机载无源定位精度分析
2012-04-25 05:51:36王喜鹏
舰船电子对抗 2012年3期
王喜鹏,王 飞
(船舶重工集团公司723所,扬州 225001)
0 引 言
无源定位是利用目标辐射源的辐射信息确定出目标位置的一种技术。对地面、海面辐射源的定位常常由机载定位平台来实现,这时通常有几种常用的无源定位方法可供选用[1]:
(1)方位/俯仰定位法;
(2)测向交叉定位法;
(4)多普勒频率差定位法;
(5)相位差变化率定位法。
上述方法中方位/俯仰定位法误差较大,适用于近距离定位。到达时间差定位法需要3个以上观测平台,并且3站之间需要密切协同工作,系统复杂,适用于固定地面多站对空中辐射源的侦察。多普勒定位法虽然定位精度较高,定位时间短;但要求本机运动速度相对较快且侦察设备相对复杂,成本高。因此,机载无源定位主要采用相位差变化率定位和测向交叉定位方法。
1 相位差变化率定位原理
依据运动学原理,在目标与观测平台存在相对运动的条件下,利用观测平台上携载的任意宽开的二单元天线阵(干涉仪),可以获得位置未知的辐射源辐射电磁波的相位差变化率信息(t),此信息中含有威胁辐射源的位置信息;再利用测角系统测得的目标方位角和俯仰角及其时间变化率信息(β,ε,),即可实现对目标的实时交叉定位。
如图1所示,设空中运动平台上的2个天线阵元Ea、Eb接收的来波信息相位差为φ(t),则:

式中:d为阵元间距(即干涉仪基线长);c为光速;f T为来波频率;β(t)为来波方位角;α(t)为Ea,Eb连线垂直方向。
这里假设d远小于空中运动平台与固定威胁辐射源之间水平距离,并且空中运动平台的飞行高度 远小于目标和平台之间的水平距离。
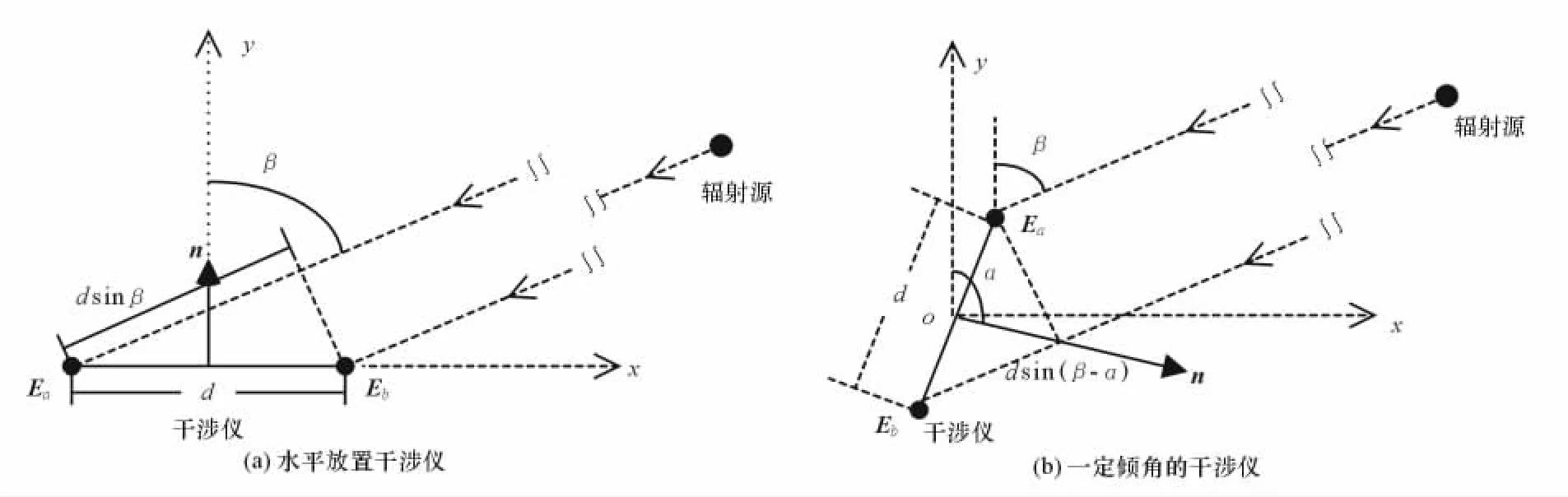
图1 二单元天线阵接收来波相位差信息的几何解释
依据参考文献[2]求得辐射源位置坐标如下:
高校图书馆的基本职能是服务教学、科研,同时也具有推动社会进步、经济发展、文化传承以及全面提升公民素质的公共服务职能.借鉴国外高校图书馆社会化服务的成功经验,结合我国高校图书馆实际,提出我国高校图书馆社会化服务的几种主要模式.

在上式中,除,βi和f Ti外,其余均为可知的运动观测平台的状态参量。所以在测得,βi和f Ti的前提下,即可定出固定目标辐射源的位置(x T,y T)。显然,这是一种即时定位法。因此,只要获得上述测量参数,即可得到目标距离并将目标位置确定出来,而上述测量参数可以通过如下途径得到:
(1)辐射来波到达角βi,可通过干涉仪测向系统获得;
(2)干涉仪相位差变化率,可以通过干涉仪相位差滤波得到;
(3)干涉仪自身的倾角α(t),可以通过机载姿态测量系统的航向角减去干涉仪安装偏角得到;
(4)干涉仪自身的倾角变化率(t),可通过机载姿态测量系统获得;
(6)载机自身的位置 (x Oi,y Oi),可通过机载导航定位系统获得;
(7)辐射源信号发射的频率f T,可通过瞬时测频接收机(IFM)获得。
2 单机无源定位仿真
二单元天线阵(干涉仪)侦收获得位置未知的固定威胁辐射源辐射波的相位差变化率信息,通过与载机位置信息、姿态信息、辐射源方位等参数的综合解算,实现单机对辐射源的快速定位[3]。侦收目标信号的相位差变化速率是影响相位差变化率定位法定位精度的重要参数之一。在其它参数固定的情况下,二单元天线阵的基线长度越长,相位差变化越敏感,测量精度越高,收敛时间越短。
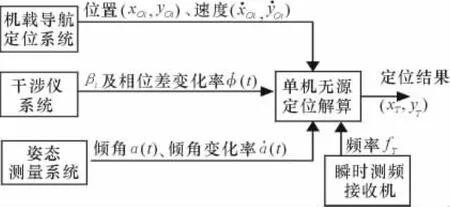
图2 相位差变化率定位原理
设0.8 GHz,18 GHz对应的定位基线长度分别为26 cm和37 cm。根据选定的基线长度、位置误差、平台姿态误差等,对典型辐射源定位进行仿真研究。典型辐射源参数为tPRF=1 ms,波束宽度2°,平台速度为35 m/s。仿真条件及结果如表1和图3所示。
通过仿真可以发现[4]:
(1)减小平台的姿态测量误差,可以比较明显地改善定位收敛速度;
(2)提高平台运动速度,定位收敛速度明显提高;
(3)增加干涉仪基线长度,可以明显提高定位收敛速度。
3 双机无源定位仿真
测向交叉点定位法要求精度较低、定位时间较长,但要求机动运动速度不是很快,且用比较简单的 侦察设备即可完成。
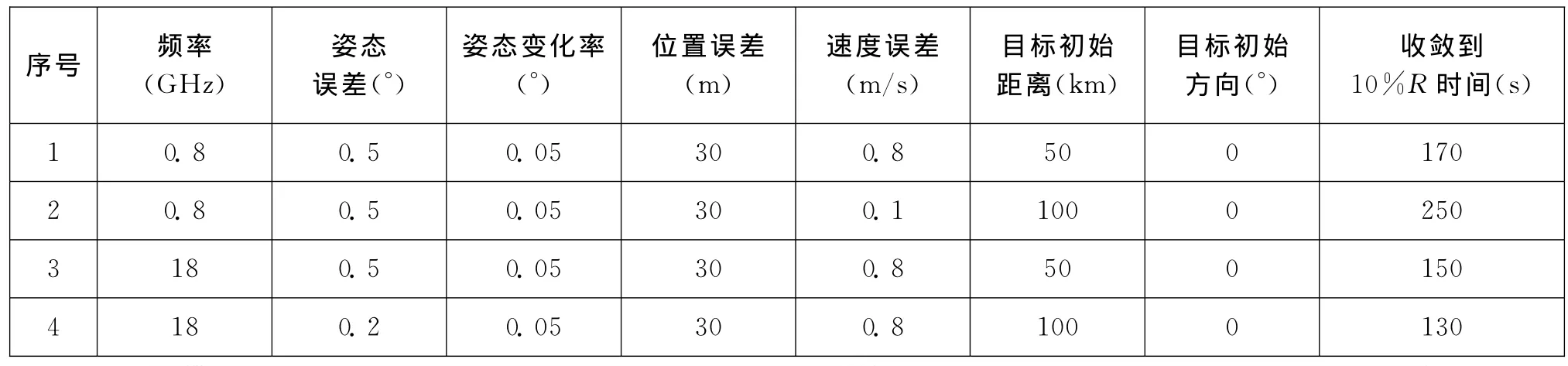
表1 相位差变化率定位仿真参数表
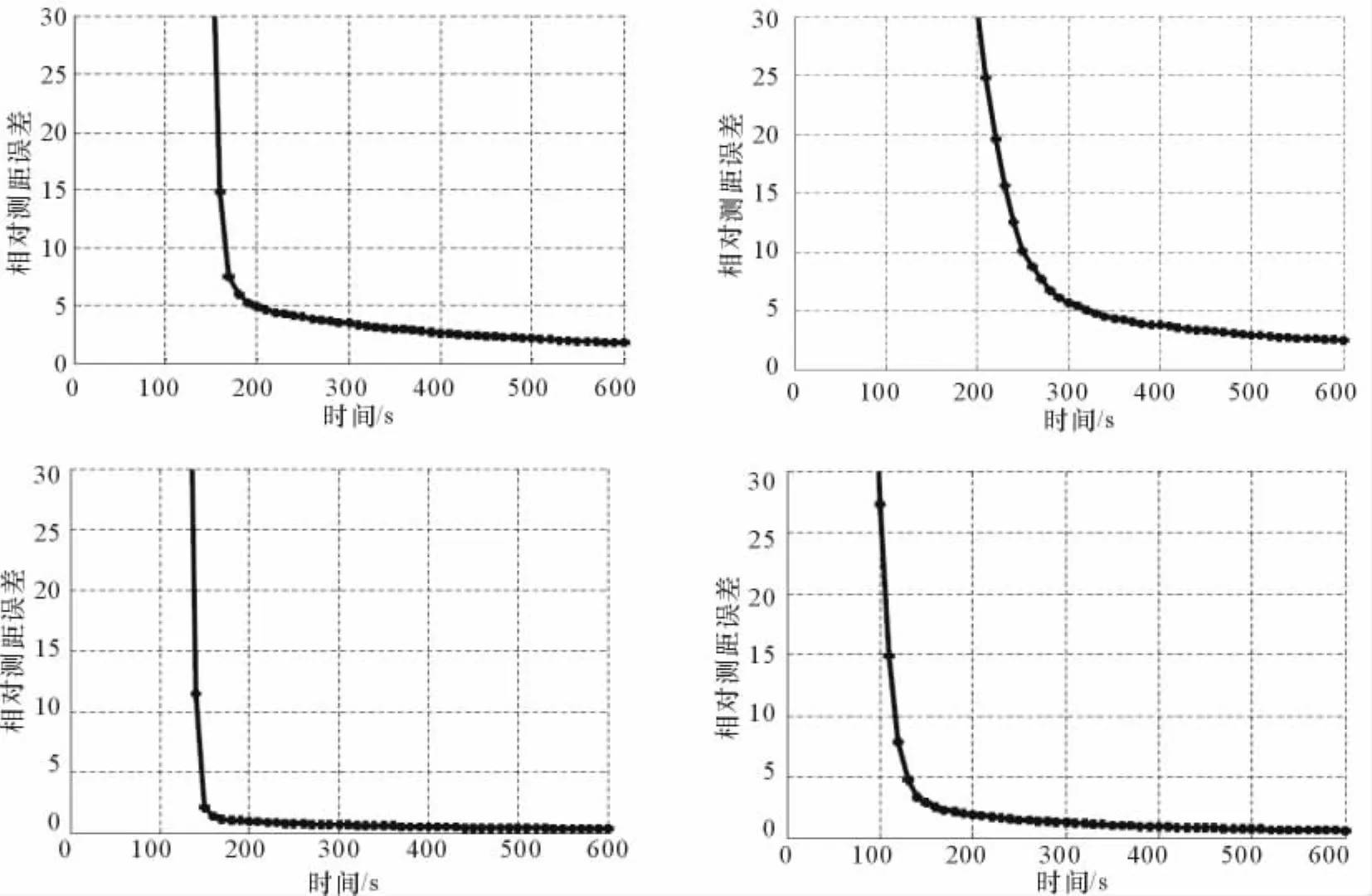
图3 单机定位仿真结果
测向交叉定位法的原理图如图4所示。设有一辐射源位于xoy平面的p点(x,y),在观测点p1(x1,y1)和p2(x2,y2)上同时对辐射源测向,测得的方位角分别为θ1和θ2,2条方位线的夹角为β,辐射源到方位基线的距离为R,2个无人机或单个无人机2次测量点之间的距离为D。假设方位基线与x轴取向一致,根据三角运算,可得下式:
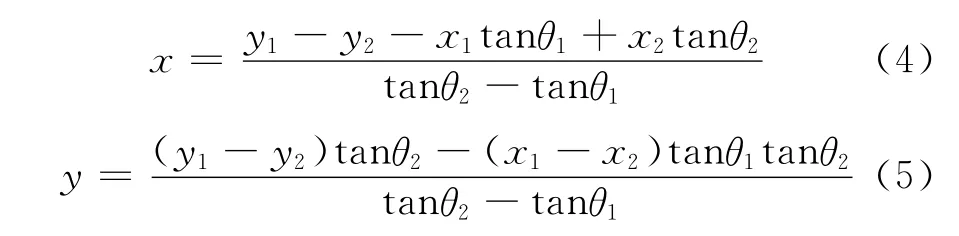
由上式可知,根据侦察站所在位置及辐射源的方位角,即可确定辐射源的位置。
但是,上述公式是在理想的条件下得出的结论,在工程实际应用中,由于系统内部产生的噪声,会出现随机的测向误差,使方位线的交叉点围绕着辐射源的位置呈现随机分布,产生定位模糊区,如图5中的EFGH所示。
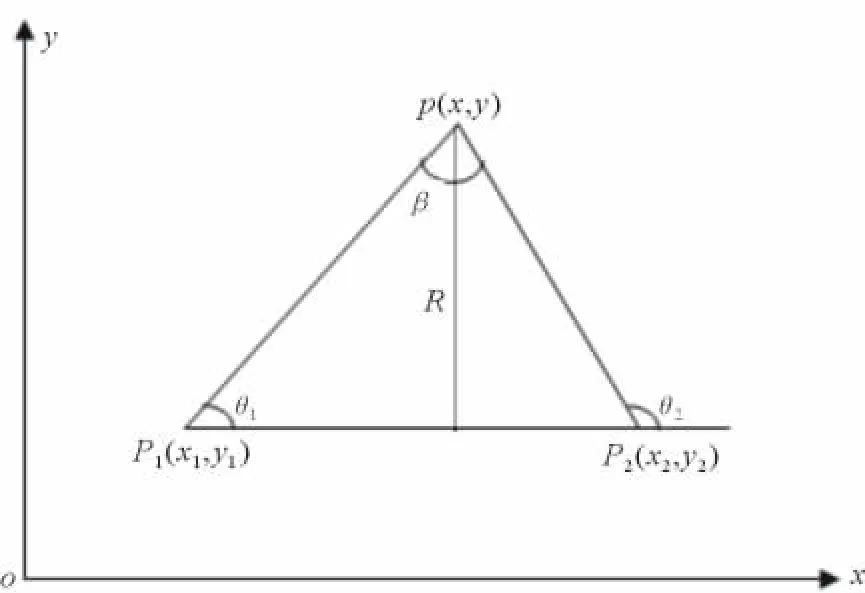
图4 测向交叉定位原理图
定位误差常用均方根误差来估计,均方根误差即位置误差,是指测量得到的辐射源位置与实际位置距离之差的统计处理结果。
图5 误差分析
假设侦察站的测向精度用均方根值σθ表示,那么利用余弦定理及三角运算求得图5中R所对应的σr为:
它表明:接收角θ1、θ2、测向精度以及2次测量时2个机载平台或单个机载平台2次测量点之间的距离是影响定位精度的3个主要因素。图6和图7分别示出了在σθ=1°和2°条件下接收角θ1和θ2的变化对定位精度的影响。
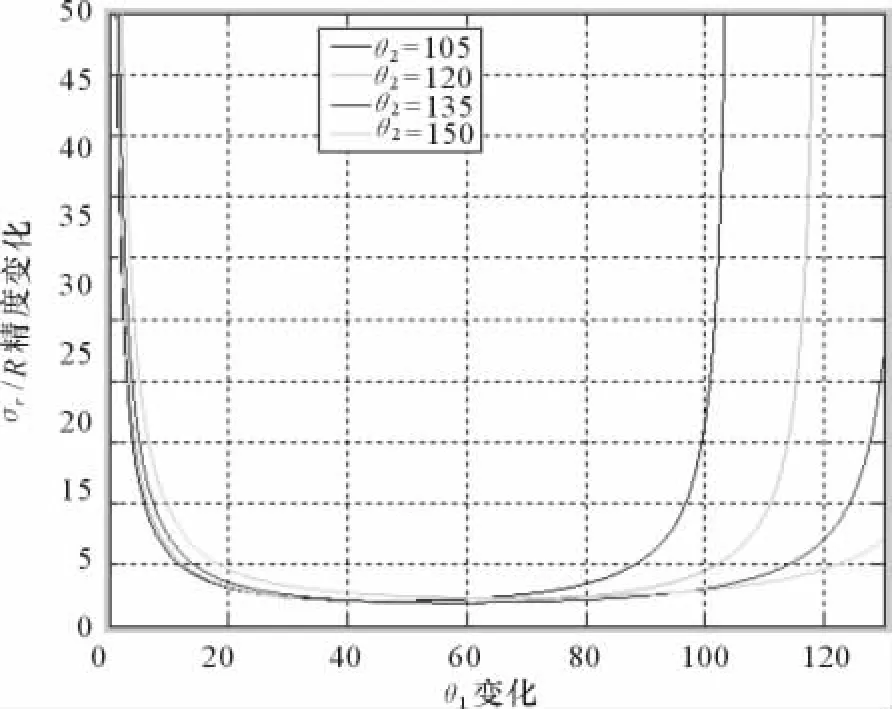
图6与θ的变化曲线(σ =1°)θ
分析式σr及图6和图7可以看出,要提高定位精度,必须做到以下几点:
(1)提高雷达侦察设备的测向精度;
(2)侦察站的地理位置要合理配置,使方位线具有最佳接收角;
(3)侦察站应尽量靠近目标。

图7 与θ的变化曲线(σ =2°) θ
4 结束语
在电子战环境中,使用快速高精度、高识别率的无源被动定位跟踪技术进行战场监视、远程精确打击已成为一种重要的技术方向和发展趋势。通过对单机和双机无源定位原理的阐述和仿真分析,无源定位高精度、高速度的实现主要依赖于参数测量和处理能力的提高,具体包括相位干涉仪测向精度、相位差变化率精确测量、飞机姿态精确测量以及无源定位跟踪算法等。
[1]孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.
[2]单月辉.基于相位差变化率方法的单站无源定位技术[J].国防科技大学学报,2001(6):74-77.
[3]杨建华,陈思兴.国外机载快速无源定位技术最新发展[A].雷达跟踪技术研讨会论文集[C].北京,2001:38-40.
[4]郭福成.基于运动学原理的单站无源定位跟踪关键技术研究[D].长沙:国防科技大学,2002.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
计测技术(2020年6期)2020-06-09 03:27:14
电子制作(2019年12期)2019-07-16 08:45:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
雷达学报(2018年5期)2018-12-05 03:13:16
雷达学报(2018年3期)2018-07-18 02:41:20
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
制导与引信(2017年3期)2017-11-02 05:16:58
电子设计工程(2017年20期)2017-02-10 03:39:23