客运专线计算机联锁仿真系统的开发
2012-01-16 08:25穆中华李丽兰
城市轨道交通研究 2012年1期
穆中华 李丽兰
(郑州铁路职业技术学院,450052,郑州∥第一作者,副教授)
计算机联锁是实现车站“运行指挥,安全防护”功能的控制系统,是我国车站信号设备的发展方向。计算机联锁课程是信号专业学生的必修课,理论性、实践性都非常强。目前,国内计算机联锁设备生产厂家主要是铁道部指定的四家,技术已较成熟,但是受产权限制,各厂家核心技术是保密的。若建设一个小型站场的计算机联锁实验系统,价格昂贵,动辄100多万元,作为教学和实验设备一次性投入过大,性价比较低,也无法满足学习动手操作的需要。另外,近几年我国高速铁路发展迅速,计算机联锁增加了很多新功能。因此,迫切需要开发计算机联锁仿真系统,用仿真的方法来实现信号、进路和道岔之间的联锁关系,以及在客运专线中的应用方式,以满足教学需要。
1 现有计算机联锁仿真软件的不足
(1)现有计算机仿真软件多以功能仿真为主,未明确区分上位机和下位机,其结构与真实联锁不符。
(2)现有计算机仿真软件大多不带I/O(输入/输出)功能,即无法采集驱动信号设备;或者带I/O功能的仿真软件过度依赖信号设备,无法独立设置条件运行。
(3)由于装备的变化,信号设备功能划分也有变化。如:改变运行方向(以下简为“改方”)功能,在既有模式中由改方电路或计算机联锁来完成,而在客运专线标准中由列控中心来完成,且由计算机联锁来操作。
(4)计算机联锁存储数据有变化。如:计算机联锁不但要获取接近离去区段的状态,还需要区间闭塞分区的状态,用以送给RBC(无线闭塞中心)使用。
(5)由于标准的变化,计算机联锁的功能有所变化。如:计算机联锁增加了开灯/关灯模式,分别适用于列控C2和列控C3模式。
2 客运专线联锁仿真软件的开发
本计算机联锁系统以武广客运专线技术为蓝本,实现适用于客运专线的联锁系统。计算机联锁仿真软件采用模块化编程,由上位机软件和下位机软件构成。
2.1 上位机软件的开发
上位机是联锁与操作人员的人机接口,主要完成人机对话功能。操作人员通过上位机操作下位机。上位机一方面接收来自控制台车站值班员的操作命令,将其转换成约定的格式发送给联锁机;另一方面接收联锁机提供的监控对象的各种表示信息,并转换成显示器能够接收的格式。上位机软件采用模块化编程思想和面向对象技术,使用C++Builder 6开发环境,软件结构清晰,功能完善。上位机软件主要分为显示模块、操作模块和通信模块等。
2.1.1 显示模块
上位机软件采用图形化的显示界面,其站场状态必须与下位机保持一致,实时性要求较高。本软件采用定时刷新方式(周期为250ms)动态更新站场状态。虽然站场图形不断更新,但要求有一个稳定的显示画面,为此上位机软件采用双缓冲技术,保证了画面重画时不会出现闪烁现象。显示模块流程如图1所示。

图1 显示模块流程
2.1.2 操作模块
上位机作为人机接口,完成人机交互的工作,接收操作人员指令。操作部分采用消息驱动机制,捕捉鼠标和键盘消息,驱动事件处理函数。操作模块流程如图2所示。

图2 操作模块流程
2.1.3 通信模块
通信模块负责上位机与下位机的数据收发,采用UDP通信协议。数据发送采用250ms定时发送方式;接收采用事件驱动方式,当通信端口接收到数据后驱动数据处理函数。模块发送和接收流程如图3所示。
2.2 下位机软件
下位机软件是联锁软件的核心,主要实现联锁逻辑的运算。本下位机集逻辑运算、站场操作、状态记录和回放、室外仿真等于一体。软件采用模块化编程思想和面向对象技术,使用Visual Studio开发环境,C++语言开发,结构清晰,功能完善。

图3 发送和接收流程
下位机软件主要分为逻辑运算、环境仿真、采集和驱动、显示和操作、记录和回放、通信等模块。
2.2.1 逻辑运算模块
逻辑运算模块完成全站联锁关系的运算,采用联锁表的方式进行逻辑计算。即由联锁表生成配置文件,在运算过程中按照联锁关系采集和驱动相应设备,当设备状态与联锁表状态完全吻合后开放信号,进路办理成功。
逻辑运算模块流程包括办理进路流程和进路检查流程,如图4、5所示。逻辑运算模块与安全息息相关,所以采用了安全编程技术,对所有变量进行编码;并向安全侧赋初值,运算过程中实时进行数据校验,保证其安全性。

图4 办理进路流程

图5 进路检查流程
2.2.2 环境仿真模块
由于联锁软件在执行过程中需要采集和驱动很多开关量,而软件在单机上运行时不具备该条件,故在软件中加入环境仿真模块,以此来模拟该站继电器的状态,保证联锁软件在任何环境下都可以运行。
环境仿真部分采用二级缓冲技术,即将该模块作为联锁软件的二级缓冲区。联锁软件采集的开关量首先存于该模块中,再由联锁逻辑运算模块读取;联锁输出的开关量首先存于该模块中,再由该模块驱动继电器(如图6所示)。

图6 环境仿真的二级缓冲技术
采用这种方式的优点是:①在无外部设备时,该模拟作为外部设备的仿真,可以操作和改变其状态,满足联锁软件的运行条件,保证联锁软件正常运行;②在有外部设备时,该模块执行对外采集和驱动的处理,联锁软件及其配置文件无需作任何变动,适应能力强;③环境仿真模块中加入设备仿真功能,可用软件模拟设备动作过程,如在道岔动作时加入延时来模拟道岔动作过程。
环境仿真模块流程如图7所示。
2.2.3 采集和驱动模块
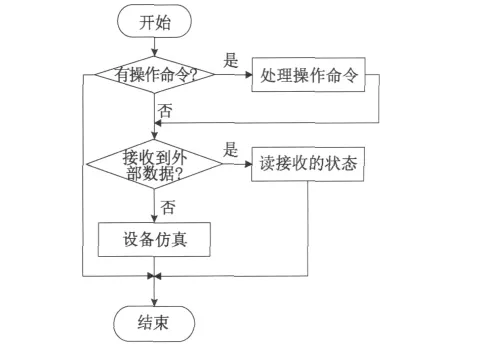
图7 环境仿真模块流程
采集和驱动模块负责联锁逻辑运算模块的输入和输出。由于联锁软件所有对外要采集和驱动的状态均由环境仿真模块完成,因此采集和驱动模块只需完成与环境仿真模块的数据交换即可。采集和驱动模块定时(周期为250ms)对仿真环境模块执行采集和驱动操作,实时性较高。采集和驱动模块流程如图8所示。

图8 采集和驱动流程
2.2.4 显示和操作模块
为更清晰地展示上位机与下位机的关系,下位机软件除完成运算外,还可显示站场状态,并可对站场进行状态设置、设备单操、办理进路等操作,完全复示上位机的显示和操作。
站场状态采用列表的方式进行显示,每个列表中对不同类型的数据以不同的底色区分,清晰明了;站场数据的显示以周期250ms实时更新。
对站场设备的操作使用了消息驱动机制,采用鼠标单击、双击、鼠标右键菜单等方式,操作简便。
2.2.5 记录和回放模块
下位机软件集维修机的功能于一体,可实现状态的记录和回放。状态记录采用增量保存的方式对记录的数据进行存储,既保证信息的完整性,又确保了存储的数据量最小。站场上任何设备状态的变化和任何操作事件都会被记录和回放模块捕捉,并记录变化部分状态,以此实现存储量的最小化。回放功能与记录过程相反:该模块根据用户选择的时间,将记录文件中该时间之前的记录逐条计算,得出该时间的实际状态,并由显示和操作模块进行显示。记录和回放模块流程如图9所示。
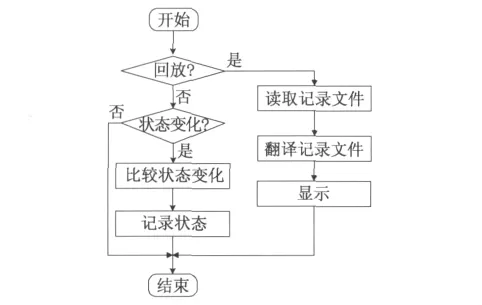
图9 记录和回放模块流程
2.2.6 通信模块
通信模块完成联锁软件与上位机、CTC(分散自律调度集中)、列控中心和RBC的通信,采用UDP通信协议。数据发送采用250ms定时发送方式;数据接收采用事件驱动方式,当通信端口接收到数据后驱动数据处理函数。发送数据流程和接收数据流程如图10、11所示。

图10 发送数据流程
客运专线的联锁系统不仅要与CTC通信,还要与列控中心、RBC等列控设备通信。本联锁软件预留了这部分接口,适合在任何线路上使用。

图11 接收数据流程
3 仿真系统实现的主要功能
3.1 基本联锁功能
(1)开放信号功能:可使用鼠标在上位机上直接按压始终端按钮选择进路,也可使用下位机输入进路始终端按钮,办理列车进路、调车进路和长调车进路,符合联锁条件后信号开放。信号因故关闭,但开放条件仍然满足,可以重复开放信号。在下位机选中相应防护信号机,点击右键菜单中“开放引导信号”,可开放引导信号。
(2)进路解锁功能:进路建立后,可使用“总取消”、“总人解”解锁进路;可用下位机模拟列车正常占用、出清,进路解锁;轨道电路光带保留,可使用“故障解锁”方式解锁进路。
(3)道岔的单操单锁功能:在人机界面上,使用鼠标右键,选择“总定(或总反)”,可以单扳道岔;需要对道岔进行单独锁闭时,使用鼠标右键,选择“道岔区段锁闭”即可。
(4)改变运行方向功能:根据列车运行情况,可采用正常改方和辅助改方两种方法改变运行方向。正常改方时,发车站直接办理发车进路即可;辅助改方时,发车站按压“总辅助”+“发车辅助”按钮,接车站按压“总辅助”+“接车辅助”按钮,即可改变运行方向。
3.2 拓展功能
(1)信息自动提示功能。上位机设有信息自动提示框,当有操作时,提示当前操作,自动显示上位机和下位机通信状态,如“通信正常”或“通信中断”。
(2)记录保存功能。该软件可实现记录自动保存和手动保存:系统在每天的00:00自动保存当天记录;单击界面 “保存记录”按钮,当前内存中的记录即可存到文件中。
(3)回放再现功能。该软件可查看当前记录和历史记录。查看当前记录:系统默认当前记录,即内存中的记录,拖动时间轴上的滑块,在主界面各表中显示当前时间的记录。查看历史记录:通过下拉式列表框选择记录文件,列表框列出当前存在的记录文件,选择一个文件后,即可拖动时间轴的滑块查看记录。
(4)系统设置功能。为使软件适用于既有线路和客专线路,可以对软件中的参数进行设置,包括接近离去区段的个数、股道延时解锁的时间、进路延时解锁的时间和联锁信号开灯模式等。
4 仿真系统的特色
4.1 上位机软件的特色
(1)图形化界面,清晰明了。
(2)站场图形和配置数据采用配置文件,使该软件具有通用性,可用于任何车站。
(3)充分利用鼠标功能,用右键菜单代替部分按钮,使操作简便,符合日常使用习惯。
4.2 下位机软件的特色
(1)使用文件的方式配置数据,使软件具有通用性,通过更换配置文件,可方便地生成其他站联锁软件。
(2)具备现场环境仿真功能,可不依赖于室外设备而独立运行,并可仿真室外设备。
(3)采用二级缓冲技术,实现了真实室外环境和仿真环境自适应功能,无需任何更改即可自动切换。
(4)具备显示和操作功能,上位机的所有操作和显示在下位机上均可实现,可在无上位机或上位机故障的情况下继续使用。
(5)集维修机的功能于一体,可实现记录及再现站场状态和操作,用一个软件实现了整个联锁系统的功能。
(6)具备与列控中心、RBC等列控设备通信的功能,适合在任何等级的线路上使用。
(7)按照客运专线标准,联锁增加了开/关灯模式,在列控C3模式时联锁处于关灯模式,在列控C2模式时处于开灯模式。
(8)软件开发过程中秉承故障导向安全的思想,结合安全编程技术,使软件具有较高的安全性。
(9)采用消息机制和多线程技术,保证了软件的实时性。
5 仿真软件的应用前景
计算机联锁仿真系统采用仿真的方法实现信号机、进路和道岔之间的联锁关系,人机界面贴近真实的联锁设备,可满足铁路院校和电务职工培训基地的教学需要。另外,该软件采用二级缓冲技术,具备真实室外环境和仿真环境的自适应能力,当室外设备条件具备时,无需做任何更改即可直接驱动采集室外设备,建成真实的计算机联锁站。
[1]赵志熙.微机联锁系统技术[M].北京:中国铁道出版社,1995.
[2]王选.软件设计方法[M].北京:清华大学出版社,1992.
[3]吴芳美.铁路安全软件测试评估[M].北京:中国铁道出版社,2001.
[4]TB/T 3027—2002 计算机联锁技术条件[S].
[5]TB/T 2307—1992 电气集中各种结合电路技术条件[S].
[6]何梅芳,段武,开祥宝,等.TYJLⅡ计算机联锁控制系统研究报告[R].北京:铁道科学研究院,1997.
[7]王晓东.数据结构与算法设计[M].北京:电子工业出版社,2002.
[8]李铁民,杨静,张素华.软件设计技法[M].北京:中国林业出版社,2000.
猜你喜欢
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
铁道通信信号(2016年12期)2016-06-01
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
测绘科学与工程(2016年5期)2016-04-17
电子器件(2015年5期)2015-12-29
学习月刊(2015年3期)2015-07-09