
智能消防机器人系统的开发*
2012-03-17 10:33黄丛生陈芳浩黄红霞
湖北理工学院学报 2012年4期
黄丛生 史 洋 陈芳浩 黄红霞
(1湖北理工学院电气与电子信息工程学院,湖北黄石435003; 2山东理工大学,山东淄博255049)
0 引言
随着人工智能技术的不断发展,机器人救援已经从实验室渐渐进入了人们的视野,特别是在消防工作领域,机器人救援越来越受到人们的关注。本文旨在设计一款消防机器人系统,以提高消防灭火的安全性和效率[1]。系统由消防机器人和控制中心组成。消防机器人选用高性能、低功耗的 STC12C5A60S2单片机[2]作为主控芯片,采用 DS18B20温度传感器和MQ-2烟雾传感器作为环境感知器件,采用NRF905通信模块收发数据。消防机器人能将采集到的信号进行综合判断和处理,并控制通信模块与控制中心进行数据交流,接收控制中心指令并采取相应行动。
本消防机器人系统的研究目的主要是研发一款廉价且具有实战效力的消防机器人,而且依靠其通用的底盘设计,只需换上其他传感器,则可实现视频传输、战场侦察等功能。
1 系统结构
消防机器人系统由消防机器人和控制中心组成。其中消防机器人包含温度检测模块、烟雾检测模块、动力模块、喷水消防模块和无线通信模块,控制中心包含LCD显示模块、输入模块、无线通信模块。智能消防机器人硬件系统如图1所示。
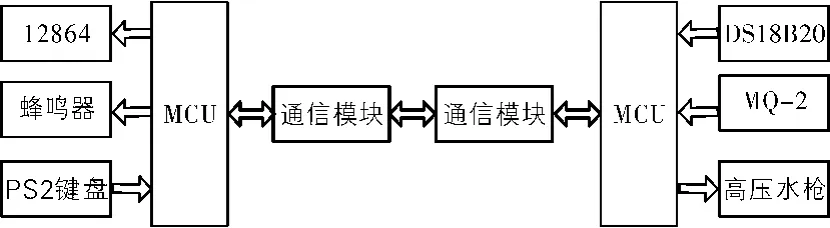
图1 智能消防机器人硬件系统
本系统以STC12C5A60S2单片机为控制核心,以NRF905芯片为通信模块。单片机读取温度传感器和烟雾传感器的数值并打包发送给NRF905,由NRF905将数据发送至控制中心的LCD液晶显示屏上,并实时接收控制中心的输入指令,做出移动或灭火动作。
2 硬件电路设计
2.1 烟雾浓度检测电路
烟雾浓度检测电路由 MQ-2烟雾传感器、LM 324 运算放大器组成,通过STC12C5A60S2单片机内部AD采样获取烟雾浓度值。图2为烟雾浓度检测电路。为了使系统获得烟雾浓度极小的变化值,并获得更准确的现场温度,在MQ-2输出端构建了一个单电源的比例放大电路。运放电路放大倍数Af可用下式(1)计算[3]:

根据公式(1)可以算出该电路的放大倍数大约为6;实际的放大倍数为5~10倍。
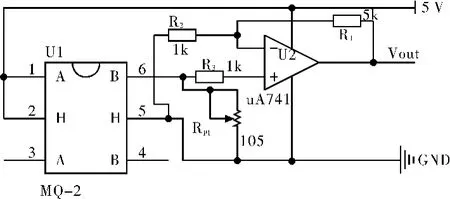
图2 烟雾浓度检测电路
2.2 无线通信模块
NRF905是挪威Nordic公司推出的单片射频发射器芯片,由一个集成的频率调制器、一个带解调器的接收器、一个功率放大器、一个晶体震荡器和一个调节器组成,可以很容易通过SPI接口进行编程配置。
采用AMS1117稳压芯片为NRF905芯片供电,使该模块能够适应火灾现场等相对较恶劣的场所,最大限度地减小误差和保证系统的稳定性[4]。
在发送状态,单片机将接收节点地址 TX-address和有效数据TX-payload通过SPI接口传送给NRF905,并将TRX-CE和TX-EN置成高电平使它进入低功耗工作模式,将获得的数据加前导码和 CRC校验码,通过曼彻斯特编码方式将数据包发送出去。如果AUTORETRAN拉高,NRF905将连续发送数据包,直至TRX-CE被置低,这时NRF905结束数据传输,并将自己设置成STANDBY模式。
在接收状态,单片机通过置高TRX-CE,置低TX-EN 650μs后进入低功耗接收状态,检测空间信息。当发现与接收频率相同的载波时,载波检测CD置高;当地址数据有效时,地址匹配AM置高;当接收到有效数据包时,NRF905会自动去掉前导码、地址码和CRC校验码。数据准备就绪时,DR位将被置高,单片机设置 TRX-CE为低电平时进入低电流模式,单片机可以通过SPI总线接口读取相关数据。当所有数据读取完毕后,NRF905再次将AM、DR置低,准备进入下一个工作状态。
2.3 消防模块
消防机器人灭火模块摒弃了传统风扇式灭火装置,根据水泵原理,设计了水箱加压装置,其装置原理图如图3所示,所有齿轮均可自由转动,1,2,3齿轮用三角带固定,所围三角形中心接小型电机。当机器人接到相应指令时,启动电动机,由于各齿轮转向一致,给水管一定的定向压力,促使水加压喷射,有效射程为3 m。
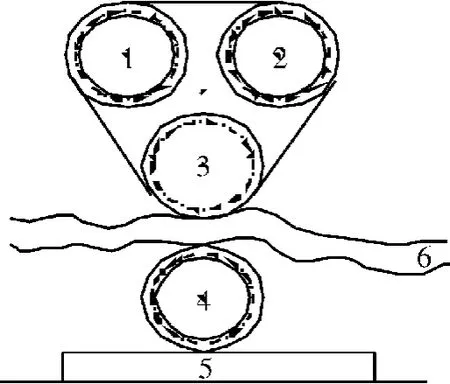
图3 水箱加压装置原理图
3 软件设计
所有程序均以子模块的方式进行设计,这样便于设备的维护和系统的升级,系统流程图如图4所示。

图4 系统流程图
当指挥模块接通电源,系统初始化完毕后出现Windows开机界面,输入正确密码,进入指定系统。若密码输入错误,则仍停留在密码输入界面上。进入系统后,选择相应指令,“1”为显示指令,进入后可显示机器人从现场发回来的相关数据,包括温度、烟雾浓度等相关数据。“2”为修改指令,可修改指挥中心电子时钟的数值及火灾报警器的上限值。如果读取数据大于该值,则报警;小于该值系统不运行。B为返回指令,发射程序较为简单,即单片机不断读取相关传感器数据,并通过NRF905发射模块将数据发送至指挥中心。
4 数据分析
对NRF905采集到的火灾现场的温度进行了26次采样,并与实际的温度进行对比,绘出温度对照曲线,如图5所示。

图5 温度对照曲线
图5中实线代表实际的温度值,虚线代表采集到的温度值。利用MATLAB软件计算出两者相关参数为0.98,接近于完全相关系数1,说明该系统的测温模块工作正常且能提供准确的现场数据。
5 结论
设计并实现了一种基于 STC12C5A60S2单片机的智能消防机器人系统,样机如图6所示。本系统的创新点在于使用 NRF905通信模块进行数据传输和控制指令的交流,其强大的信息传输功能可以实时为消防人员提供火灾现场精确的温度、烟雾浓度等数据,以便更好地了解火情。其自带的消防系统灭火装置具有成本低廉、反应时间短、灭火效率高等优点,可协助消防人员完成灭火工作。经测试,本系统在半径为300 m的范围内信息传输良好,系统工作稳定。其模块化的硬件接口设计可为机器人自动寻找火源、远程视频传输以及立体喷水、灭火等提供一个良好的硬件平台和扩展空间,具有一定的应用价值。
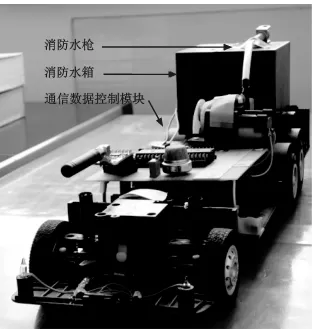
图6 消防机器人样机
[1] 克莱格.机器人学导论[M].北京:机械工业出版社,2006:255-258
[2] 陈桂友.单片微型计算机原理及接口技术[M].北京:北京航空航天大学出版社,2001:89-93
[3] 张玫.机器人技术[M].北京:机械工业出版社,2011:98-100
[4] 陈圣林.图解传感器技术及应用电路[M].北京:中国电力出版社,2009:86-90
猜你喜欢
小学阅读指南·低年级版(2021年3期)2021-03-19
电子制作(2019年13期)2020-01-14
华人时刊(2019年13期)2019-11-26
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
测控技术(2018年5期)2018-12-09
当代陕西(2017年12期)2018-01-19
电信科学(2016年10期)2016-11-23
科技传播(2015年20期)2015-03-25
电子设计工程(2015年15期)2015-02-27
