
10赫兹漫反射激光测距控制系统的设计与实现*
2012-01-25 07:54李祝莲李语强伏红林郑向明何少辉
天文研究与技术 2012年3期
李祝莲,李语强,伏红林,郑向明,何少辉
(中国科学院国家天文台/云南天文台,云南 昆明 650011)
云南天文台激光测距组于1998年在1.2 m地平式望远镜上建立了高指向精度、收/发共光路的卫星精密激光测距系统,并于同年正式参加国内和国际激光测距联测,测距频率为1~10 Hz,单次测距精度优于3 cm,测时设备为SR620时间间隔计数器[1-2]。传统的低频激光测距方式受到了千赫兹激光测距技术的挑战,千赫兹激光测距技术是近几年发展起来的新技术,它通过增加测距频率来增加观测数据和提高标准点精度,观测数据量的增加,可以有效地提高标准点的精度,利于卫星的精密定轨,是激光测距的发展方向之一[3]。在国家重大科技基础设施建设项目中国大陆构造环境监测网络的支持下,2010年研究组在1.2 m望远镜上成功建立了千赫兹激光测距系统,并进入常规观测。
通过成功建立上述两套激光测距系统,研究组积累了大量的激光测距相关技术和经验,包括激光卫星轨道预报、激光测距主波与回波信号探测技术、数据采集技术和测量数据处理技术等。基于已有的技术和经验,研究组新建了10 Hz激光测距系统,对激光卫星实现了成功测距试验后将测距目标定位为空间碎片,并于2010年6月7日对几个火箭残骸进行了漫反射激光测距试验,首次收到空间碎片测距回波,表明10 Hz漫反射激光测距控制系统是行之有效的。本文根据共光路激光测距的实现方式,在1.2 m望远镜上成功建立10 Hz共光路激光测距系统,可实现对激光卫星测距和漫反射目标测距,测距精度约为50 cm,文中对该系统的控制系统实现原理和方法进行了详细的阐述。
1 测距控制系统设计
漫反射激光测距与传统卫星激光测距的原理基本相同,都是通过测量激光脉冲从地面观测站到空间目标的往返时间,从而获得空间目标的距离。主要不同点是传统卫星激光测距中目标预报距离相对精确,而对于漫反射激光测距目标——空间碎片距离预报误差较大。据此对10 Hz激光测距系统作出如下设计。
1.1 硬件构建
测距控制系统如图1,包括收/发转镜、C-SPAD探测器、SR620时间间隔计数器、PIN主波探测器、激光器和控制计算机等。收/发转镜产生同步信号,控制计算机在收到该信号时刻根据用户指令选择激光发射频率和是否发送激光点火指令给激光器;激光经PIN主波探测器产生主波信号送SR620时间间隔计数器,同时送回控制计算机计算C-SPAD门控时刻,结果送距离门发生器;在回波快到达时刻由它产生门控信号给C-SPAD单光子探测器探测回波信号,并由SR620测量它与主波间的时间间隔,送控制计算机进行数据初步处理及显示,用于实时测距监测。
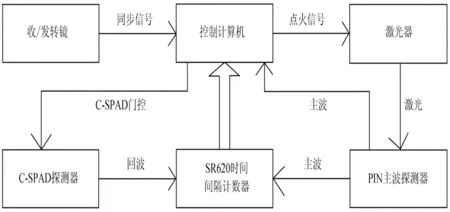
图1 1.2 m望远镜10 Hz激光测距控制框图Fig.1 Block diagram of the control system of the 10Hz Satellite Laser Ranging(SLR)on the 1.2 Telescope
1.2 电路时序图
图2为10 Hz测距控制系统电路时序图。旋转快门产生10 Hz同步信号,在每个同步信号上升沿,控制计算机产生一个激光发射指令信号给激光器发射激光;PIN主波探测器将探测到每次发射的激光信号并输出主波脉冲;一旦接收到主波信号,控制计算机就根据观测目标规定的距离信息计算回波到达时刻送距离门发生器,由它在回波快到达时刻送门控信号给C-SPAD单光子探测器。

图2 1.2 m望远镜10 Hz激光测距系统工作时序图Fig.2 Timing signals of the 10Hz SLR
2 系统主要设备控制
激光测距过程中,主要是实现激光器发射激光,主、回波探测以及时间或时刻测量,对系统这几部分的实现进行详细的阐述和分析。
2.1 激光器控制
2.1.1 激光器工作方式
系统选用SGR系列脉冲固体激光器,它具有内触发和外触发两种工作方式。在内触发方式下,将控制界面的信号切换键按到内时统状态并按照正常的激光器操作顺序进行。在外触发方式下,除了将控制界面的信号切换键按到外时统状态外,还需要向激光器提供A和B两路控制信号,A路上升沿触发闪光灯放电,B路上升沿触发Q开关,两路信号之间的延时至少设为592 μs。激光器在外触发方式下的工作时序图如图3。
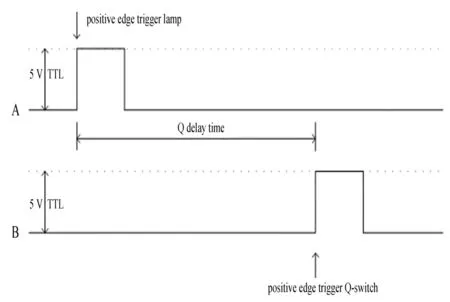
图3 激光器外触发工作时序图Fig.3 Timing signals of the external triggering of the laser
2.1.2 激光器远程控制实现
测距时,激光器工作在外触发方式下,即由计算机对激光器进行远程控制。根据激光器在外触发方式下的特点,系统采用了Altera公司的现场可编程门阵列(Field-Programmable Gate Array,FPGA)芯片[4]实现激光器的计算机远程控制,电路框图如图4。图中虚线框内的部分是在FPGA芯片上实现的,包括Nios片上系统和计数器等数字电路。计算机与FPGA之间使用RS-232串口进行通信,传达开始发射激光(start)、暂停发射激光(pause)、暂停后重新开始发射激光(re-start)和停止发射激光(stop)等指令。Nios系统采用串口中断方式响应计算机指令,中断程序如下:
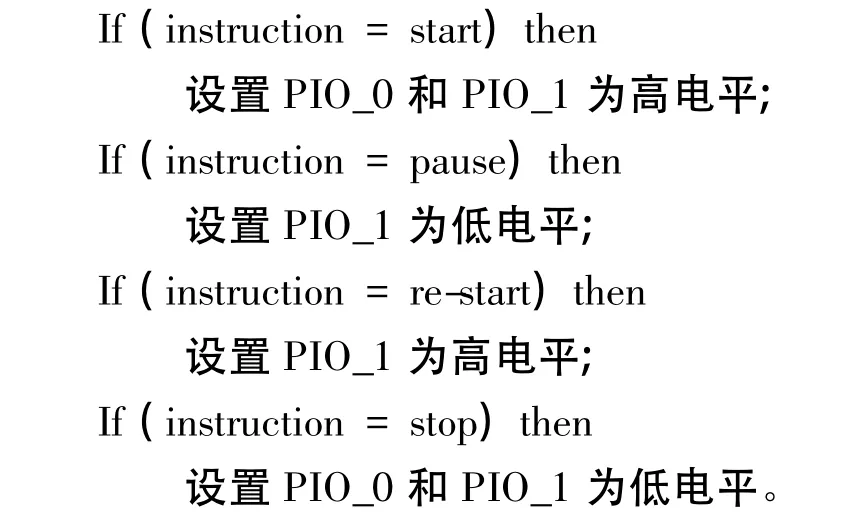

图4 激光器计算机控制框图Fig.4 Block diagram of the computer control system of the laser
再配合其它的电路可以实现激光器在测距过程中有效工作,即计算机发送start信号后,PIO_0和PIO_1信号为高电平,同时产生10 Hz点灯信号作为A路控制信号送至激光器闪灯,并将该信号送延迟计数器延迟约592 μs后产生10 Hz外触发信号作为B路控制信号送激光器发射激光;发送pause信号后,PIO_1为低电平而PIO_0依然为高电平,使B路控制信号为低电平实现暂停发射激光而继续闪灯;发送re-start信号后,PIO_0被重新设置为高电平,激光器继续发射激光;发送stop信号后,PIO_0和PIO_1均被设置为低电平,完成或结束一圈目标测距。
2.2 单光子探测器控制
由于激光卫星的轨道一般比较稳定,径向距离可以预报得较准,激光回波到达时刻可以比较准确地预报,所以卫星激光测距广泛采用距离门控制技术,即时间滤波技术,非常有效地抑制噪声的干扰。直到回波到来之前瞬间才给C-SPAD单光子探测器送开门控制信号。这样使得噪声干扰的概率减到最小,100 ns的门控精度,噪声减小为原来的10-6,使得淹没在众多噪声中的单光子回波探测成为可能[5]。
距离门控的产生原理和方式跟带激光后向反射器的测距系统[6]一致,但由于非合作目标距离预报存在较大误差,所以设计中设置了距离门控信号具有更大的变化范围,观测时,需通过大幅改变距离门控的输出时间范围有效地探测目标的回波信号。
2.3 测时设备控制
云南天文台卫星激光测距系统目前正使用的测时仪器是时间间隔计数器SR620、OTL110P事件计时器和A033-ET事件计时器。三者的性能见表1[7-9]。

表1 时间间隔计数器SR620、事件计时器OTL110P和A033-ET的性能Table 1 Performance paraneters of the SR620 time-interval counter,OTL110P event timer,and the A033-ET
A033-ET性能最好,而事件计时器OTL100P的标准偏差优于时间间隔计数器SR620。A033-ET和OTL100P具有直接测量事件发生时刻的特点和高测量精度的优势,能满足云南天文台现有多脉冲激光测距和将来激光测月对测时系统的要求。在10 Hz漫反射激光测距系统中,采用SR620即可满足测距需求,但如果使用该系统进行月球激光测距,那么需要选择OTL110P,它可以方便地在时间间隔测量和时刻测量两种工作模式之间切换。
SR620通过RS-232串口数据线与计算机连接,观测时,控制计算机发送采集数据控制命令至SR620时间间隔计数器,取回测量数据并在计算机屏幕上显示测量结果用于指示是否测到回波信息。
3 观测试验
测距系统已经用于观测,并获得一些空间目标漫反射测量数据,图5为2011年1月26日对空间碎片(目标代号:25400)的观测结果,表2给出了对观测数据的处理结果。

图5 空间碎片观测数据Fig.5 Observed data of space debris
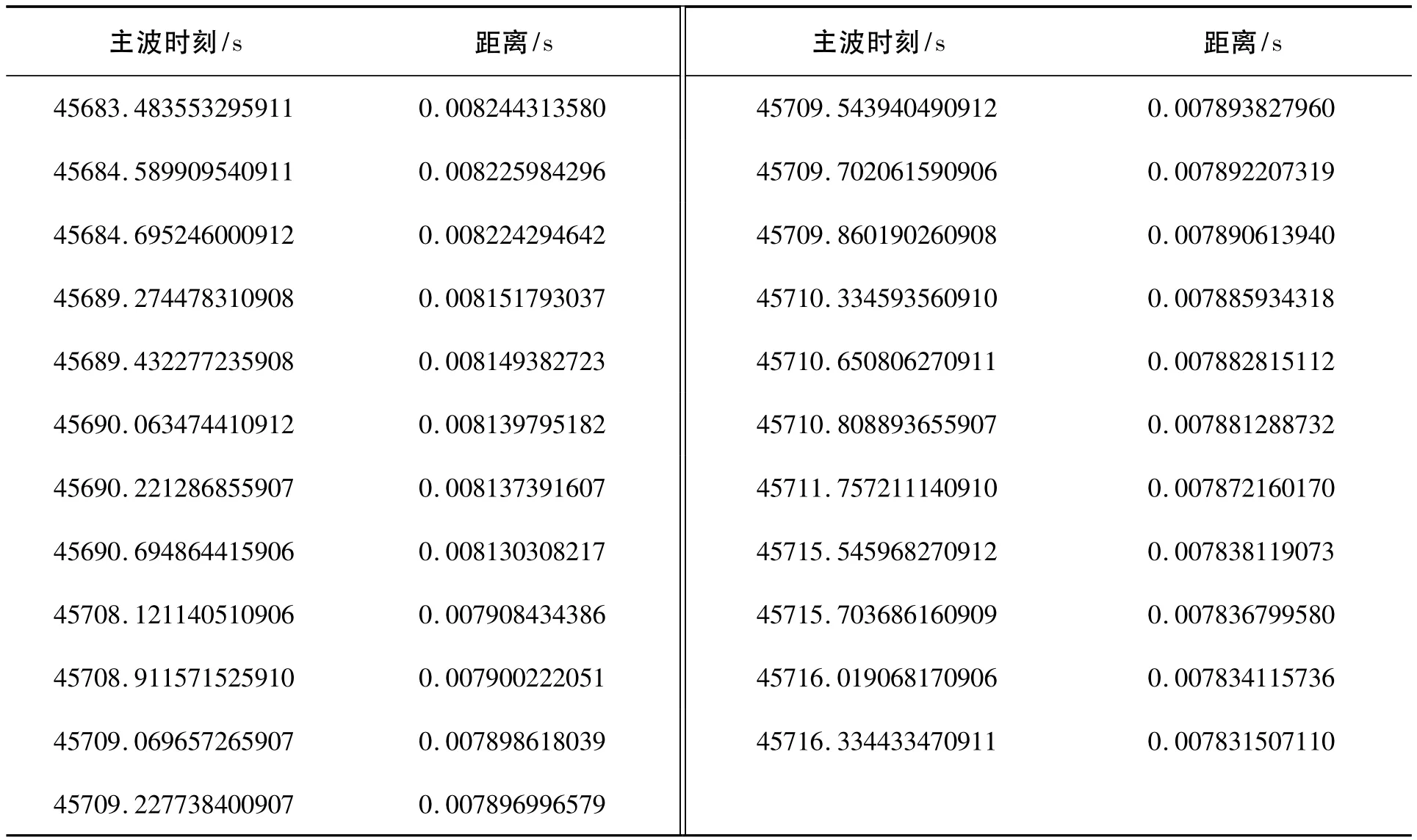
表2 对空间碎片25400的观测数据(精度约200 cm)Table 2 Observation data of the space debris 25400(about 200 cm accuracy)
4 结论
实际观测结果表明,10 Hz漫反射激光测距控制系统能有效地对空间目标进行测距工作,包括激光测距卫星和空间碎片。但因激光器脉宽较大,约为10 ns,不能达到很高的测距精度,故对激光测距卫星的观测仅仅为了检验该测距系统是否正常。由于10 Hz漫反射激光测距系统采用了高功率大能量激光器,所以可以尝试用它进行月球激光测距,只需将测时设备SR620换为OTL100P事件计时器或A033-ET事件计时器以及对测时设备控制电路和数据采集程序进行相应的变换设计即可。存在的不足之处仍然是测距精度不高,结果证明该系统具有月球激光测距能力,月球激光测距是研究组的另一重要研究课题,目标是研制出至少能达到厘米级测距精度的激光测月系统。
[1]何妙婵,郑向明,姜崇国.云南天文台激光测距中使用的光电探测器 [J].云南天文台台刊,2003(3):62-67.He Miaochan,Zheng Xiangming,Jiang Chongguo.The detectors of satellite laser ranging in Yunnan observatory [J].Publications of the Yunnan Observatory,2003(3):62-67.
[2]李祝莲,熊耀恒,何妙婵,等.云南天文台人造卫星激光测距系统原理 [J].天文研究与技术——国家天文台台刊,2008,5(3):248-252.Li Zhulian,Xiong Yaoheng,He Miaochan,et al.Principle of 1.2m telescope satellite laser ranging system [J].Astronomical Research & Technology——Publications of National Astronomical Observatories of China,2008,5(3):248-252.
[3]吴志波,张忠萍,杨福民,等.卫星激光测距回波探测成功概率统计分析 [J].测绘科学,2006,31(3):28-29.Wu Zhibo,Zhang Zhongping,Yang Fumin,et al.Statistical analysis of successful detection probability of the returns in satellite laser ranging [J].Science of Surveying and Mapping,2006,31(3):28-29.
[4]Altera-FPGA、CPLD、ASIC 和可编程逻辑 [EB/OL].[2011-10-10].http://www.altera.com.cn/?rd=en.
[5]叶叔华,黄珹.天文地球动力学 [M].山东:山东科学技术出版社,2000:91-118.
[6]李祝莲,熊耀恒.云南天文台卫星激光测距中的测时仪器 [J].天文研究与技术——国家天文台台刊,2008,5(2):161-166.Li Zhulian,Xiong Yaoheng.Timing device used in Kunming satellite laser ranging station [J].Astronomical Research & Technology——Publications of National Astronomical Observatories of China,2008,5(2):161-166.
[7]Measurements with the SR620 [EB/OL].[2011-10-10].http://www.thinksrs.com.
[8]OTL110P用户手册 [M].Observation Technology Lab.2006.
[9]Event timer A033-ET manual[M].Institute of Electronics and Computer Science.2009.
猜你喜欢
小哥白尼(趣味科学)(2021年12期)2021-03-16
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
军事文摘(2020年24期)2020-02-06
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
制导与引信(2017年3期)2017-11-02
空中之家(2016年5期)2016-02-04
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
