基于蚯蚓蠕动机理的仿生机器人研究进展
2012-03-14 09:11:36简小刚王叶锋杨鹏春
中国工程机械学报 2012年3期
简小刚,王叶锋,杨鹏春
(同济大学机械与能源工程学院,上海 201804)
仿生机器人是机器人技术领域中一个新兴的发展分支,是当前的研究热点.近10年来,对低等生物如尺蠖、水蛭、蛇、鳗、昆虫、甚至寄生虫等在复杂环境下的有效运动机制的研究,尤其得到了国内外诸多学者的重视.这些研究结果具有重大的应用价值,其典型应用领域至少有急救机器人技术、工业上的管道检测以及医疗上的内窥镜领域.基于蚯蚓蠕动机理的仿生机器人,由于其结构简单、耗能少、驱动力大,特别适应柔软、弯曲环境下的运动,因此在上述诸多领域中得到了良好的发展与应用.
1 蚯蚓蠕动机理
蚯蚓属于无脊椎动物环节门,是一种典型的土壤动物,外形及其解剖示意图如图1所示.整体为圆柱形,首尾对称,外部分节.蚯蚓身体外层有环肌6,内层有纵肌5,体表有刚毛12,血管11,14,15,17和神经线13分布在肌肉和体腔9之间.
蚯蚓的蠕动过程分为4部分(见图2):①第一节纵肌收缩,环肌舒张,体节缩短,刚毛伸出;②第二节纵肌舒张,环肌收缩,刚毛收回;③第二节纵肌收缩,环肌舒张,体节缩短,刚毛伸出;④第一节纵肌舒张,环肌收缩,刚毛收回.

图1 蚯蚓的解剖示意图Fig.1 Schematic diagram of earthworm dissection

图2 蚯蚓的运动原理Fig.2 Locomotion principle of earthworm
根据蚯蚓蠕动机理设计的仿生机器人(至少2节体节),其运动原理一般如图3所示,过程如下:① Ⅲ收缩,Ⅰ,Ⅱ紧缩,机器人处于初始状态,如图a所示;②Ⅱ胀紧,如图b所示;③Ⅲ伸长,如图c所示;④Ⅱ紧缩,Ⅰ胀紧,如图d所示;⑤Ⅲ收缩,如图e所示;⑥Ⅰ紧缩,如图f所示,机器人回到初始状态.
经过①-⑥的过程,机器人整体向前运动一个步距h.重复上述过程,机器人将运动一定的行程.反之,机器人将向相反方向运动.

图3 仿蚯蚓蠕动机器人运动原理Fig.3 Locomotion principle of earthworm-like robot
2 仿蚯蚓蠕动机器人的研究现状及不足之处
2.1 医疗
基于蠕动机理的自主内窥镜机器人最早由IKUTA提出,之后许多科学家研究出各种微型内窥镜机器人.国外方面,意大利CRIM(Center of Research in Microengineering)以气动方式驱动研制出几代内窥镜机器人[1];GLOZMAN等提出一种能够胀缩的自推进式仿蚯蚓内窥镜机器人[2],如表1所示.
国内方面,迟冬祥等介绍了一种基于蚯蚓运动原理的微小机器人内窥镜原型[3],其外形微小,可以轻松穿过肠道的最狭窄处.机器人各单元之间由2自由度的铰链连接,可以适应蜿蜒盘曲的肠道.王坤东等开发了一种直径6mm的仿蚯蚓多关节蠕动微机器人样机[4],机器人使用十字万向节连接直线驱动器,在弯曲腔道中能自适应改变自身姿态.

上述几种内窥镜机器人的研究中,主要采用气流作为驱动方式.然而,气流驱动方式由于其特殊的运行机理,机器人外径不可能太小,而且靠扩张的方式行走会引起患者的不适甚至痛苦.
2.2 微型管道检测
目前,国内外对工业上微小的、特殊管道空间内的检测及维修还刚起步,但该类管道在各个领域应用广泛,故研发微型管道机器人极具吸引力,相继成为国内外研究的热点.
国外方面,意大利CRIM研制了形状记忆合金(SMA)驱动的仿生蚯蚓[5];韩国理工学院研制了SMA驱动的仿蚯蚓微机器人[6],见表2.国内方面,马建旭等提出一种适用于微管移动的仿蚯蚓蠕动式微机器人[7].

?
上述介绍的微型管道机器人主要采用SMA作为驱动器,其步距较小,长度变化范围有限;响应速度较慢,要提高其反应速度,需外加冷却系统;负载能力较小,很难实现机器人的转弯运动.
2.3 曲线孔加工
曲线孔在现代工业中有着广泛的应用前景,例如在注塑模具中开出这样的孔,可以改善冷却效果,提高注塑精度.然而,现有的加工技术仅能加工直孔或简单的弯孔,对复杂的空间曲线孔无能为力.
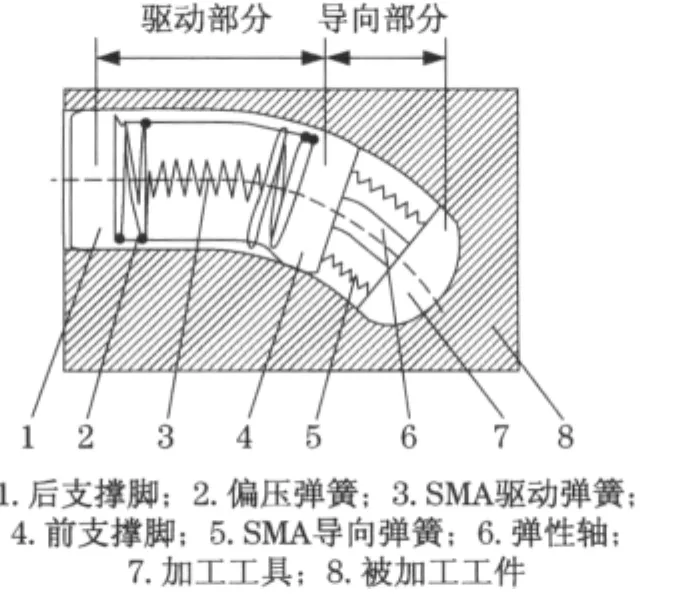
图4 机器人工作原理Fig.4 Working principle of robot
日本三菱电气公司、电气通信大学等先后采用SMA弹簧驱动,开发出一种曲线孔电火花加工机械装置.但该装置仅能加工曲率半径较大的曲线孔,且在加工较长曲线孔时,工作液循环及电蚀产物排除较困难,加工稳定性差,生产率低.
贾宝贤等研制出一种仿蚯蚓式电火花加工机器人[8],如图4所示,主要由驱动和导向两部分组成.驱动部分包括SMA弹簧3、偏压弹簧2和前后支撑脚1,4,带动机器人作微步蠕动前进或后退.导向部分包括前支撑脚4、弹性轴6、工具电极7和4根均布的SMA弹簧5,通过控制SMA弹簧5的变形量,可使导向部分在不同方向产生不同曲率半径的弯曲.此外,美国尼布拉斯卡肯大学也对曲线孔电火花加工技术进行了一些探索性的研究工作,但尚未开发出一种高效实用的曲线孔加工技术.
2.4 特种作业
用于特种作业的仿蚯蚓蠕动机器人,可以辅助完成如水下攻泥、陆上非开挖钻探等人类无法完成的作业,因此近年来逐渐为国内外诸多学者所关注.
如表3所示,中科院沈阳自动化研究所提出一种“水下自动攻泥机”[9];哈尔滨工程大学将地下穿孔机的冲击原理与蚯蚓的蠕动机理相结合,提出一种头部冲击式拱泥机器人,并在此基础上研发出该机器人的原理样机[10];武汉理工大学研制出一种水下仿生拱泥机器人[11];西北工业大学进行了仿蚯蚓在土质环境下拱洞机器人的研究工作[12].
综上所述,当前的仿蚯蚓拱泥机器人主要采用液压缸驱动或气动的方式来提供动力,尾部需拖拽组合缆线,会增加作业过程中的能源消耗.另一方面,机器人在工作过程中一旦发生故障,很难进行回收.

?
3 仿蚯蚓蠕动机器人的发展趋势
随着机器人技术的不断进步,未来仿蚯蚓蠕动机器人在医疗、微型管道检测、曲线孔加工、特种作业等领域将会得到更广阔的应用和更好的发展,主要分析如下:
(1)医疗方面:压电驱动的人工肌肉是当下各国学者的研究热点,由于其伸缩特性与蚯蚓肌肉的胀缩特性相似,且不存在气流驱动方式带来的缺点,因此对于内窥镜机器人驱动器的研究具有一定的借鉴意义.此外,随着纳米技术等的发展,利用水生微生物的运动原理,研究能进入上述人体管道的超微内窥镜机器人也是将来的重要研究方向.
(2)微型管道检测方面:随着微机电系统(MEMS)技术的发展,采用微型电机作为执行器,外部电磁场作为动力源的驱动方式将可能替代SMA驱动器.因为它能承受较大负载,提供较大的驱动力,且无需拖线,可以减少机器人运动过程中的阻力,提高运动效率.
(3)曲线孔加工方面:通过研究机器人本身与加工环境之间的相互作用、加工机理,有助于解决加工过程中排屑、工作液循环等问题,能提高加工的稳定性、精确性和效率性,所以可能是将来研究的一个突破点.此外,研究如何加工孔径、曲率半径更小的复杂空间曲线孔,也是未来发展的重要方向.
(4)特种作业方面:研制新型高效的能源供给和驱动方式,借鉴探地雷达工作原理实现通讯的无线化和作业的无缆线化,是未来发展的一个重要方向;另一个重要方向是实现机器人在各种复杂、恶劣环境中的自动定位和自主识别,使其能据此开展各种活动,并能在发生故障时启动备用系统,实现自救.
除此之外,未来的仿蚯蚓蠕动机器人还将具有多功能化的特点,可以广泛应用于地震、爆炸、火灾等现场的搜救活动,未知环境的探险,军事侦察,考古探测,地质勘探等领域.
4 结论
基于蚯蚓蠕动机理的仿生机器人,近年来在生物医学、工业加工与检测、水下探险等领域得到了飞速的发展,并且在其他领域也有非常广泛的应用前景,因此获得了世界各国的高度重视.但由于技术条件的限制,其在尺寸的微型化、驱动方式的完善化、加工和检测的高效化、通讯的无线化、操作的智能化等方面仍然存在许多缺陷和困难.随着MEMS(Micro-Electro-Mechanical Systems)技术、纳米技术、通讯技术、人工智能技术等的不断发展,相信未来的仿蚯蚓蠕动机器人将经历更高的发展阶段.
[1]张扬.微型仿生蠕动机器人的研究[D].上海:上海交通大学,2009.ZHANG Yang.The research on creeping micro-bionic robot[D].Shanghai:Shanghai Jiaotong University,2009.
[2]GLOZMAN D,HASSIDOV N,SENESH M,et al.A self-propelled inflatable earthworm-like endoscope actuated by single supply line[J].IEEE Transactions on Biomedical Engineering,2010,57(6):1264 -1272.
[3]迟冬祥,颜国正,林良明.基于蚯蚓运动原理的肠道检查微小机器人内窥镜系统[J].机器人,2002,24(3):222-227.CHI Dongxiang,YAN Guozheng,LIN Liangming.A novel miniature robotic endoscope design for intestinal inspection based on earthworm[J].Robot,2002,24(3):222 - 227.
[4]王坤东,颜国正.仿蚯蚓蠕动微机器人牵引与运动控制[J].机器人,2006,28(1):19-24.WANG Kundong,YAN Guozheng.Locomotion and its control of earthworm-like microrobot[J].Robot,2006,28(1):19 -24.
[5]史伟.基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究[D].哈尔滨:哈尔滨工程大学,2008.SHI Wei.Research on peristaltic micro in-pipe robot based on SMA actuator[D].Harbin:Harbin Engineering University,2008.
[6]KIM B,LEE M G,LEE Y P,et al.An earthworm-like micro robot using shape memory alloy actuator[J].Sensors and Actuators,2006,125:429-437.
[7]马建旭,李明东,包志军,等.仿蚯蚓蠕动微机器人及控制系统[J].上海交通大学学报,1999,33(7):855-857.MA Jianxu,LI Mingdong,BAO Zhijun,et al.Micro peristaltic robot simulating earthworm and its control system[J].Journal of Shanghai Jiaotong University,1999,33(7):855 -857.
[8]贾宝贤,刘永红,杨毅.仿蚯蚓机器人蠕动装置的研究[J].机器人,2000,22(5):415-418.JIA Baoxian,LIU Yonghong,YANG Yi.A study of a crawling device in imitated earthworm robot[J].Robot,2000,22(5):415 -418.
[9]王建华,冯士伦,林杨.蠕动爬行攻泥机构工作特性的有限元分析[J].机器人,2002,24(1):76-80.WANG Jianhua,FEN Shilun,LIN Yang.The finite element analysis of working behavior of the move-in-soil manipulator[J].Robot,2002,24(1):76-80.
[10]魏洪兴,孟庆鑫,王田苗.拱泥机器人原理样机的研制[J].中国造船,2003,44(1):89-93.WEI Hongxing,MENG Qingxin,WANG Tianmiao.Elementary prototype of move-in-mud robot[J].Shipbuilding of China,2003,44(1):89 -93.
[11]张英,孙虎,胡勇.水下仿生拱泥机器人方案研究[J].武汉理工大学学报,2005,27(4):43-46.ZHANG Ying,SUN Hu,HU Yong.A prototype of the underwater move-in-mud robot[J].Journal of Wuhan Automotive Polytechnic University,2005,27(4):43 -46.
[12]李燕.仿蚯蚓在土质环境下拱洞机器人的研究[D].西安:西北工业大学,2004.LI Yan.Research on earthworm-like robot which cove hole under the earth[D].Xi’an:Northwestern Polytechnic University,2004.
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19 13:52:04
现代仪器与医疗(2021年6期)2022-01-18 03:22:50
现代仪器与医疗(2021年4期)2021-11-05 08:25:30
建材发展导向(2021年14期)2021-08-23 00:57:14
中国煤层气(2019年2期)2019-08-27 00:59:30
作文小学中年级(2018年5期)2018-06-11 01:16:12
小学生导刊(2017年19期)2017-07-19 13:41:50
快乐语文(2017年9期)2017-06-15 20:28:36
环境与可持续发展(2017年2期)2017-04-06 03:07:30
中国卫生标准管理(2015年3期)2015-01-27 00:57:55