
基于ARM的N+1自动切换控制系统的设计
2012-02-16 05:37党宏社张新院
陕西科技大学学报 2012年6期
党宏社, 姚 勇, 张新院
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
0 引言
为了避免发射机故障造成停播事故,大多数发射台播出系统都采用主机+备机的工作方式.传统的发射机备份采用一台主用发射机配一台备机的方式,随着需要播出节目的增多,该方式每套节目需两部发射机,无疑将增加设备的投资.同时这种备份方式的备机利用率低,且设备维护量大[1,2].
随着发射机技术的发展,全国发射台的多数调频节目已基本上都采用全固态调频发射机,全固态调频发射机可以发射全频带任意一个频点的节目,这使得设计N+1播出系统成为可能,即多台发射机共用一台备机[1,3].这种方式不但能达到主用发射机故障不停播的目的,而且减少了备机设备的投资和维护量.但目前全国的发射台投入全自动N+1播出系统的不多,并且N+1自动切换控制系统实现方式也不尽相同,新光N+1发射控制系统[2],以工控机为控制器,信息获取需依赖发射机自带的微机控制;吉兆调频N+1自动切换控制系统[3],以PLC为控制器,为每部发射机配备了专用的测控模块.上述控制系统可靠性高,但系统成本也很高.为了克服这些控制系统中存在的系统成本高,和对发射机自带的微机控制有依赖的缺点,提出了利用多颗嵌入式微控制器实现备机切换的信息采集与控制,以达到在主用发射机故障时,能够快速安全地让备机代播,保证节目的优质播出.
1 控制系统的总体设计方案
1.1 控制要求
控制要求包括[1,3]:(1)监测主备机的运行状态;(2)根据预先设定的倒备机条件,判断出故障机并实施倒备机过程;(3)响应远程上位机的命令,实现对N+1播出系统的远程监控;(4)要有联锁保护功能,保证设备安全;(5)倒备机要尽可能的快.
1.2 倒备机原理
N+1播出系统中的N表示播出的节目数,1表示备用发射机.以N=4,播出4个调频节目为例,图1是一个4+1播出系统的连接示意图[1,2].
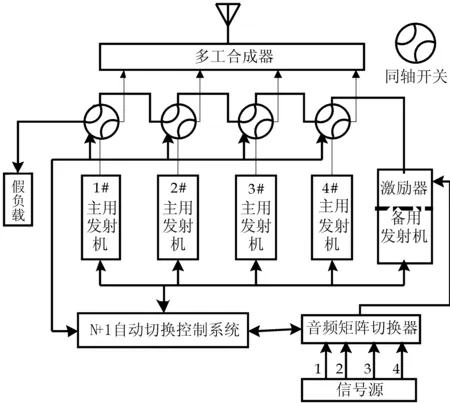
图1 4+1播出系统连接示意图
如图1所示,当主用发射机正常时,主用发射机的输出至天线,备机通过同轴开关连接至假负载.当任意1台主用发射机故障时,4+1自动切换控制系统通过控制配备的同轴开关,来倒换主备机输出端的连接关系,使备机输出至天线,故障机输出至假负载;通过向音频矩阵切换器下发切换指令,将代播节目切换至备机音频输入端;通过向备机的激励器下发载波频率切换指令,将备机的输出频率设定为故障机的播出频率.
1.3 控制系统总体方案
本系统采用了一种基于多颗嵌入式微控制器的控制方案,该方案将控制系统功能划分到不同的子控制单元中[4],功能分配表如表1所示.利用重新配备的智能I/O测控模块,使系统对发射机自带的微机控制没有依赖,以提高系统的可靠性;利用高速数字CAN通信,减少交换信息的时间,从而减少倒备机时间;利用开发灵活、低成本的嵌入式技术,来降低控制系统成本[5].

表1 各控制单元功能分配表
以4+1自动切换控制系统为例,该系统的总体框图如图2所示,由主控单元、4+1个智能I/O测控模块和触摸屏模块组成,主控单元与智能I/O测控模块通过CAN总线交换信息.主控单元与触摸屏通过触摸屏接口交换信息.

图2 4+1自动切换控制系统总体框图
2 控制系统的设计与实现
系统中的触摸屏模块选用迪文工业串口屏DMG80480S70-01WT,该屏提供的开发指令丰富,能够满足系统人机交互需要.
系统的核心组件是主控单元和智能I/O测控模块.各控制单元都要有CAN通信功能、数据存储功能,并且要求较高的数据处理速度,同时为了缩短开发周期,各控制单元选用了型号相同的微控制器.
经过调研比较,嵌入式微控制器芯片选择为STM32F103VC,该芯片为32位ARM核微控制器,含有丰富的片内外设,包含设计中所需的CAN控制器、SPI接口、I2C接口、3路串口、12位AD转换(3个模数转换器,多达21个通道);内含256KFLASH和64KSRAM,满足程序设计需要.
2.1 主控单元的设计
2.1.1 硬件设计
主控单元完成的是对监控信息的管理,根据表1,设计了基于STM32F103VC的主控单元,硬件框图如图3所示,主控单元包括CAN通信接口、以太网接口、1路RS-232/485(跳线可选)的通信接口、触摸屏接口以及存储模块.
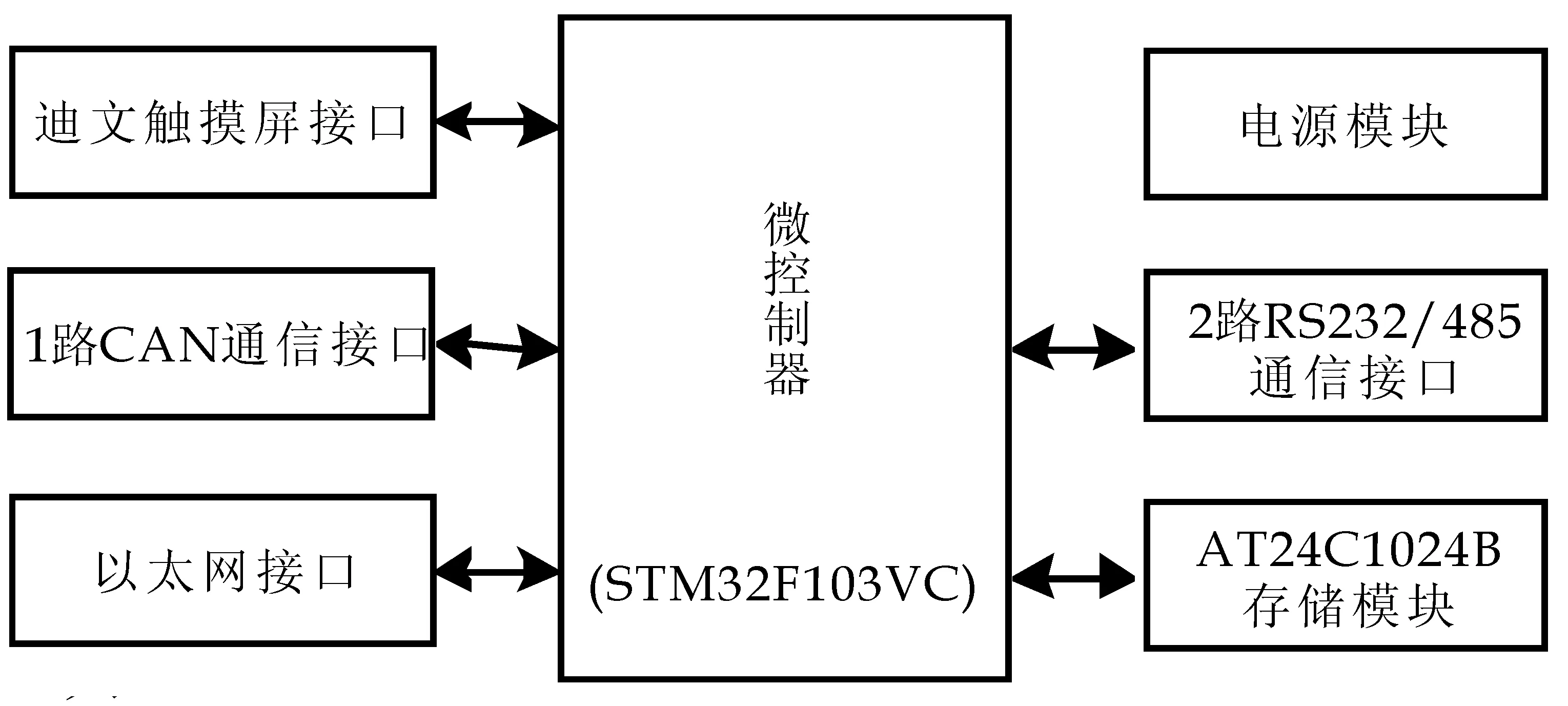
图3 主控单元的硬件框图
CAN通信接口是由微控制器内置的CAN控制器、通信隔离芯片ADUM1412、CAN收发器TJA1050和DB9插座依次连接组成;以太网通信接口是由SPI接口的以太网控制芯片ENC28J60、内嵌以太网变压器的RJ45插座HR91105A依次连接组成;RS-485/232通信接口是由微控制器内置的串行接口、通信隔离芯片ADUM1412、MAX485/232通信收发器和DB9插座依次连接组成;存储芯片选择为2片I2C接口AT24C1024B,总容量为256 K字节;触摸屏接口与迪文触摸屏模块相连.
2.1.2 软件设计
软件设计采用模块化的设计方法,主控单元软件包含的模块有:CAN通信模块,获取所需的倒备机信息,下发开关机指令,下发同轴开关切换指令;倒备机控制模块,判断哪路节目需要代播,并控制倒备机过程的实施;触摸交互模块,完成系统参数的设置和N+1系统状态的实时显示;存储模块完成切换条件等系统参数的存储;与上位机通信的网络/串口通信模块,实现对N+1播出系统的远程监控.
在此主要介绍倒备机控制模块,其它软件模块都是较常见的模块,可参考相关文献实现.倒备机控制模块的流程图如图4所示,主控单元根据获取的信息,判断并启动倒备机过程,按照切换时序,通过控制与各组件的通信过程,发送相应的切换命令来控制整个倒备机过程.与其配合的控制组件在完成指定命令后,会回送相应执行结果信息,主控单元再根据回送信息,来决定下一步切换动作.
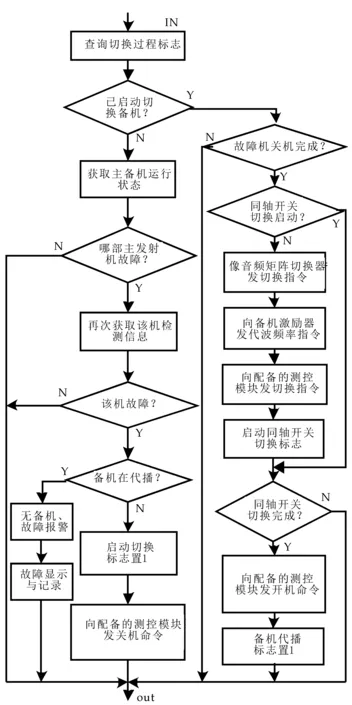
图4 倒备机控制流程图
2.2 智能I/O测控模块的设计
智能I/O测控模块是根据发射机的取样接口、判断倒备机信息以及使用的同轴开关设计的,它以STM32F103VC为微控制器,设计了8路AI、7路DI、8路DO与发射机取样接口相连(有余量),实现对倒备机信息的采集与发射机的自动开关机;设计了6路DI、3路DO与同轴开关的取样接口相连,实现对同轴开关的控制.
2.2.1 硬件设计
(1)模拟量输入通道
发射机取样接口的模拟量电平是0~5 V,微控制器的AD转换器只能转换0~3.6 V,需要调理电路将5 V降至3.6 V.被测模拟量经过∏型低通滤波(截止频率48 Hz),防止工频干扰;再经过LM324组成的两级反向放大电路将(0~5 V)降至(0~3.6 V),输入至微控制器的AD转换器.
(2)数字量输入通道
被测数字量经过TLP521光电隔离后,再通过带施密特触发器的反相器74HC14将波形整形,连接至微控制器的I/O端口.
(3)数字量输出通道
为了增加微控制器端口驱动负载的个数,在微控制器的I/O端口与负载驱动电路之间增加了IC缓冲器.微控制器输出的数字量经过74HC14后,通过TLP521光电隔离,再通过三极管(9013)驱动继电器(DS2Y-S-3DC)输出至控制接口.
(4)手动控制与状态显示
手动控制设置了一个手/自动控制选择开关和两个手动操作按钮,控制同轴开关正/反转;状态显示用来反映同轴开关的连接状态,同轴开关中的位置开关的闭合/断开,来控制4个绿色LED的亮灭.
2.2.2 软件设计
智能I/O测控模块的软件包括CAN通信模块、同轴开关联锁切换模块、数据采集模块、系统参数存储模块和自动开关机模块.CAN通信模块和存储模块与主控单元类似,数据采集模块和自动开关机模块与发射机机型相关,实现起来相对容易,在此,主要介绍同轴开关联锁切换模块.
同轴开关联锁切换模块的软件流程图如图5所示,该切换控制具有手/自动两种工作方式.在手动方式下,通过继电器控制电路实现手动控制,这样使得同轴开关联锁切换模块的手、自动方式互不影响,增加系统的可靠性;在自动模式下,通过CAN通信接口,接收主控单元发出的倒备机/恢复主机命令.判断备机代播和故障机关机的联锁信息,当连锁正常时,驱动同轴开关的电机转动,以保证在故障机功率已降且无备机连接天线的条件下,完成倒备机过程,从而保护同轴开关和主用发射机;当备机成功连接天线时,输出允许备机开机连锁信息,以保证备机成功连接天线,才能升备机功率,从而避免损坏备用发射机.
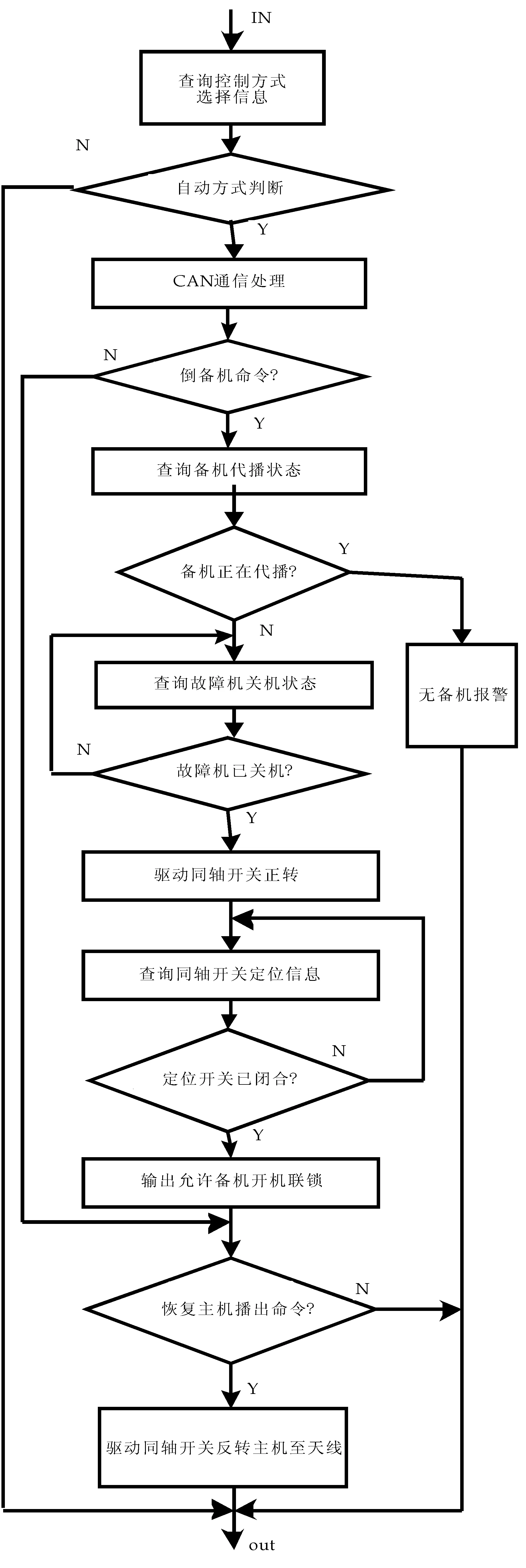
图5 同轴开关联锁切换流程图
3 结束语
设计了一种基于嵌入式微控制器的N+1自动切换控制系统,利用嵌入式微控制器,降低了系统的成本;利用智能I/O测控模块,使系统对发射机自带的微机控制没有依赖,提高了系统的可靠性;利用高速CAN通信总线作为信息交换的途径,减少了获取监测信息的时间;采用多控制器系统结构,使系统各组件模块化,能够很好地适应不同机型的发射机.该N+1自动切换控制系统具有成本低、可靠性高、适应性好等特点,具有推广应用价值.
[1] 蒋红安.调频广播发射机N+1播出系统简介[J].广播电视信息, 2007,14(8):48-50.
[2] 成都新光微波工程有限责任公司.新光N+1电视发射机系统说明书[EB/OL]. http://www.catvmmds.com/DownClass-3-1.html, 2010-01-22.
[3] 杨 凯.调频发射机N+1自动切换控制系统设计[J].电视技术, 2006,29(12):77-78.
[4] 寇 强,党宏社.3 kW调频广播发射机微机控制器的硬件设计[J].计算机测量与控制,2008,16(7):964-966.
[5] Tammy Noergaard著.马洪兵译.嵌入式系统硬件与软件架构[M].北京:人民邮电出版社,2009.
猜你喜欢
能源工程(2021年5期)2021-11-20
装备制造技术(2019年12期)2019-12-25
知识就是力量(2018年7期)2018-07-11
电子制作(2017年14期)2017-12-18
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
海军航空大学学报(2015年4期)2015-02-27
单片机与嵌入式系统应用(2014年8期)2014-03-23
单片机与嵌入式系统应用(2014年9期)2014-03-11
河南科技(2014年12期)2014-02-27
