
长期视宁度监测DIMM系统设计方案*
2012-01-25 01:26:36辛玉新范玉峰伦宝利张瑞龙
天文研究与技术 2012年4期
辛玉新,范玉峰,伦宝利,张瑞龙
(1.中国科学院云南天文台,云南 昆明 650011;2.中国科学院天体结构与演化重点实验室,云南 昆明 650011)
1609年,伽利略用自制的望远镜指向天空,开启了现代天文学的新时代。随着望远镜制造技术的提高,主镜口径变得越来越大,其构造从折射式逐渐过渡到反射式。由于主镜越来越重,望远镜支架也从赤道式变为地平式。然而随着镜面的不断增大,人们发现虽然望远镜的聚光本领大大增强了,但是其分辨率并没有提高多少,这是什么原因造成的呢?
星星眨眼睛大家司空见惯,但这种现象却是天文学家极力避免的,因为它反映了大气视宁度的好坏,而大气视宁度的好坏直接决定了天文观测的成像质量。天文学上为此引入了一个视宁度参数r0定量描述大气造成的像质衰减。Fried在研究光波前畸变、光学分辨率问题、长曝光和短曝光传递函数中首次引入了r0参量,因此又称为Fried参量[1-2]。r0的物理本质代表了经过湍流大气的波前的空间相干直径,也就是地面望远镜实现衍射受限成像的极限口径。如果望远镜的口径D>r0,其分辨率与口径为r0的分辨率相同,这也就是为何单纯地通过增加望远镜口径无法提高分辨率的原因。因此,现在很多大型望远镜增加了自适应光学系统矫正到达像的畸变相位,从而提高分辨率。Fried的研究是在Kolmogorov湍流理论[3]和Tartatski的通过湍流介质的视线光学传播理论基础上展开的[4-5]。大气湍流理论表明,像质衰减的本质是大气折射率随机起伏对光波产生的影响,人们常常使用折射率结构常数表征大气湍流的强度。通过Fried的研究,视宁度参数r0成为衡量一个台址视宁度好坏的重要标准,广大天文技术工作者设计了各种天文仪器直接或间接得到这个参量。
1986年,Sarazin和Roddier成功研制出世界上第一台差分像运动大气视宁度监测仪DIMM,用于欧洲南方天文台的VLT(Very Large Telescope)选址工作[6]。此后DIMM便广泛应用于各种大型天文望远镜的选址工作中。使用差分像运动大气视宁度监测仪对站址进行长期的视宁度观测,有助于分析该站址的本征视宁度参量,得出视宁度随季节的变化情况以及周年变化规律,进一步得出观测站址成像质量的总体水平,无论是用于天文选址还是进行已选站址的视宁度监测都具有积极的意义。麦克唐纳天文台就在Mt.Fowlkes进行了长达13个月(2001年7月至2002年7月)的视宁度观测[7],获得了HET望远镜站址全年的视宁度变化数据;日本国立天文台也在Subaru望远镜上安装了长期视宁度监测系统,以进一步分析Subaru望远镜站址的成像质量[8]。同样,在云南丽江天文观测站部署一台长期监测视宁度的DIMM系统,得出其周年视宁度变化规律,分析和评价丽江观测站天文望远镜的成像质量。
1 系统综述
一个完整的DIMM系统应包括选星、指星、导星、图像采集与处理几部分。首先选择星等合适、天顶距较高的恒星作为目标星,然后控制望远镜指向该目标星,设置好相关参数,如星的信息(星名、星等、视赤经、视赤纬)、采集样本数、采集无效帧数上限等,然后启动导星,启动视宁度测量软件。
该系统使用的望远镜是MEADE 12″LX200-ACF望远镜,它具有较好的成像质量,较优的指向和跟踪精度,相对较轻的重量等优良特性,完全符合夜间视宁度测量的要求。并且附带有各种导星设备,如LPI、DSI等,其中使用LPI作为本系统的导星相机。通过“天空星图”(Cartes Du Ciel)这样一款免费开源的软件选择和指向目标星,根据导星镜里的图像信息,判断目标星的位置,调节望远镜使目标星进入卡焦测量CCD的视场中央,开启LPI自动导星,最后启动视宁度测量软件。图1是DIMM系统在两种观测模式(地平式、赤道式)下的示意图。表1列出了系统的相关参数。
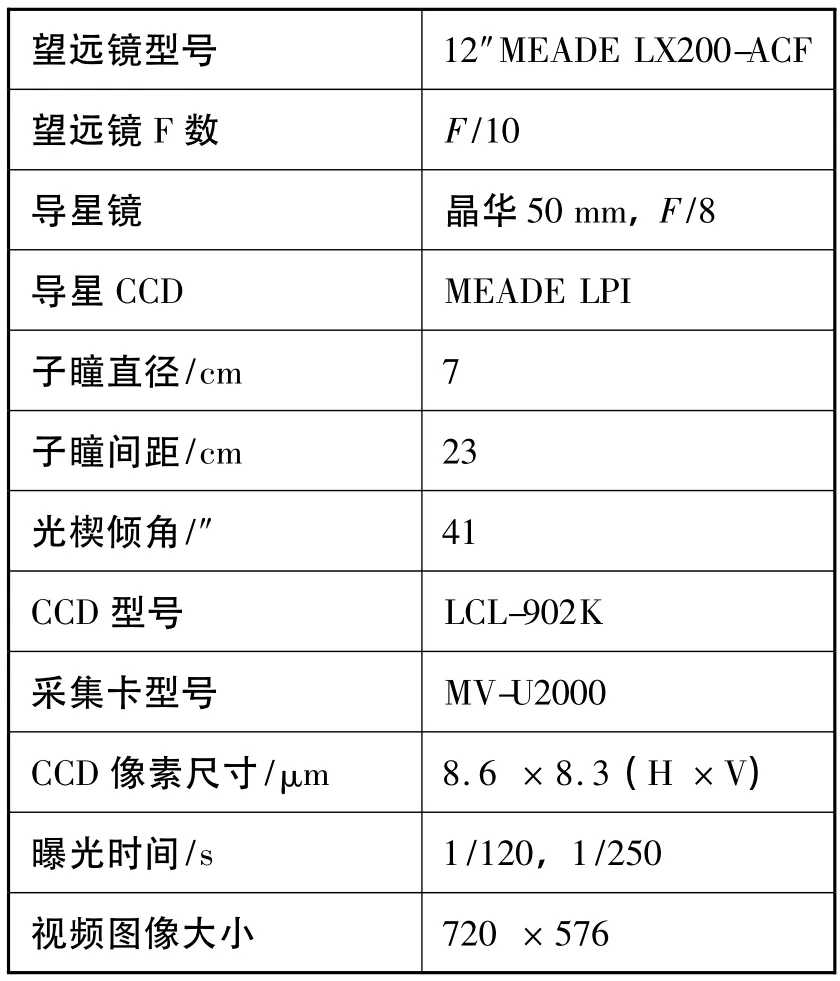
表1 DIMM系统的主要参数Table 1 The Parameters of the DIMM System
2 选星及指向部分
现在常用的星图软件有很多,例如Cartes Du Ciel、Stellarium、Autostar Suite、SkyMap等,可谓种类繁多、琳琅满目。本系统选用了界面友好、操作简单的Cartes Du Ciel,它是一款符合GNU GPL(自由软件联盟通用公共许可证)标准的星图软件,源代码完全开放,可以在Linux、Windows等系统下使用。它同时还提供了多种望远镜的驱动以及支持ASCOM(ASCOM:stands for the Astronomy Common Object Model,它是一个独立于天文软件和天文仪器的通用模块平台)。
使用Cartes Du Ciel,可以很方便地选择候选目标星,查看目标星的相关信息。设置好观测地点的经度、纬度等参数,在星图软件的天顶附近(一般要求天顶距<30°)选择一颗满足信噪比要求的亮星,使望远镜指向该目标星。然后通过导星镜CCD判断目标星位置,调节望远镜使目标星位于卡焦CCD视场中央。
3 导星部分
导星部分是为了弥补小型天文望远镜自身跟踪精度不足添加的。望远镜主镜视场为26'(26 mm目镜),导星镜视场为5°(8 mm ×50 mm导星镜)。导星软件有很多种,例如MEADE的Autostar Suite含有LPI导星软件部分、导星大师(GuiderMaster)、PHDGuiding、GuideDog、K3CCDTools等,本系统选用的是GuiderMaster,首先它是免费的;其次在功能上,除了能自动识别导星焦距和赤道仪回程等参数外,赤道仪的极轴无需对得很准,导星用的摄像头无需严格按照“水平-赤经、垂直-赤纬”这样的对应规则摆放,导星算法也很合理。
实测表明,使用LPI作为导星相机,使用GuiderMaster作为导星软件具有很好的导星效果。图2是实际测量时的自动导星软件截图。

图2 自动导星截图Fig.2 A Screenshot of the Autoguiding
4 图像采集与处理部分
DIMM系统的图像采集与处理是通过软件实现的,该软件基于Windows的Visual Studio2005,使用微软基础类库(Microsoft Foundation Classes,MFC)开发。
DIMM系统信息获取的能力和水平根本上取决于CCD本身,以及它和整个系统的匹配程度。由于夜间进行观测,光照度很低,因此对CCD灵敏度的要求很高。同时要保证底片比例尺小于1″,保证曝光时间小于10 ms,尽量保证帧频≥25 Hz。同时采集的图像要满足一定的信噪比要求,以及考虑望远镜的配重和机械接口等因素,最终选用具有超低照度的视频CCD LCL-902K。
首先,需要了解使用该款CCD能够观测到的目视极限星等。关于星等的概念由来已久,早在公元前2世纪,古希腊天文学家Hipparchus在编制星表时就把天空中肉眼可以看到的恒星分为6个等级,最亮1 mag,最暗6 mag[9]。1850年,M Pogson用光度计测量发现1等星刚好比6等星亮100倍,于是他采用下面的公式表示两颗星的星等与亮度之间的关系:

式中,m1、m2分别表示两颗星的视星等;E1、E2表示它们的亮度,即单位面积上接收的辐射流量。由(1)式容易得到:

下面具体介绍该DIMM系统极限星等的计算过程:观测目标星Pollux(双子座α星),星等1.14 mag,光谱型K0IIIb,CCD曝光时间8 ms。分析图像后得出星像重心位置读数E2=255,图像本底均值e=70,图像本底方差为σ=4,由正态分布的3σ原则可知极限星等的亮度读数E1=82。由(2)式可以求得m1=2.36。综上所述,该DIMM系统在子瞳为7 cm、曝光时间为8 ms时的可观测极限星等为2.36 mag。
当然,上述方法是一种很粗略的计算DIMM系统极限星等的方法,首先目标星应尽量选择一颗光谱型为A0V的恒星(按照MK分类系统[9]),因为A0V型恒星在全波段色差基本为0(误差<0.02 mag)[10],而其他光谱型的恒星在不同波段的色差较大。另外,选择一颗星等合适的A0V型的恒星,尽量保证星像重心的读数接近饱和。同时满足以上两个条件,计算的DIMM系统极限星等才较为准确。
下面讨论CCD与望远镜的匹配问题。为了得到更高的重心坐标计算精度,星像所占像素应该尽量多,但是为了得到更高的信噪比,星像所占像素应该尽量少,二者正好矛盾,这就需要找出一个折中的方案。对DIMM系统而言,一般认为星像最好覆盖多于2×2像元[6],例如3×3像元。而星像的大小是由视宁度和底片比例尺共同决定的,如果视宁度为2″,CCD的底片比例尺是0.67″/pixel[11],星像的大小就是3×3像元,目前使用的CCD每个像元在9~25μm,假设以10μm为例,比例尺为67″/mm,这相当于望远镜的焦距为3078 mm≈3 m。反过来,已知望远镜的焦距f=3048 mm,就可以求出CCD的底片比例尺。
望远镜的底片比例尺:在天空成一定角度α的两个天体,在焦面上的像有一定的距离L,把α/L称为比例尺(Scale),单位″/mm。显然L=fα(f为望远镜焦距),因此:

现在普遍用每像元多少角秒代替比例尺,设像元大小为K(μm),则该CCD的底片比例尺为:

已知望远镜焦长f=3048 mm,像元尺寸k=8.6μm,由(4)式计算可得DIMM系统底片比例尺为0.56″/pixel。该比例尺显然是合适的。
DIMM系统的主要原理是通过测量来自同一个点源所成的两个星像的重心坐标在x、y两个方向上的抖动方差δx、δy计算视宁度参数。δx、δy就是该点源星像在望远镜入瞳处的波前达到角方差,根据波前到达角方差与视宁度参数的关系式(5)求出r0。

式中,D是子瞳直径;d是子瞳间距。差分像测量法能有效地排除非大气因素(例如仪器跟踪、仪器晃动带来的误差)对测量结果的影响,并且具有足够的时空测量精度。
Fried参数r0的物理本质是湍流的光学相干长度,是湍流的光学本征参量。它能直观地标定大气湍流中光学成像的质量而与其他非大气因素无关,所以被作为现代大气视宁度的定义和主要观测对象[12]。大气湍流不仅有空间频率分布,也有时间频率分布,理想的选址仪器是不要滤掉任何时间频率谱。这就要求曝光时间足够短以探测到高频部分,连续观测时间足够长以包含低频部分[13]。
20世纪90年代,很多研究人员从理论和实践上对不同曝光时间得出的视宁度进行了研究,Soules等人[14]给出了在风向与两子瞳连线平行、垂直和成45°角时的影响结果,在不同风速、不同曝光时间与1 ms曝光得出的r0的比值,并得出风速ω越大,对曝光时间T的影响越大。由大气冻结时间尺度公式(6)可知风速越大,冻结时间越短。

一般认为在风速小于5 m/s时,曝光时间不要长于10 ms。例如TMT的选址用DIMM的曝光时间(加上读出时间)为6.2~6.4 ms[15],国家天文台西部选址组用的DIMM的曝光时间为5 ms。曝光时间越短采集的高频信息越丰富,但同时也会造成信噪比下降、高频噪声增多的负面效果。根据Nyquist采样定理可知,当采样频率大于信号最高频率的两倍时,就能完整地保留原始信号的信息。对DIMM系统而言,只要曝光时间短于大气湍流最小相干时间的一半即可,一般认为大气相干时间τ为10 ms,因此曝光时间可选用5 ms,连续曝光20 s左右[13]。LCL-902K具有11档快门可调,曝光时间在0.01~20 ms,帧频最大25 Hz,如果连续曝光20 s计算一个r0值,则每分钟可获得3个视宁度值。因此该DIMM系统具有较高的时间分辨率。
数据处理部分是从原始图像信息到视宁度参数r0的“系统函数”,它的优劣直接关系到最终测量结果的正确性和科学性。该DIMM系统数据处理部分见图3的软件处理流程图。
关于数据的保存部分,如果能保存原始图像信息是最好的,但是由于采样频率较高且图像本身所占磁盘空间较大,只保存了每一幅图像的两个星像的重心坐标。当达到一个样本空间后,计算出x、y方向的到达角方差δx、δy和视宁度参数r0x、r0y,以及综合两个方向的视宁度参数r0,根据目标星的天顶距,将以上视宁度参数归算到天顶并保存到文本文件中。
通过使用Windows XP系统自带的远程桌面软件,可以将控制端的屏幕信息传送到远程计算机上,这样就可以通过异地监测的形式进行观测。通过自动导星模块和远程桌面软件在DIMM系统上的应用,明显改善观测者的工作强度和工作环境,使站址视宁度的长期监测成为可能。
5 观测结果分析
2011年4月,使用DIMM系统在昆明凤凰山进行了视宁度观测,最终获得了6天的观测数据,共5290组。表2列出了统计结果。
由表2统计结果可知,4月前半个月昆明凤凰山的视宁度变化还是很明显的。例如:4月2日与4月4日虽仅相隔两天,但是FWHM均值就变化了接近1″。总体昆明凤凰山4月前半个月内的视宁度在1.3″左右波动。

图3 DIMM系统软件流程图Fig.3 Flowchart of the DIMM System Software

表2 昆明凤凰山视宁度观测结果统计Table2 The statistical result of the seeing at the Phoenix Mountain of Kunming
另外,为了验证该系统测量数据的可靠性,随机抽取了一个夜晚的视宁度观测数据与昆明凤凰山1 m望远镜的星像半宽进行了对比。由于DIMM系统时间分辨率较高(每分钟能得到3组r0),为了便于比较,在每一幅1 m镜测光图片(V波段)时间点附近选取6组r0计算星像半宽,于是得到DIMM系统与1 m镜在同一时间段内测量的星像半宽对比图(图4)。

图4 DIMM系统与1 m镜测量星像半宽数据对比Fig.4 Comparison of the FWHM data from the DIMM and the 1m Telescope
可以看出,1 m镜与DIMM系统的测量结果总体趋势基本一致,其星像半宽在数值上的差异主要由以下几方面的原因造成的:
(1)1 m镜的数据未归算到天顶,而DIMM测得的数据均归算到了天顶。
(2)1 m镜的跟踪误差。1 m镜拍摄的图片是10 min的长曝光,长时间的曝光会累积跟踪误差,导致测量的星像半宽变大。
(3)1 m镜像差的影响,导致其测量星像半宽值变大。
(4)由于1 m镜存在圆顶,圆顶视宁度的影响增大了星像半宽值。
(5)二者摆放位置不同,高度不同,也会带来测量结果的差异。
实验结果证明,该系统已经初步具备进行长期视宁度观测的能力,方案是可行的。当然要真正部署一台DIMM望远镜进行长期视宁度观测,还需要考虑诸多因素,如位置选择、设备维护、数据发布等。
6 系统有待改进和完善的地方
(1)系统软件部分有待进一步优化。求取星像重心算法可以进一步优化,分别测试不同算法的运算速度和计算精度,找出适合本系统的最优算法。
(2)系统硬件部分有待进一步优化。视频CCD读出的图像信息是视频信号,不是原始的数字信号,这本身就带来了信号失真。可以选择一款工业CCD,克服这一缺点。
(3)系统集成度不高。自动导星和视宁度测量部分是相互独立的,它们分别由不同的软件控制完成,下一步可以将二者结合起来,即在测量部分添加自动导星模块。由于本系统所用的导星软件是完全开源的,所以可以借鉴它的导星算法或自己开发导星算法。
致谢:感谢范玉峰老师的指导,感谢伦宝利老师关于软件部分的帮助,感谢张瑞龙老师有关该系统机械部分的建议。特别感谢陈培生老师关于仪器极限星等判定方法的指导。
[1]Fried D L.Statistcs of a geometric representaion of wave front distortion [J].Journal of the Optical Society of America,1965,55(11):1427-1435.
[2]Fried D L.Limiting resolution looking down through the atmosphere [J].Journal of the Optical Society of America,1966,56(3):1380-1384.
[3]Kolmogorov A N.The local structure of turbulence in incompressible viscous fluid for very large reynolds numbers[J].Mathematical and Physical Sciences,1991,434(1890):9-13.
[4]Tatarski V I.Wave propagation in a turbulent medium [M].New York:McGraw Hill Book Company,1961.
[5]Tatarski V I.The effect of the turbulent atmosphere on wave propagation [M].Israel Program for Scientific Translations,1971.
[6]M Sarazin,F Roddier.The ESO different image motion monitor [J].Astronomy and Astrophysics,1990,227(1):294-300.
[7]Edwin S Barker,Mark T Adams,Frank Deglman,et al.Determination of the intrinsic site seeing for the hobby-eberly telescope[J].Proceedings of SPIE,2003,4837:225-236.
[8]Fumihiro Uraguchi,Naruhisa Takato,Akihiko Miyashita,et al.The DIMM station at subaru telescope[J].Proceedings of SPIE,2006,6267:1-10.
[9]向守平.天体物理概论 [M].合肥:中国科学技术大学出版社,2008.
[10]Cox Arthur N.Allen’s astrophysical quantities[M].New York:AIP Press,2000:388-389.
[11]Kitchin C R.天体物理方法 [M].杨大卫,等译.北京:科学出版社,2009.
[12]刘忠,仇朴章,邱耀辉,等.差分像运动视宁度测量实验 [J].云南天文台台刊,1993(4):22-30.Liu Zhong,Qiu Puzhang,Qiu Yaohui,et al.Experiments of the differential image motion method for measureing the seeing [J].Publications of Yunnan Observatory,1993(4):22 -30.
[13]谭徽松,岑学奋,钱铜铃.用DIMM测视宁度的几个问题 [J].云南天文台台刊,2002(1):38-46.Tan Huisong,Cen Xuefen,Qian Tongling.The factors influencing the seeing measurement by the DIMM [J].Publications of Yunnan Observatory,2002(1):38-46.
[14]Soules D B,Drexler J J,Draayer B F,et al.Exposure time effects on differential r0measurement[J].Publications of the Astronomical Society of the Pacific,1996,108:817-827.
[15]Skidmore Warren,Els Sebastian,Travouillon Tony,et al.Thirty meter telescope site testing V:seeing and isoplanatic angle [J].Publications of the Astronomical Society of the Pacific,2009,121:1151-1166.
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
军事文摘(2023年10期)2023-06-09 09:15:06
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:40
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
小哥白尼(趣味科学)(2018年6期)2018-09-14 06:10:58
测绘科学与工程(2017年1期)2017-05-04 03:40:44
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:02
河北书画研究(2016年2期)2016-08-24 02:14:50
新农业(2016年18期)2016-08-16 03:28:27
太空探索(2016年7期)2016-07-10 12:10:15
