虹湾地区高分辨率成像轨控方案
2012-02-07 13:35:50郑爱武刘勇周建平
中国空间科学技术 2012年6期
郑爱武 刘勇 周建平
(1 北京航空航天大学,北京100191)(2 航天飞行动力学技术重点实验室,北京100094)(3 北京航天飞行控制中心,北京 100094)
1 引言
为了阿波罗计划的实现,美国先后发射了三种系列的月球探测器——徘徊者号(Ranger)、月球轨道器号(Lunar Orbiter)和月球勘测者号(Surveyor)。徘徊者号探测器的主要目的是为了研究整个月球的外观,测量月球附近的辐射和星际等离子体等,检测月球轨道器,以便为“阿波罗”登月做准备。由于徘徊者号探测器屡屡失败,1965年5月-1968年1月,美国又发射了7颗勘测者号探测器,着陆于赤道区附近,继续探测月球并为“阿波罗”载人登月选择着陆点[1-3]。同一时期,美国启动了月球轨道器计划,月球轨道器对月面99%的区域进行了探测,拍摄了大量高分辨率照片,选出了10个可供“阿波罗”飞船着陆的候选登月点,同时还获得许多月球表面的放射性、矿物含量和月球引力场等有用数据[4-5]。
近期(2005-2015年)中国的月球探测将以不载人月球探测为宗旨,分为“绕、落、回”三个发展阶段[6]。目前第一阶段的目标已经实现,第二阶段将开展月面软着陆器探测与月球车月面巡视勘察,这一阶段的任务包括嫦娥三号和嫦娥四号任务[7-8]。虽然嫦娥一号任务取得了成功,获取了全月的图像数据,不过分辨率并不高,无法为嫦娥三号任务实施软着陆提供技术依据。“嫦娥二号”卫星作为探月工程二期的技术试验星,要以验证二期的工程技术为重点,因此嫦娥二号任务将搭载的CCD 立体相机的分辨率由120m 提高到了7m,目标就是获取分辨率更高的全月面图像数据,并在卫星进入环月100km 圆轨道后选择合适时机变轨成远月点高度100km,近月点高度15km的椭圆轨道(下面简称试验轨道,用100km/15km 来表示),并在近月点处对嫦娥三号任务预选的着落区之一的虹湾地区进行高分辨率成像。由于卫星能源的限制,卫星在该轨道上不能长时间停留,成像条件和测定轨精度要求等限制条件也对该轨道的控制实施方案设计提出了很高的要求。为了实现在虹湾地区高分辨率成像的目标,本文结合中国自身的测控资源和测控条件,基于标称轨道对试验轨道进行了特性分析,根据成像的约束条件和测定轨要求,选取合适的降轨点和升轨点,给出了试验轨道控制的计算方案,并通过卫星的安全性分析,确认了该方案的正确性和可行性。
2 试验轨道控制方案
试验轨道是特指用于虹湾地区高分辨率成像的100km/15km 椭圆轨道。“嫦娥二号”卫星在100km 环月圆极轨道上工作一段时间后,在卫星即将经过虹湾地区上空时,择机从100km/100km的圆轨道降轨到100km/15km 的椭圆轨道。随后在近月点附近对成像区域进行高分辨率成像,结束后择机进行升轨机动,重新回到100km/100km 的工作轨道。
2.1 试验轨道工作内容和成像区域
根据嫦娥二号任务要求,卫星需在试验轨道上完成如下工作内容:降轨机动、卫星姿态调整、CCD 相机试成像、生成并注入成像数据、设定相机成像参数、降落相机拍图试验、虹湾地区正式成像、X 频段测控技术试验、升轨机动,以及立体相机/降落相机图像数据下传等工作。同时地面还需要完成地面测定轨,成像数据生成,轨道控制策略计算等工作。
虹湾地区位于月球的北半球中纬度地区,南北长约100km,东西宽约350km,地形较为平坦,没有大的起伏,西北部为高度较低的朱拉山脉和直列山脉,东南部与雨海相连。成像区域为虹湾的一部分区域,位于北纬42.6°~45.6°(北纬44.1°±1.5°),西经18.2°~34.6°之间的一个盆地。
2.2 成像试验的约束条件
根据卫星系统和地面应用系统的要求,虹湾地区高分辨率成像的约束条件有:
1)成像区域为虹湾地区的一部分(北纬42.6°~45.6°,西经18.2°~34.6°)。
2)成像条件要求当地的太阳高度角大于15°,卫星相对月面高度范围为8~31km。
3)嫦娥二号任务采用USB(Unified S-band System)+VLBI(Very Long Baseline Interferometer)测量数据联合定轨,根据嫦娥一号任务的经验,为了满足降轨后测定轨精度以及轨道预报精度的要求,除机动前要求有1~2个注入弧段外,机动后必须预留至少2圈测定轨弧段。并给升轨准备保留1~2个注入弧段。
4)由于轨道降低后卫星受月球热辐射增多,出于卫星的能源限制,卫星在该轨道上不能长时间运行,允许停留时间不超过3天。
2.3 试验轨道特性分析
卫星降轨后由于高度很低,受月球非球形引力摄动影响大,卫星在成像区域上空的高度和近月点幅角都有较大的漂移,如图1、图2所示。
图1是近月点幅角不同的轨道在北纬44.1°的高度变化曲线。图2是对应的近月点幅角变化曲线。其他轨道根数为:历元为2010 年10 月27 日01:33:49,半长轴a=1 795 700m,偏心率e=0.023 668,倾角i=90.0°,升交点赤经Ω=353.9°,平近点角M=0.0°。可以看出,从降轨到进入成像区域,近月点幅角漂移了约10°。如果近月点不在成像区域,为保证成像区的高度要求,则近月点高度应更低,而成像区外存在高山,这将是很危险的,因此降轨控制必须考虑近月点的漂移,使得降轨后正式成像期间的平均近月点纬度为44.1°,偏差不超过2°。近月点幅角初值不同的轨道在升轨过纬度44.1°时的高度变化趋势相似,高度相对第一圈大约下降4km,需要对控制当圈的目标轨道进行偏置。其他轨道参数对成像区高度也有影响,实施的时候偏置量需要根据实际降轨圈、定轨结果和控制误差计算偏置量。图1、图2中横坐标为降轨后的圈号,降轨所在的圈次为第0圈,每过月球升交点1次,圈号加1。

图1 近月点幅角ω 不同的100km/15km 轨道高度变化曲线纬度44.1°,降轨点近月点高度为15kmFig.1 Change of satellite height at latitude 44.1°(the height of perilune is 15km)

图2 近月点幅角ω 不同的100km/15km 轨道近月点幅角变化曲线Fig.2 Change of argument of perilune(the height of perilune is 15km)
2.4 降轨点和升轨点的选择
根据标称轨道[9]和第2.2节中虹湾成像试验约束条件要求,对成像区域的测控条件进行了仔细地计算和分析,发现如果月球轨道入轨的时间不同,考虑月球的遮挡,成像区域的测控条件会发生平移,呈现周期性的变化。在标称轨道下,选择在青岛站第3圈进站前进行降轨机动,之前的两圈弧段可以用于轨道控制参数的注入,变轨后第1圈可以完成轨控后处理及测定轨,第2圈可以继续进行测定轨。第2圈出站后即可以完成控后精确轨道确定,因此可以满足测定轨精度要求。精确测定轨完成后可以用卫星实际轨道生成各种成像注入数据。如图3所示。升轨控制的约束条件比较简单,选择余地较大,考虑在升轨机动前有1~2个注入弧段,因此升轨点的选择为出虹湾区域(标称轨道下为10月29日1:57,在升轨机动前4个跟踪弧段)后,如图4所示。

图3 降轨点的选择Fig.3 Choice of descending impulse

图4 升轨点的选择Fig.4 Choice of ascending impulse
2.5 试验轨道控制计算方案
由于实际轨道不是理想的圆轨道,目标近月点对面的水平脉冲不能使控后轨道同时满足近月点高度和近月点幅角要求。用标称轨道计算表明,对面的水平脉冲如果满足15km 近月点高度,则近月点幅角将偏离10°左右。因此如果想只用一次控制同时满足近月点高度和近月点幅角要求,必须调整姿态或者控制点。下面介绍实施过程中采用的两种降轨控制方法,可同时满足近月点高度和近月点幅角的要求。
(1)固定时刻的降轨控制
在固定时刻开机,通过调整姿态可以实现对近月点高度和近月点幅角的控制。固定时刻控制时,可以通过如下方程组解得控后轨道参数:

式中 r为卫星到月心的距离;p为控后半通径;e为控后偏心率;θ为控后真近点角;ω为控后轨道近月点幅角;ω0为控前轨道近月点幅角;θ0为控前真近点角;rp为近月距。公式(1)在r≤rp时无解。
用上述方法计算出脉冲控制参数后,还须以此为初值用广义的牛顿迭代法精确计算有限推力方式下的姿态和开机长度,使控后轨道满足近月点高度和近月点幅角要求[10]。采用这种方法,可以根据测控条件选择发动机开机时刻,适当将开机时刻推迟,使得关机点在测控可见弧段内,降低控制的风险。
(2)燃料最优的降轨控制
在控制点施加切向速度增量能最有效地改变半长轴的大小,因此与控前轨道相切并且近月点幅角和高度满足要求的轨道就是燃料最优的控后轨道。其控制点及控后轨道平面内参数由下面的非线性方程组可以求得:

式中 Δω为控前控后近月点幅角差;p0为控前半通径;Hp为近月点高度;e0为控前轨道偏心率。公式(2)可以用牛顿迭代法或者用消元法求解。
另外,燃料最优的降轨控制还可以用优化算法进行求解。设计变量为半通径p,优化目标为最小速度增量,即min(ΔV)。约束条件如下:

这实际是一个单变量优化问题,可以采用二次插值法和黄金分割法等单变量优化算法求解。
升轨控制的目标是将近月点高度(如果升轨前远月点高度低于100km,则控前近月点在控后变为远月点)抬升到100km,这可以在远月点施加一个切向脉冲完成,或者结合后续轨道维持,精确控制近月点高度和近月点幅角。
3 卫星安全性分析
根据标称轨道和测控条件,降轨后卫星将在试验轨道段飞行30多圈,降轨后3~5圈进行试成像试验,过虹湾正式成像区域时进行正式成像,出虹湾地区后完成X 频段测控体制试验,随后升轨回到100km 圆轨道。由于飞行高度低,摄动影响大,卫星近月点高度和过44.1°纬度线的高度在15~21km 变化,如图5所示。
同时CCD 相机成像对光照有要求,当地的太阳高度角必须大于15°。图6为试验轨道段卫星对应太阳高度角的计算结果。可以看出,整个试验轨道段的太阳高度角满足成像要求。
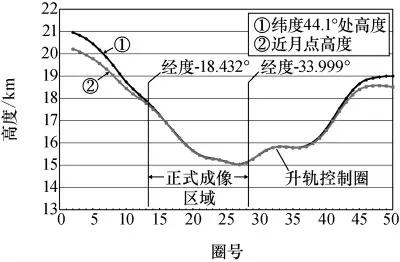
图5 试验轨道段近月点高度和卫星过44.1°纬度线时高度Fig.5 Height of perilune and the satellite height when passing latitude 44.1°
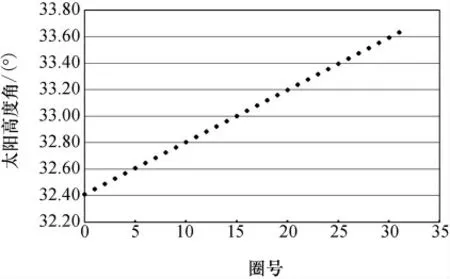
图6 试验轨道段卫星过44.1°纬度线时太阳高度角Fig.6 Sun elevation of experiment orbit
为了保证卫星安全和成像要求,还必须考虑月面高程。根据标称轨道计算,卫星第1次过虹湾上空对应的试成像区域位于北纬32.205°~37.856°,西经-7.737°~-11.892°;正式成像区域位于北纬42.6°~45.6°,西经18.20°~34.6°;升轨区域位于北纬41.963°~47.119°,西经-35.274°~-39.397°。对这几个区域的月面高程进行分析,查阅相关数据,得到的结果如表1所示。
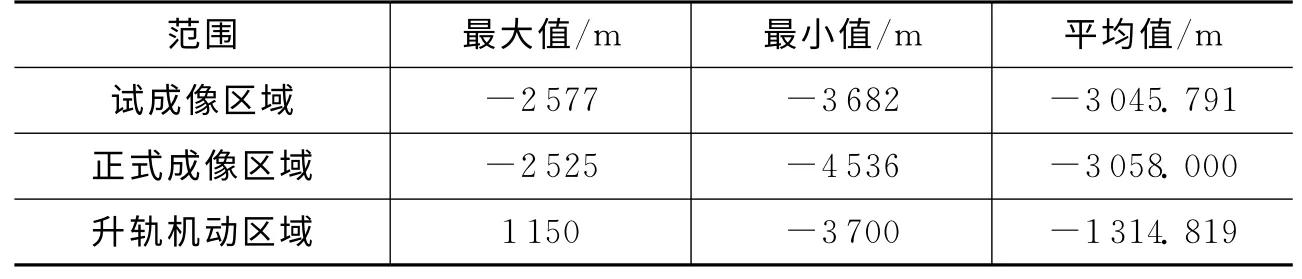
表1 试验轨道段月面高程数据Tab.1 Lunar surface altitude of experiment orbit
由表1可以看出,试成像区域和虹湾正式成像区域都是凹地,升轨机动区域也没有高地,最高处大约为1.15km,而且卫星出虹湾区域后卫星高度呈上升趋势。
从100km 圆轨道降轨控制到100km/15km 轨道,速度增量约为20m/s。控制误差按2%计算,则控后轨道的近月点高度偏差约1.7km,由100km 圆轨道的定轨误差造成的控制误差根据分析采用2km 计算,则综合随机误差为3.7km。由于月球非球形引力场的摄动,在100km/15km 轨道运行3天的时间内,最低的轨道高度比降轨控制结束时的近月点高度降低约4km,正式成像区的轨道高度降低约5km。根据“嫦娥一号”的月面高度数据,试成像区最低高度为-3.6km,正式成像区的平均高度约为-3km,最低高度约-4.5km,相机的成像高度范围是8~31km。为获得最佳成像效果并考虑到卫星的安全,试验轨道的最低高度选择为15km,这使得整个试验轨道的成像区相对月面地形的高度保持在15.8~27.3km 范围内,因此卫星距离月面高度满足卫星安全和成像要求。卫星出虹湾区域后卫星高度呈上升趋势,因此升轨机动期间卫星距离月面高度也满足卫星安全要求。
以上分析是基于“嫦娥二号”卫星的标称轨道,如果实际轨道与标称轨道有偏差,将会导致虹湾区域实际的测控条件相对标称轨道下的测控条件发生漂移。如果偏差较大,将在降轨机动前增加一次轨道维持机动,将轨道修正回标称轨道。
4 结束语
嫦娥二号任务在虹湾地区的高分辨率成像试验是一项重要的试验,也是该任务的工程目标之一。为此,卫星在进入环月100km 圆轨道后必须选择合适时机降轨成100km/15km 椭圆轨道,并在15km 近月点处对虹湾区域拍照,获取该地区的高分辨率成像信息,为嫦娥三号任务的着陆区选取提供技术依据。由于卫星系统和地面应用系统对该轨道提出了一些限制条件,加上测控资源和测控条件的限制,使得该轨道的控制非常复杂。本文对100km/15km 标称试验轨道的特性和测定轨条件进行了分析,合理选取了降轨点和升轨点,制定了合理可行的轨道控制实施方案,通过对卫星在成像区域的高度和太阳高度角的计算,分析了轨道控制误差的大小,确认了试验轨道卫星的安全,同时也满足高分辨率成像的要求。该方案已在嫦娥二号任务中成功实施,并对后续嫦娥三号任务降轨为100km/15km 椭圆轨道的控制方案有一定的借鉴意义。
[1]LEONARD D JAFFE.Blowing of lunar soil by Apollo 12:Surveyor 3evidence[J].Science,1971,171(26):798-799.
[2]TURKEVICH A L.Comparison of the analytical results from the Surveyor,Apollo,and Luna missions[C].Proceedings of the Second Lunar Science Conference,vol.2,Jan.11-14,Cambridge:The MIT Press,1971:1209-1215.
[3]THURMAN SAM W.Surveyor spacecraft automatic landing system [C].2004 Guidance and Control Conference,Breckenridge,CO,February 4-8,2004.
[4]BOWKER D E,HUGHES J K.Lunar Orbiter Photographic Atlas of the Moon [R].Houston:Lunar and Planetary Institute,1971.
[5]GADDIS L R,SUCHARSKI T,BECKER T,et al.Cartographic processing of digital lunar orbiter data[C].32ndAnnual Lunar and planetary science conference,Houston,March 12-16,2001.
[6]欧阳自远.月球探测的进展与我国月球探测的科学目标[J].贵州工业大学学报(自然科学版),2003,32(6):1-8.OUYANG ZIYUAN.International lunar exploration progress and scientific objectives of Chinese lunar exporation program [J].Journal of Guizhou University of Technology(Natural science edition),2003,32(6):1-8.
[7]HAN HONGSHUO,JIANG YUPING.Global lunar landing scheme and analyzes of objective and feasibility of manned landing in brief[J].Aerospace China,2008,(9):30-33.
[8]龙乐豪.关于中国载人登月工程若干问题的思考 [J].导弹与航天运载技术,2010(6):1-5.LONG LEHAO.On issues of China manned lunar exploration[J].Missiles and Space Vehicles,2010(6):1-5.
[9]周文艳,杨维廉.嫦娥二号卫星轨道设计 [J].航天器工程,2010,19(5):24-28.ZHOU WENYAN,YANG WEILIAN.Orbit design for Chang′E-2lunar orbiter[J].Spacecraft engineering,2010,19(5):24-28.
[10]SHANE B ROBINSON,DAVID K GELLER.A Simple Targeting Procedure for Lunar Trans-Earth Injection[C].AIAA Guidance,Navigation,and Control Conference,Chicago,Illinois,August 10-13,2009.
猜你喜欢
学与玩(2022年6期)2022-10-28 09:18:56
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
军事文摘(2021年18期)2021-12-02 01:28:54
电子测试(2018年22期)2018-12-19 05:12:58
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41
电子设计工程(2015年3期)2015-02-27 12:03:58
太空探索(2014年2期)2014-07-12 09:52:16