基于Geoway CIPS进行带POS数据的大比例尺正射影像快速生产初探
2012-02-08 09:31王商富
城市勘测 2012年3期
王商富
(福州市勘测院,福建福州 350003)
1 研究背景
根据《福州市城市总体规划(2010—2020)》方案,福州市委、市政府将全力打造福州大都市区。福州大都市区范围内的所有市县要整体考虑、统筹规划,尤其是与福州中心城区发展密切相关的福清、长乐、闽侯、连江等周边县市的总体规划、控制性规划,由福州市统一组织编制、统一组织审批、统一组织实施。福州市勘测院作为承担福州大都市区 7 630 km2面积的 1∶2 000正射影像生产任务的城市勘测单位,利用带POS/AV系统数据的数码航拍技术结合Geoway CIPS平台进行快速正射影像生产进行了小规模的前期生产试验,通过对生产过程关键节点方案的研究设计和后期精度评估,摸索出一套快速制作大比例尺正射影像的较为完善生产体系。
Geoway CIPS(Clustered Image Processing System)集群式影像处理系统是一个构建在网格计算环境下的,适合大规模遥感影像快速、批量处理的一整套软硬件产品技术解决方案,它以“高性能集群计算”为特征的遥感影像快速处理,其特征为自动、高效、智能,具体体现在近乎自动化的空三以及DEM/DOM的快速生产[1]。本文主要结合Geoway CIPS和INPHO OrthoVista软件进行 1∶2 000正射影像数据像控布设设计、生产粗DEM高效滤波算法(内插、形态学等)、利用拓扑规划技术的影像接边线自动查找生成、INPHO OrthoVista软件的影像智能匀光技术等关键的生产工序。
2 工程任务简介
本次航摄区域覆盖整个福州大都市区域,面积7 630 km2,采用的微软公司生产的带POS/AV系统的高精度数码航摄仪UCX,前期数据采集时间为2011年11月。该区域的航摄基准面相差较大,为保证航摄设计的地面分辨率优于 0.15 m,共分为5个测区,如图1所示,约 15 000幅像片,拟作 0.15 m分辨率的1∶2 000正射影像。

图1 目标区域数码航摄示意图
2.1 Geoway CIPS正射影像制作流程
本次工程区域数据进行大范围生产 1∶2 000正射影像数据尚属于首次,对于制定一个有效、快速、并且能够满足测绘相关规范要求的生产方案至关重要。实验区位置在3区中的城郊区部分,涉及12条航线、720幅、约 400 G的UCX数据;本次工程试验实施硬件方面受条件限制采用单机环境下进行(64位操作系统的图形工作站,Intel®CoreTM2 Quad CPU Q8200@2.33 GHz 2.34 GHz,内存 4 GB)。软件环境部署有Geoway CIPS系统和 INPHO OrthoVista软件,Geoway CIPS系统部署的包含功能有空三加密模块、自动DSM匹配模块、自动DSM滤波模块、自动粗格网DEM生产模块、匀光匀色模板制作模块、自动DOM制作模块、镶嵌线编辑以及影像修复模块。试验是基于原始航飞UCX数据、初始POS数据以及外业布控完成从空三加密、粗格网DEM生产以及后期正射影像图制作的完整生产流程,如图2所示。

图2 UCX数据进行1∶2 000正射影像生产方案
3 Geoway CIPS在大比例尺快速成图中的若干问题思考
Geoway CIPS软件系统具有方案定制、流程化、高效自动化以及优异的作业监控能力,极适合大范围大批量大比例尺正射影像生产。而在生产大比例尺正射影像数据过程中,航摄过程中POS/AV系统数据质量情况、外业像控点布设方案、空三过程中的“自动化”程度、生产粗DEM成果数据的滤波的有效性、影像镶嵌中接边线的快速合理生成方法、影像匀光匀色效果、后期正射影像修补编辑的便捷化等问题直接影响着正射影像数据生产质量和效率。通过为期一个月的摸索及实践,总结了在试验区生产过程中存在的一些问题及如下思考。
3.1 像控点布设改进方案
由于测区面积大,外业像控点布设太多直接降低生产效率、若布设太少又影响成图精度。本次工程尽管采用POS/AV系统数据,由于多种误差源(IMU轴线偏差、GPS/IMU偏心分量、GPS和IMU系统偏移)的影响,GPS/IMU系统提供的位置、姿态参数存在着系统性误差,难以直接达到像素级的定位精度[4]。针对大比例尺地形图测绘的应用需求,利用少量地面控制点进行GPS/IMU数据与像点坐标观测值的联合平差,消除GPS/IMU数据的系统误差。下面进行外业像控点评估:

其中,b为平均像片基线长,mq为按像片比例尺计算的加密点上下视差量测中误差,n为像控点间的基线数。

图3 控制点精度评估图(左图:平面精度;右图:高程精度)
外业像控布设原则:测区四周控制点分布多一些,测区中间均匀分布,包括平面控制点和高程控制点。控制点个数受很多的因素影响,没有标准,本次航摄有带POS/AV系统数据。通过上述分析,本次试验区再适当地减少控制点个数,采用基线数为30布设1个控制点,航线方向为隔6条分别布设,测区内部布设3个检查点,检查点与控制点隔10条基线以上,试验结果符合精度要求。针对试验区外的工程范围像控点布设密度还可以根据情况再进行放宽,表1为试验区空三加密报告。
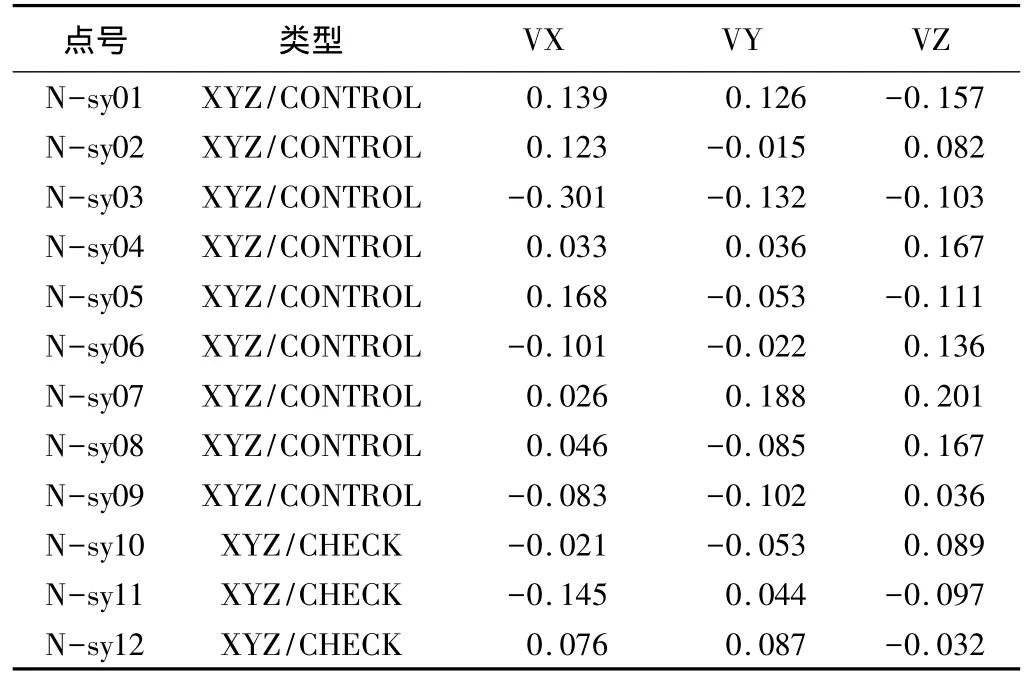
试验区空三加密精度报告 表1
由于本次福州大都市作业范围面积较大、航摄区域不规则,测区分区需要进行统筹规划,尽量做到矩形分区,对于不规则加密测区,边角上需要另外布设像控点。
试验表明带POS/AV系统的数码航摄影像数据在空三加密中还需要加入少量像控点才能保证大比例尺(成图 1∶2 000比例尺以下)正射影像成图精度。对于比较规则区域的加密测区,在比较常规的航向/旁向重叠度情况下,航片数 ∶像控点数≈80∶1,在不规则航线布设地区,这个比值要小些,对于评估福州大都市区 1∶2 000正射影像生产布设像控点工作量有一定的参考意义。
3.2 生产粗DEM成果数据的滤波还有待改进
对于生产1∶2 000正射影像成果来说,基于DSM成果通过滤波生成粗DEM数据的效果好坏直接影响正射影像成图精度和后期影像修补编辑的工作量。对于福州大都市区域来说,地形比较复杂(植被茂密、植被遮挡建筑物现象比较普遍),目前很多滤波算法很难对这些区域的高程点云进行有效过滤。本次试验高效滤波算法结合内插方法从上而下的逻辑、形态学方法自下而上处理方式的优势,提高滤波精度,从匹配精度上来讲,DSM匹配整体效果较好。局部地区如阴影处匹配有些“飞点”,软件提供的滤波功能可以有效滤除粗差点,但还是有部分区域生成的正射影像数据精度偏低、地物扭曲变形,因此建议基于粗DEM纠正的同时加入特征线的约束以及针对不同地形特征提供多种匹配策略,使得纠正后影像质量进一步提升,减少扭曲现象。另外本次试验中通过对生成的粗DEM数据在ArcGIS软件中进行坡度变化量检测,提取坡度变化量超过20°的图斑叠套到纠正好的正射影像数据中进行有目的检查精度和变形情况,通过便捷的DOM修复编辑工具进行实时快速修复更新。修复更新区域包括不同模型重叠部分影像可能出现模糊、重影、房子倒影相互矛盾以及房屋、桥梁、公路变形等问题,达到“所见即所得”,修补工具如图4。

图4 左图为待修复的DOM成果;右图为修复后的DOM成果
3.3 接边线的选取及影像匀光匀色
Geoway CIPS软件系统采用灰度相关、纹理特征等多因子,进行接边线高精度匹配,有效避开建筑物、桥梁、大面积水域等地物。利用拓扑规划技术,既减少对冗余数据的处理,又充分利用中心区域影像,基于原始影像中心点地理坐标以及影像有效范围进行的镶嵌网规划(如泰森多边形规划算法等),辅以半自动化人机交互编辑,形成任务规划模型文件,采用逻辑接边、一次成图技术,极大地减少了中间数据冗余,提高镶嵌效率。但部分拓扑规划技术并不能解决高层建筑物投影差较大,造成遮挡周边低层建筑物或者建筑物被接边线穿越情况,可以通过利用单幅靠近中心区域的正射影像数据进行镶嵌,并且即使航向重叠度较大情况下也不允许有抽片现象,保证正射影像成图数据地物投影差达到最小,尤其在城区部分。
作业工序中匀光匀色有经过两道工序需要处理,第一道是数码航空摄影后先通过Ultramap服务器的数据流(“办公室处理中心OPC”)先对测区内所有单幅影像进行前期的自动匀光匀色;第二道工序是基于接边线已经采集的情况下进行整体匀色成图。尽管DOM制作环节中的匀光匀色、智能镶嵌功能一直是Geoway的传统优势,并且提供了强大的整幅匀色、逐块匀色、Mask匀光以及智能匀色算法,能够解决测区影像色差不一致的问题,但是基于实践经验考虑,大部分的匀色软件在对影像匀光和色彩均衡的同时,对影像本身的原色会有极大破坏和信息丢失情况。因此,基于INPHO OrthoVista软件目前优异的匀光匀色能力以及较少改变原有影像信息特色而保持了影像整体色调均匀清晰。在生产作业工序中,镶嵌线自动生成和编辑采用Geoway CIPS软件系统中的ImageStation模块,而影像整体匀光匀色在INPHO OrthoVista软件中进行,通过程序实现ImageStation接边信息生成一份DXF文件导入到INPHO OrthoVista软件信息库中,这样可以兼具各个软件的优点进行数据高效生产。
4 结语
通过实验区的生产实践,福州大都市 7 630 km2的1∶2000正射影像生产方案逐渐完善,针对带POS/AV系统数据与少量控制点在空三加密中联合平差的有效性以及适合哪几个级别大比例尺正射影像成图要求还需进一步实验研究。本文结合目前比较流行的INPHO VISTA软件到Geoway CIPS软件系统中进行正射影像的快速生产提出了一条有效途径,通过上述若干问题的思考,旨在探寻一条更加高效而有质量的大比例尺正射影像生产路线。
[1]北京吉威时代软件技术有限公司.集群式影像处理系统(GEOWAY CIPS)产品白皮书[R].2011.
[2]张祖勋,柯涛,郭大海等.数字摄影测量网格在汶川大地震中的快速响应[J].中国工程科学,2009,11(6):54~62.
[3]北京超图软件股份有限公司.INPHO系列软件整体介绍[R].2009.
[4]张永军,熊金鑫,熊小东等.POS数据的上下视差误差源检测及误差补偿回归模型[J].测绘学报,2011,10:604~609.
[5] 王之卓.摄影测量原理[M].北京:测绘出版社,1979.
[6]袁修孝,付建红,楼益栋.基于精密单点定位技术的GPS辅助空中三角测量[J].测绘学报,2007,36(3):251~255.
猜你喜欢
海峡姐妹(2020年5期)2020-06-22
福建基础教育研究(2019年8期)2019-05-28
海峡姐妹(2018年11期)2018-12-19
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
海峡姐妹(2018年1期)2018-04-12
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
遥感信息(2015年3期)2015-12-13
电测与仪表(2015年22期)2015-04-09