
微型涵道飞行器飞行力学模型研究
2012-03-03 06:15蔡红明昂海松邓双厚张华靓
飞行力学 2012年3期
蔡红明,昂海松,邓双厚,张华靓
(南京航空航天大学航空宇航学院,江苏南京 210016)
引言
涵道飞行器具有安全性高、结构紧凑、噪声低的优点。在同样的功率消耗下,涵道飞行器较同样直径的孤立风扇会产生更大的拉力。近年来,在广阔的应用前景刺激下,涵道飞行器已经成为一个国际性 的 研 究 热 点,如 美 国 的 Cypher[1],ISTAR[2],GTSpy[3]等,其中有的已经试飞成功并装备部队,国内的相关研究也开始起步[4]。
微型涵道飞行器的大包线飞行使得其空气动力学非线性特性十分显著。本文利用低雷诺数风洞实验分析了微型涵道飞行器的气动特性,并采用CFD数值模拟方法计算了微型涵道飞行器的动阻尼导数,进而建立了微型涵道飞行器的空气动力学模型以及六自由度飞行力学模型,最后计算了它的基本飞行性能和配平曲线。
1 低雷诺数风洞实验
1.1 实验模型介绍
图1为南京航空航天大学研制的微型涵道飞行器,它能够完成悬停、倾转和前飞的大包线飞行。但是由于小尺寸和低速度特性,其具有显著的低雷诺数效应,机翼失速迎角较低。涵道由于受风扇吸流的影响,失速迎角较高,涵道升力在悬停及倾转过程中占升力比重较大[5],风扇在悬停和低速前飞时提供升力,对转风扇相互抵消扭矩。
以微型涵道飞行器为研究对象,通过低雷诺数风洞实验,研究它在不同状态参数下的空气动力学特性,在整个实验过程中,都采用全尺寸模型。该微型涵道飞行器的主要参数如下:涵道直径0.13 m;涵道弦长0.25 m;机翼展长0.5 m;机翼弦长0.09 m;飞行器质量0.5 kg;巡航速度14 m/s。该MAV的涵道外壁上布置了两个对称机翼,在以飞机模式快速前飞时能提供足够的升力,保证良好的前飞性能。涵道出口安装有方向舵和一对差动舵面,由于各舵面作用在风扇尾流中,因而它们都有较高的气动效率。涵道飞行器的纵向运动由差动舵面同步运动来控制,涵道飞行器的横航向运动则由方向舵和差动舵面差动运动来控制。

图1 自研的微型涵道飞行器
1.2 风洞介绍
微型涵道飞行器具有尺寸小、低飞行速度的特征,它的雷诺数在50 000左右。风洞实验采用开口回流式低速风洞,涵道飞行器在开口段吹风,该开口段的主要技术数据见表1。微型涵道飞行器在风洞中的安装情况如图2所示。

表1 低雷诺数实验风洞数据表
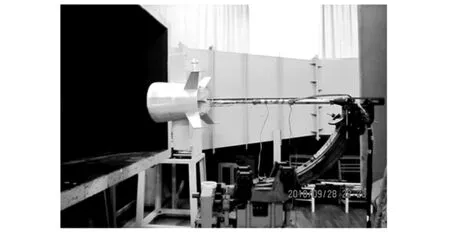
图2 在风洞中安装情况
1.3 风洞实验结果分析
本文采用最小二乘法对微型涵道飞行器低雷诺数风洞实验数据进行处理。图3给出了风速4 m/s情况下不同状态的气动力和气动力矩随迎角的变化曲线(图3(a)的风扇转速为12 500 r/min和15 000 r/min,升力、阻力指飞行器从飞机模式水平飞行至直升机模式悬停状态的结果;图3(b)的风扇转速为12 500 r/min)。
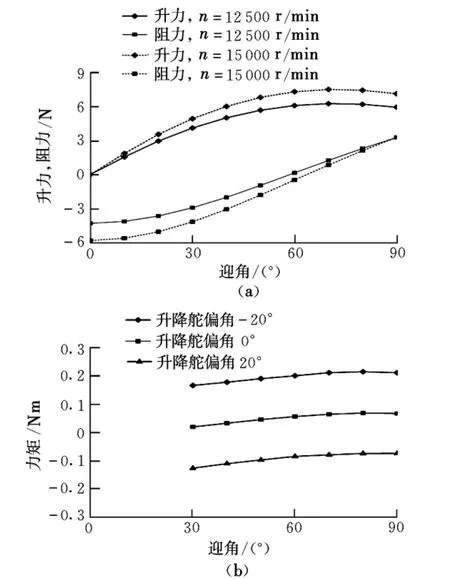
图3 气动力和气动力矩随迎角变化曲线
由图3(a)可以发现,涵道产生的升力分量的最大升力不是产生在悬停状态,而是在70°迎角附近。升力曲线在最大升力点后未出现突然跳跃,说明该涵道飞行器具有良好的失速特性。由图3(b)可以发现,升降舵有足够的操纵权限来配平和改变飞行器的飞行状态。
2 动阻尼导数计算
动阻尼导数对微型涵道飞行器飞行动力学特性具有非常重要的影响。动导数获取手段有数值模拟[6-7]、风洞实验[8-9]和理论计算[10]。由于经费限制,未进行动导数风洞实验。理论计算效率较高,但精度较差。本文在非结构网格技术基础上,采用二阶精度的中心有限体积法和全隐式双时间推进方法进行非定常欧拉方程求解。
本文研究的微型涵道飞行器的流场有较大的运动幅度,采用嵌套网格技术把流场适当地划分为两个具有重叠部分的区域,各个区域分别生成独立的网格并在其上求解,在重叠区上通过网格间插值进行区域间信息交换。图4为微型涵道飞行器嵌套后的网格。
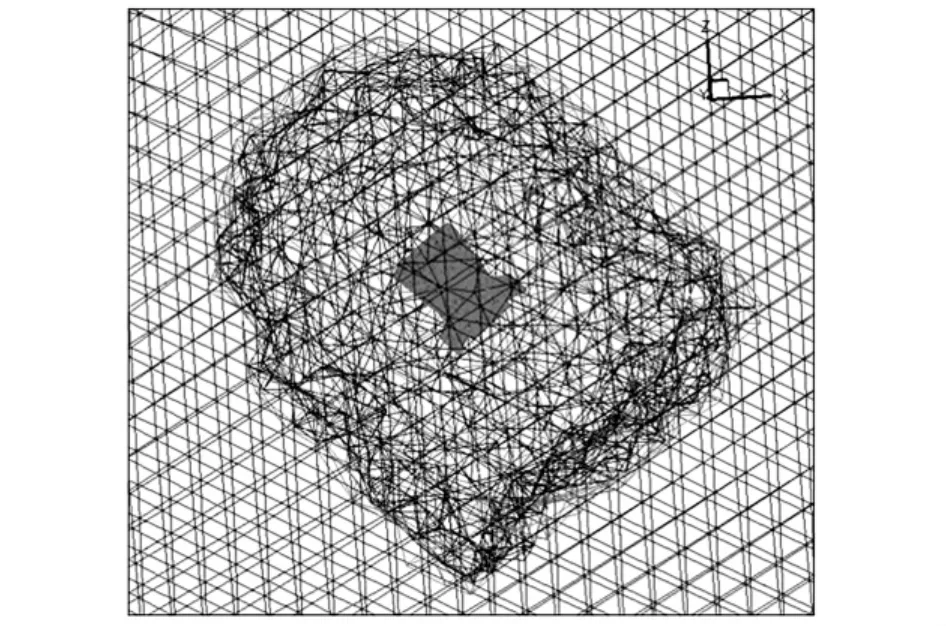
图4 微型涵道飞行器嵌套后的网格
采用强迫运动的方法求出微型涵道飞行器的俯仰稳定性参数。具体做法是采用强迫振动法提供动态气动力系数的时间历程曲线和迟滞曲线。图5为Ma=0.03时涵道飞行器俯仰力矩系数随迎角变化的迟滞曲线。由于局部时间步长、隐式残差光顺等加速收敛方法的使用,气动力从第三个周期已经收敛,得到周期解。再通过积分就可以求得动阻尼导数,具体过程见文献[6]。

图5 俯仰力矩系数随迎角变化的迟滞曲线
3 飞行力学模型研究
3.1 欧拉方程
微型涵道飞行器的飞行力学模型由运动学方程、动力学方程、大气模型和空气动力学模型组成。在构建微型涵道飞行器的运动学方程模型时,分别采用航迹坐标系下的质心运动方程和机体坐标系下的旋转运动方程:
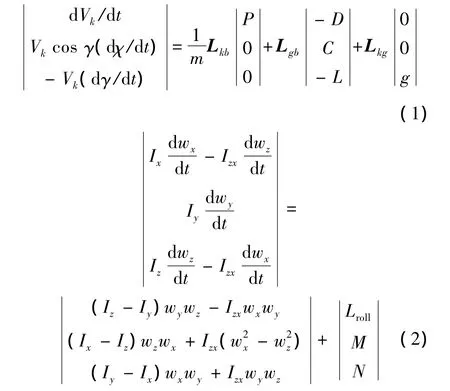
式中,Vk为飞行速度;γ,χ分别为航迹倾斜角和航迹方位角;P为风扇拉力;D,C,L与 Lroll,M,N 分别为气动力与气动力矩。
3.2 飞行力学仿真模型
由前面建立的飞行力学模型,应用商业计算软件Matlab/Simulink建立微型涵道飞行器的飞行力学仿真模型如图6所示。
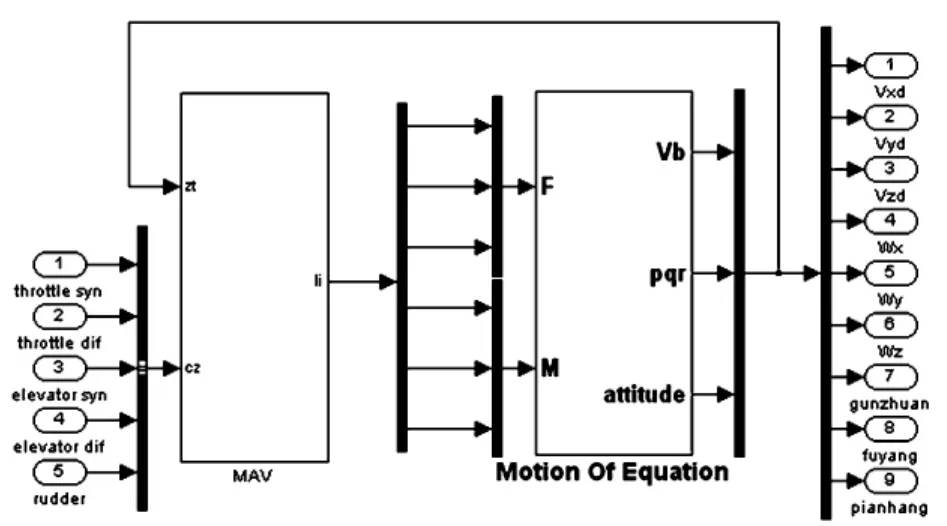
图6 飞行力学仿真模型
3.3 基本飞行性能
3.3.1 悬停时的飞行性能
把低雷诺数风洞实验无风状态时实测的数据进行最小二乘法拟合,计算出悬停时对转风扇的转速为12 400 r/min。
3.3.2 直升机模式的飞行性能
把低雷诺数风洞实验有风状态时实测的数据进行最小二乘法拟合,计算出直升机模式的最大飞行速度为2 m/s。
3.3.3 飞机模式的飞行性能
把低雷诺数风洞实验有风状态时实测的数据进行最小二乘法拟合,计算出飞机模式的最小飞行速度为10 m/s。
3.4 配平计算结果分析
把微型涵道飞行器的基本参数输入到前面建立的飞行力学仿真模型中,用Matlab/Simulink仿真环境对微型涵道飞行器进行计算。
图7为微型涵道飞行器从悬停状态到直升机模式小速度前飞,再到飞机模式大速度前飞的配平结果。该微型涵道飞行器直升机模式的最大速度明显小于飞机模式的最小速度,满足安全模式转化要求。悬停时,风扇和涵道产生升力,微型涵道飞行器的风扇转速较大,升降舵偏角为0°。随着前飞速度的增大,微型涵道飞行器向前倾转,风扇转速减小,升降舵偏角增大。随着前飞速度的进一步增大,微型涵道飞行器进一步向前倾转,风扇转速增大,升级舵偏角减小。
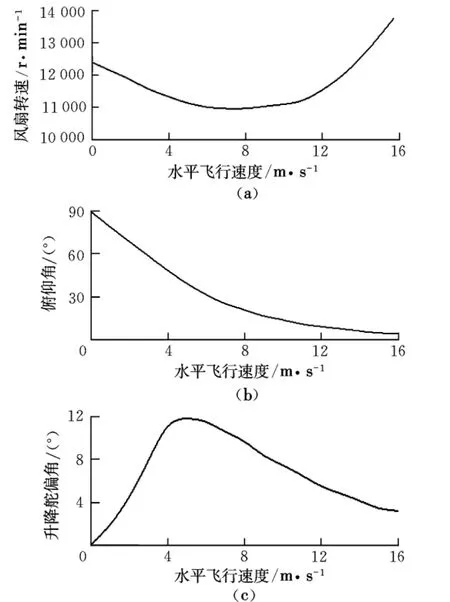
图7 微型涵道飞行器配平结果
4 结论
(1)微型涵道飞行器倾转是在直升机模式有一定的前飞速度下开始的。以直升机模式前飞时,随着前飞速度增加,风扇转速减小,俯仰角减小,升降舵偏角增大。
(2)在倾转过程中,涵道产生较大升力,倾转到迎角70°时,总升力达到最大值。随着前飞速度增加,风扇转速先减小后增大,俯仰角继续减小,升降舵偏角先增大后减小。
(3)微型涵道飞行器转入飞机模式前飞时,机翼产生大部分升力,风扇和涵道产生拉力。随着前飞速度增大,风扇转速增大,俯仰角继续减小,升降舵偏角减小。
(4)该微型涵道飞行器可以完成悬停、倾转和前飞的大包线飞行。
[1] Murphy D W,Bott J P,Bryan W D,et al.MSSMP:no place to hide[C]//Proceedings AUVSI.Baltimore,MD,1997:281-290.
[2] Ko A,Ohanian O J,Gelhausen P.Ducted fan UAVmodeling and simulation in preliminary design[C]//AIAA Modeling and Simulation Technologies Conferences and Exhibit.Hilton Head,South Carolina,2007:1-19.
[3] Eric N J,Michael A T.Modeling,control,and flight testing of a small ducted-fan aircraft[J].Journal of Guidance,Control,and Dynamics,2006,29(4):769-779.
[4] 李建波,高正,唐正飞,等.涵道风扇升力系统的升阻特性试验研究[J].南京航空航天大学学报,2004,36(2):164-168.
[5] Will E G.Effects of duct lip shaping and various control devices on the hover and forward flight performance of ducted fan UAVs[D].Virginia:Virginia Polytechnic Institute and State University,2005.
[6] 范晶晶,阎超,李跃军.飞行器大迎角下俯仰静-动导数的数值计算[J].航空学报,2009,30(10):1846-1850.
[7] Scott M M.Reduced-frequency approach for calculating dynamic derivatives [J].AIAA Journal,2007,45(6):1161-1168.
[8] Frank G M,Roy C S Jr.Dynamic derivatives for missile configurations to Mach number three[J].Journal Spacecraft,1978,15(2):65-66.
[9] Huang Da,Gen Xing-wu.Unsteady rolling moment characteristics for fighter oscillatingwith yawing—rolling coupled motion [J].Journal of Aircraft,2006,43(5):1570-1574.
[10] Zhao Hui-when,Cees B.Aerodynamic design and analysis of a VTOL ducted-fan UAV[C]//26th AIAA Applied Aerodynamics Conference.Honolulu,Hawaii,2008:18-21.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
小哥白尼(野生动物)(2020年3期)2020-07-27
数学大王·中高年级(2018年11期)2018-12-17
测控技术(2018年10期)2018-11-25
北京航空航天大学学报(2017年2期)2017-11-24
西北工业大学学报(2015年4期)2016-01-19
西北工业大学学报(2015年4期)2016-01-19
民用飞机设计与研究(2015年3期)2015-12-07
科技传播(2014年4期)2014-12-02
实验流体力学(2011年5期)2011-01-14
