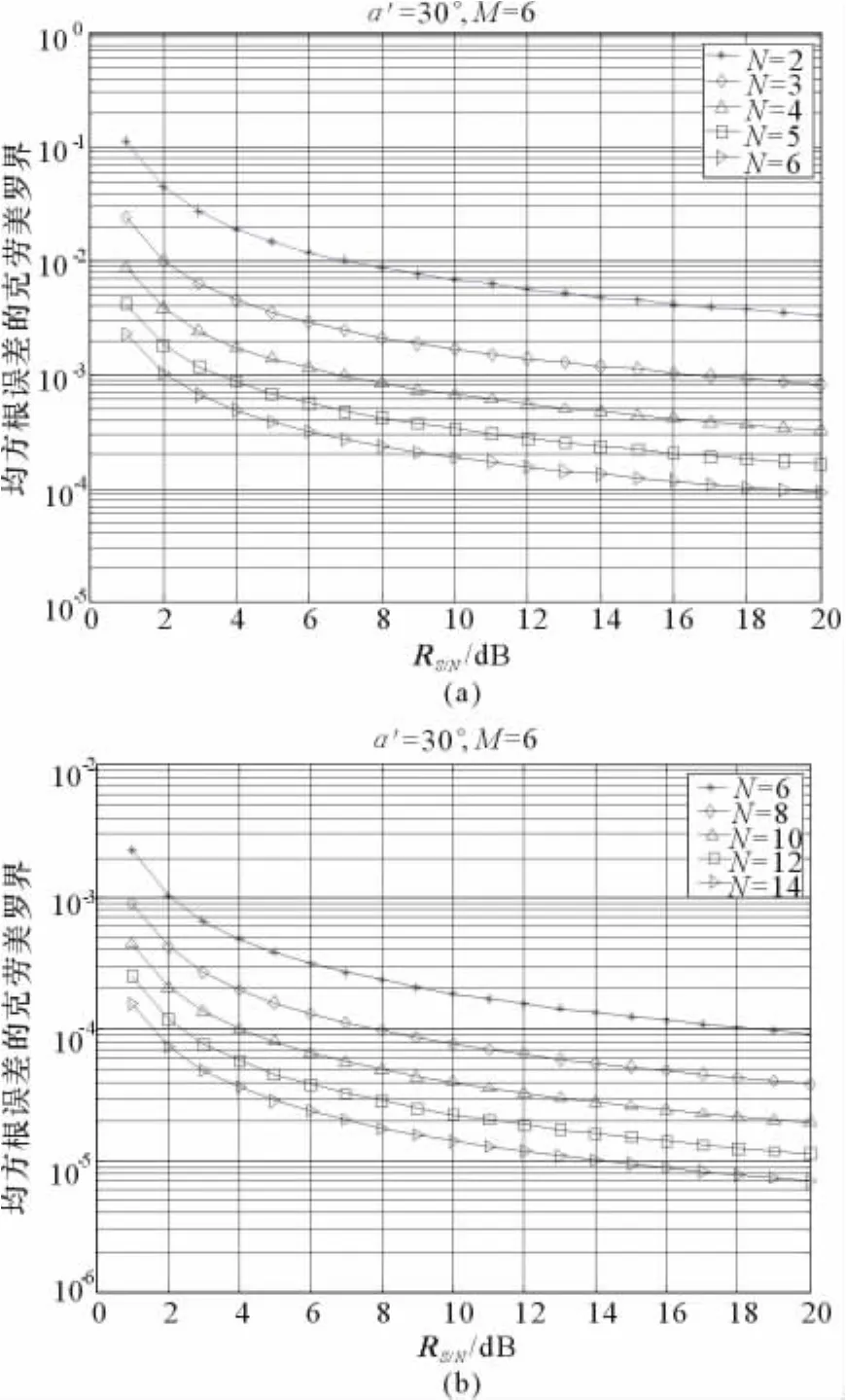
图2 不同接收阵元数下的克劳美罗界
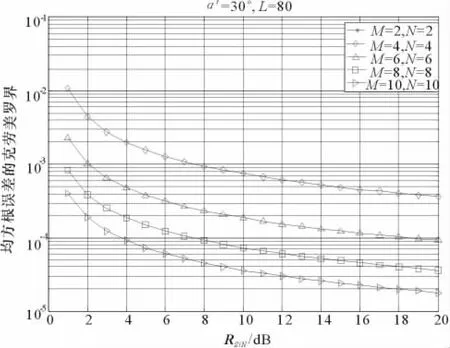
图3 不同发射阵元和接收阵元数下的克劳美罗界
将图3和图1、图2进行比较可以看出,同时增加发射天线阵元和接收阵元数量,可以更加快速地提高MIMO雷达的方位估计性能,当然,也可以看到其在相同阵元数目下改善的幅度是同等的。
2.2.3 不同快拍数下的系统性能分析
假设1:ULA接收阵元数N=6,来波方位α′=30°,在快拍数改变为240的情况下,改变发射阵元数目,独立进行5次实验,分别求出不同阵元数条件下角度的均方根误差,如图4所示。

图4 固定快拍数和接收阵元数下的克劳美罗界
假设2:ULA发射阵元数M=6,来波方位α′=30°,在快拍数改变为240的情况下,改变接收阵元数目,独立进行5次实验,分别求出不同阵元数条件下角度的均方根误差,如图5所示。
将图4、图5与图1、图2比较,可以看出对于发射天线阵元或接收天线阵元数目的变化,当提高快拍数L时,估计精度都相应地变高。为了更加直观地比较L对系统的影响,再做出如下假设:ULA发射阵元数M=6,接收阵元数N=6,来波方位α′=30°,在快拍数改变的情况下,独立进行5次实验,分别求出不同快拍数条件下角度的均方根误差,如图6所示。
通过图6可看出,在发射阵元和接收阵元不变以及来波方向不变的情况下,通过改变快拍数L可以很大程度地改善系统性能,只是当L值很大时,改善的幅度逐渐减小。但是采用这种方法的代价是系统复杂度的增加,因此通常根据实际情况取1个适当的值。
3 结束语
本文对MIMO雷达测向性能进行了仿真分析,验证了基于MIMO体制雷达的优势,通过不同发射天线阵元数、接收天线阵元数以及不同快拍数条件下系统方位估计MSE的克劳美罗界,计算分析了采用MIMO技术带来的雷达测向性能的改善。MIMO雷达作为一个新生事物,尽管目前国际上仍处于概念研究阶段,但它是一种很有发展潜力的新型雷达,值得继续关注和研究。相信在不久的将来,MIMO雷达一定会得到快速的发展。
[1]黄韬,袁超伟,杨睿哲.MIMO相关技术与应用[M].北京:机械工业出版社,2007.
[2]Fishler E,Haimovich A,Blum R.MIMO Radar:an idea whose time has come[A].Radar Conference of Proc.IEEE[C],2004:71-78.
[3]强勇,张冠杰,李斌.MIMO雷达及其应用研究[J].火控雷达技术,2010,39(1):1-10.
[4]明文华,刘志学.一种新体制雷达——MIMO雷达[J].火控雷达技术,2008,37(1):10-13.
[5]Skolnik M.Radar Handbook[M].Third Edition.Newyork:McGraw-Hill,2008.
[6]Liew T H,Hanzo L.Space-time codes and concatenated channel codes for wireless communications[J].Proc.IEEE,2002,90(2):187-219.
[7]Zhu X,Murch R D.Performance analysis of maximum likelihood detection in a MIMO antenna system[J].IEEE Transactions on Communications,2002,50(2):187-191.
猜你喜欢
小学生学习指导(中年级)(2022年9期)2022-09-30 03:15:42
小学生学习指导(中年级)(2022年5期)2022-06-01 03:17:06
小学生学习指导(中年级)(2022年3期)2022-03-29 08:02:36
幼儿园(2021年12期)2021-11-06 05:10:20
小学生学习指导(低年级)(2021年10期)2021-11-01 08:23:06
科技研究·理论版(2021年20期)2021-04-20 01:13:14
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04