
海洋石油286船三级动力定位系统设计
2012-04-12 05:09刘喜传
船舶设计通讯 2012年1期
刘喜传
(中国海洋石油总公司,北京 100010)
0 前言
船舶在海洋中所受的外力主要是由风、浪、流等产生的。它们会造成船舶的横移、纵移、垂荡、首摇、横摇和纵摇。船舶动力定位系统即DP系统的基本功能是通过计算机自动或手动控制船上的各个推进器,对抗船舶受到的各种环境外力(风、浪、流和外部作用力等),使船舶保持所预定的位置和首向。随着海洋工程技术的发展,动力定位的应用也在扩大。采用动力定位系统,可使船舶与其他船舶保持相对位置不变、使船舶按预定的轨迹移位、按预定计划的航线以预定航速航行,从而实现船舶自动驾驶、对水下目标进行自动跟踪等功能。由于动力定位系统有定位精度高、提高船舶安全性能和作业安全、可以使船舶智能化、节省能源等优点,因此被广泛应用于大型海工装备上,在多用途工作船、科研调查船等船舶上也有较多的应用。
海洋石油286船是深水多功能水下工程船,能在深海恶劣海况下进行大型深水水下结构物安装、软管铺设、锚系处理和潜水支持作业,配置了三级动力定位系统,具有在风、浪、流的作用下无须借助锚泊系统而是利用自身的推力系统便可使船舶保持预定的位置和首向或者按照预定的轨迹运动,大大提高了船舶在恶劣海况下作业的可靠性、安全性和准确性。本文介绍了船舶动力定位系统的原理和组成,并从配电系统和电站管理等方面就海洋石油286船上三级动力定位系统电站的设计进行了阐述。
1 动力定位系统原理

图1 动力定位系统原理框图
典型的动力定位系统控制原理图如图1所示。动力定位船舶在海上所受的环境外力来自于风、浪、流等。在这些外力的作用下,船舶会产生位置、首向等状态的变化。这些状态的变化可以被动力定位系统的传感器系统探测到,如位置参照系统探测位置的变化,罗经系统探测首向的变化。这些信息传输到动力定位计算机系统。动力定位计算机系统首先计算出船舶的位置和首向的设定值与实际值之间的偏差数值,然后计算出消除这些偏差所需要的船舶推力器的推力,并向船舶的各个推力器发出控制信号,最优化地给每个推力器分配推力任务,以使实际值和设定值之间的偏差在作业允许的范畴内。风速和风向传感器探测船舶所在位置的风速和风向作为前馈输入至计算机系统,以提高系统的响应速度。动力定位系统可以控制船舶在三个自由度内的运动,即横移、纵移和首摇。
动力定位计算机系统的核心是船舶动力定位数学模型,数学模型描述了船舶在外力和本身推力的作用下如何运动,反映了船舶本身的水动力性能。数学模型通常使用卡尔曼滤波技术不断进行修正,给出控制的推力指令。
2 海洋石油286三级动力定位系统
2.1 动力定位系统的基本构成
国际海事组织IMO根据动力定位系统的设备和系统的冗余度,按照是否允许设备和系统有单个故障以及单个故障的范围,按动力定位系统在规定的环境条件下以及作业范围内自动保持船舶的位置和首向的能力。将动力定位系统分为三个等级:一级、二级和三级。各个船级社参照IMO的定义和要求均在各自的规范中有单独的章节描述动力定位的要求。
动力定位一级:适用于无故障条件下运行,也就是说在发生故障后,船舶就可能失去保持船舶位置的能力。
动力定位二级:在出现单个故障后,但不包括舱室进水或失火的故障,船舶仍能保持船舶位置的能力。单个故障包括发电机组故障、推进器故障等,一般采取冗余替代的方法实现。发电机组的冗余更突出地反映在柴油机及其辅助系统包括燃油、滑油、冷却水、空气系统的冗余设计上。推进器的冗余同样不仅仅针对推进器本身,也反映在其辅助系统包括滑油、操舵、冷却水等辅助系统以及驱动系统,包括推进电动机、推进变频器、辅助电源、冷却系统和转速控制等。
动力定位三级:除了要满足上述动力定位二级的冗余要求外,还要满足在任何一个舱室进水或失火的故障下,仍能保持船舶位置的能力。所以要求相关设备的布置应具有A-60级防火分隔的要求,水线以下的设备分隔还需满足水密分隔要求,包括发电机组、配电板、动力定位控制站等的布置需满足分隔要求。
海洋石油286船是深水多功能水下工程船,配置了三级动力定位系统,申请了挪威船级社(DNV)和中国船级社(CCS)两个船级社的三级动力定位船级符号,需满足DNV规范DPS 3和CCS规范DP-3动力定位的要求。三级动力定位意味着船舶可以承受任何一个舱室,包括一个机舱由于火灾或进水导致的系统故障,仍具有保持船舶位置的能力。
海洋石油286动力定位控制系统使用挪威康士伯公司生产的K-Pos DP-22和DP-12系统,K-Pos DP-22作为主控制系统,K-Pos DP-12作为备用控制系统,两系统的设备布置满足DP-3分舱要求。动力定位控制系统方框图如图2所示。
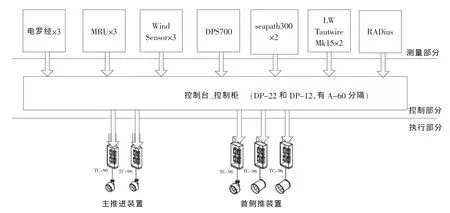
图2 海洋石油286船动力定位控制系统方框图
海洋石油286动力定位主控制系统K-PosDP-22控制计算机两套布置于驾驶室后驾控台上。该区域作为动力定位主控制中心。备用控制系统K-Pos DP-12控制计算机一套布置于驾驶室左翼控制台,驾驶室左翼控制台区域作为动力定位备用控制中心。动力定位备用控制中心与主控制中心都布置在驾驶室内,但设有A-60分隔。
为船舶提供位置参考信息的定位装置有高精度DGPSDPS700。DPS700包括有一套GPS天线、一套GPS/Glonass天线、处理器DPS132和DPS232以及差分信号接收天线。设两套张绳器用于500m水深以内定位,另设两套水声定位系统HiPAP和一套无线电定位系统RADius。为船舶提供首向信息的电罗经设有三套。Seapath300系统设有两套,该系统既能向动力定位控制系统提供位置信息,也能向动力定位控制系统提供首向信息。设置三套船舶运动传感器MRU5向动力定位控制系统提供船舶运动及趋势信息,三套风速风向传感器提供船舶所在位置的风速风向信息。以上两套或多套传感器与测量系统中的一套系统连接至备用控制系统,且与另一套系统尽量设有分隔和/或保护,以防止导致两套或多套系统一起发生故障。
在良好的海况和气象条件下,该系统的定位精度为:距离设定的船位小于0.5m;在风速为24m/s、浪高9m、海流1.5 kn时,系统的定位精度为:距离设定的船位小于3m。由于动力定位涉及全船的推进器和测量系统等,因此最终的定位精度还要取决于相关设备的精确度、可靠性和响应时间。
2.2 动力定位操作对电站的要求
船舶电站系统包括发电系统、变配电系统和电站管理系统。发电系统包括发电机和原动机以及为其服务的辅助系统,如燃油系统、滑油系统、冷却水系统和排气系统等;配电系统包括主配电板、辅助配电板、分配电板和变压器等。对于三级动力定位系统,要求发电系统、变配电系统和电站管理系统需要有冗余,并且需满足A-60分舱要求,即一个舱室由于失火或进水从而导致整个舱室失去后,剩余的发电系统、变配电系统和电站管理系统仍能为推进器提供电力以满足定位要求。
海洋石油286设有前后两个机舱,每个机舱安装两台3 850 kW柴油发电机组和一台2 885 kW柴油发电机组,总装机容量为21MW。主要用电负荷包括:安装在船尾部的两台4 500 kW全回转推进器,安装在首部的两台2 200 kW管道式侧向推进器,安装在首部一台2 200 kW可伸缩式全回转推进器,总的推进器装机容量是15.6MW。电力系统单线图如图3所示。发电系统采用6 600 V、50Hz中性点高阻接地系统,推进电动机采用690 V变频驱动系统,机舱和甲板辅助机械采用400 V中性点绝缘系统,主起重机等工程作业设备采用690 V中性点绝缘系统。

图3 海洋石油286船电力系统单线图
DNV规范对三级动力定位电站的操作要求是用于提供冗余的汇流排连接断路器在动力定位操作时需要断开。对于海洋石油286船要求图3所示的两个6 600 V汇流排连接断路器和所有低压配电板汇流排连接断路均需断开,即实际上形成两个电站系统。每一个电站系统设有电站管理系统。电站管理系统的首要功能是保证供电的连续性。电站管理系统对发电机组和配电系统的电压、频率和功率进行监测。为防止电网过载,当监测到电网过载时,如还有备用发电机组,则自动起动备用发电机组、并网供电和调频调载,当没有备用发电机组时,则分级切断非重要的负荷;当一台发电机组突然发生故障而失去供电时,动力定位控制系统降低推进器的功率以降低电网功率,防止电网过载而导致电网断电;当一个电站所在的舱室发生失火或进水而导致该电站失去供电能力时,船舶将失去该电站的三台发电机组、两台推进器等,这是海洋石油286三级动力定位系统最严重的单个故障,在这个最严重的单个故障发生后,另一个电站系统仍能提供足够的电力供给剩下的三台推进器用于定位,从而保证供电的连续性和定位工作的可靠性。无论是在起重工况、铺设软管工况还是在锚系处理等工况下,动力定位系统供电的优先级都要高于其他负荷,其目的是首先保证船舶位置和首向。
3 结语
船舶动力定位系统是先进的船舶海上定位技术,与传统的锚泊定位方式相比,具有不受水深限制、定位精确、机动性强等优点,对于我国深海海洋油气田开发具有重要意义。海洋石油286作为深水多功能水下工程船,承担深水水下结构物安装、软管铺设、ROV支持、饱和潜水支持、锚系处理等作业任务。由于船舶动力定位系统的应用,故使该船的各项功能使用得到充分的保障。该船的建成必将为我国深海海上油气的开发生产发挥重要的作用。
猜你喜欢
山东冶金(2022年4期)2022-09-14
中学生数理化·中考版(2021年12期)2021-12-31
舰船科学技术(2021年12期)2021-03-29
建材发展导向(2019年5期)2019-09-09
当代陕西(2018年12期)2018-08-04
通信电源技术(2016年4期)2016-04-04
学习月刊(2015年10期)2015-07-09
新疆钢铁(2015年3期)2015-02-20
中国设备工程(2014年1期)2014-02-28
中国船检(2013年10期)2013-08-15
