
基于背景迭代搜索的高分辨遥感图像汽车检测
2011-12-27 06:40吴小波沈金祥
自然资源遥感 2011年4期
吴小波,杨 辽,沈金祥,王 杰
(1.中国科学院新疆生态与地理研究所遥感与GIS应用自治区重点实验室,乌鲁木齐 830011;2.中国科学院研究生院,北京 100049)
基于背景迭代搜索的高分辨遥感图像汽车检测
吴小波1,2,杨 辽1,沈金祥1,2,王 杰1,2
(1.中国科学院新疆生态与地理研究所遥感与GIS应用自治区重点实验室,乌鲁木齐 830011;2.中国科学院研究生院,北京 100049)
提出了一种基于高分辨率卫星遥感图像检测汽车的新方法——背景迭代搜索(Background Iterative Search,BIS)算法。该算法首先利用背景与目标的局部差异,用距离作为判别准则逐步迭代搜索并去除背景,根据汽车的物质特性初步检测汽车;然后采用动态双峰阈值分割方法,利用全局信息把道路和非道路分开,并根据形状特征粗略提取道路;最后利用道路信息约束初步检测的汽车,得到最终的汽车检测结果。通过使用IKONOS和QuickBird卫星遥感数据进行实验,验证了BIS算法的有效性。
高分辨率卫星遥感;汽车检测;背景迭代搜索
0 引言
以人工方法为主的传统汽车监控手段越来越不能满足新形势下交通监测的需要,基于计算机智能、模式识别、图像分析、视频监视和雷达测速等高科技手段的智能监测系统的应用,将是未来汽车监测的必然趋势。汽车监测的相关数据可以应用在城市道路规划,城市噪声、大气污染评价与模拟等方面,在军事侦察方面也有广泛的应用前景[1]。因此,自动而快速的汽车检测已成为一个重要而有意义的研究课题。
传统的汽车监测系统主要依靠一系列的传感器(例如布置在城市各个角落的摄像机),这些传感器监测汽车往往是准确的、实时的,但只能观察到一个点的交通状况;而空对地的传感器能提供某地区整体的交通状况信息。随着空间对地传感器的发展,出现了很多利用不同传感器对汽车进行检测的方法,例如雷达传感器[2-3]、热红外传感器[1,4]、航空光学传感器[5-6]等,但很少有利用搭载在卫星上的高分辨率传感器进行汽车检测的文献报道;而高分辨率卫星遥感图像的空间分辨率可达到cm级,从理论上讲汽车是可以检测的(例如QuickBird数据全色波段空间分辨率为0.61 m,而一般汽车的长度都大于3.5 m,宽度也大于1.5 m,汽车在QucikBird高分辨率遥感图像上可占据10~40个像元不等)。
传统的汽车检测方法可以大致分为显性和隐式2类方法[7]。显性的方法是把汽车描绘成一个三维模型,突出汽车的几何特征,通过影像的阴影、亮度去获取汽车的边缘或者挡风玻璃[1,6-9]。由于汽车目标在高分辨率卫星遥感图像上仍然太小,对汽车的特征不容易检测,而且汽车在图像中的位置和姿态变化很多,故很难建立一个能把所有汽车检测出来的几何模型。隐式的方法则是通过选择训练样本,突出汽车的物质特征,利用影像的灰度值和纹理特征,通过计算机学习、训练一些规则进行汽车检测[10-16]。虽然这种方法克服了几何建模的困难,但汽车目标在高分辨率卫星遥感图像中亮度变化很大,由于同物异谱的存在,仅仅依靠像元本身的亮度值进行分类很容易和其他目标混淆。因此,用传统的方法从高分辨卫星遥感图像中检测汽车难以达到理想的效果,必须寻找新的途径。
针对上述情况,本文提出了一种自动而高效地从高分辨卫星遥感图像中检测汽车的新方法——背景迭代搜索(Background Iterative Search,BIS)。在高分辨率遥感图像中,城市区域下垫面目标复杂,汽车虽目标小,但和背景差异较大,充分利用背景与目标的局部差异,基于BIS方法、利用局部信息可以有效地把背景和疑似汽车分开,根据汽车的物质特性初步检测出汽车目标;基于动态双峰阈值分割方法、利用全局信息把道路和非道路分开,根据形状特征粗略提取道路;最后用道路信息对初步检测出的汽车目标进行约束,得到最终的汽车检测结果。利用本文提出的基于BIS的方法能有效地去除背景,达到检测汽车的目的,实验证明对 QuickBird、IKONOS等高分辨率卫星遥感影像中的汽车检测都能收到较好的效果。
1 BIS算法
BIS算法利用背景与目标之间的局部差异,用绝对距离作为判别准则,逐步迭代搜索背景,直至把目标和背景分开。该算法和Mean_shift类似,本质区别在于依据不同的标准对特征空间进行聚类。它先对当前点进行标号,移动该点到周围领域中与之进行距离判别,如果满足dxy<ε(ε为距离阈值;距离dxy的计算方法见式(1)),则赋予同一标号;然后再以任一已标号的像元为新的起点,继续迭代搜索,直到搜索的像元个数不再增加,则结束迭代。

式中,dxy为绝对距离;x为当前像元值;y为邻域像元值。
引入一个与图像D行列相等的分割栅格矩阵S,初始值为0,从D中的第一个像元开始进行背景迭代搜索(具体处理步骤如图1所示)。

图1 归类树Fig.1 Clustering tree
(1)先对当前点A进行标号(图1中第1层),称当前点为“父节点”;计算当前点的邻域(通过邻域阈值η获取邻域范围,对于汽车小目标,邻域阈值不宜过大,一般取η=1表示的邻域范围)为第2层,称为“子节点”。
(2)依据式(1)计算子节点与其父节点之间的距离dxy,根据式(2)标记邻域像元与父节点相似的像元,即

式中,max为求S中的最大值。
(3)从子节点中任一flag=1的像元开始执行步骤(2),如果迭代的像元数目不再增加(如图1中直到找到B为止),则停止迭代。
(4)把步骤(1)~(3)确定的flag=1像元记录下来,依据式(3)更新S矩阵中相同位置的值。
(5)对S中未被赋新值(S(x,y)=0)的像元继续执行步骤(1)~(4),直到S中的所有像元被赋新值,则结束迭代。
由BIS算法的原理可知,S(x,y)=1即是背景,然后对每一个非背景对象进行了标号。由于采用多次迭代过程,新算法显然有很多的迭代次数;但研究发现,由于未标号的样本数是逐次减少的,新方法并未显著增加计算的复杂度。
2 汽车检测流程
利用BIS算法,本文提出从高分辨卫星遥感图像中检测汽车的技术流程(图2)。
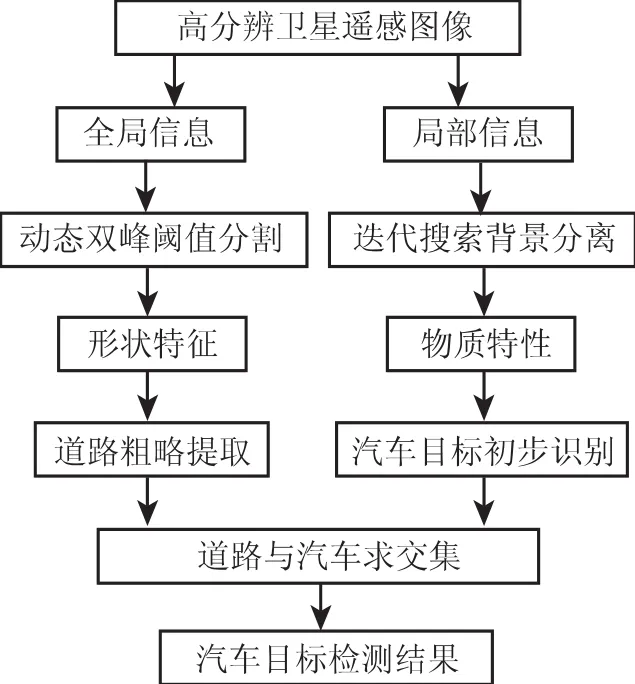
图2 汽车检测流程Fig.2 Flow chart of car detection
先采用动态双峰阈值分割方法根据全局信息有效地把道路和非道路分隔开,进而利用形状特征初步提取道路;再根据图像数据的局部信息采用BIS方法有效地把背景和目标分开,根据汽车的物质特性初步检测疑似汽车目标;最后以道路为约束条件检测出道路上的汽车目标,得到最终的汽车目标检测结果。下面以IKONOS遥感图像为例具体说明汽车检测流程。
2.1 道路粗略提取
汽车目标一般分布在道路等背景上,利用这一先验信息对汽车进行检测,先滤掉不在道路上的虚警目标,以提高汽车检测率。对道路提取虽然经过几十年的研究,取得了一些成果,但由于高分辨率遥感图像中道路的复杂性和人工智能技术的不成熟,目前该方面的研究还不是很完善。值得庆幸的是,本文要求的道路只是粗略的道路目标,目的是为了过滤那些非汽车的虚警信息,因此本文中的道路自动提取采用简单的动态双峰阈值分割方法,使道路与其周围的其他目标分隔开,再根据形状特征(面积和长宽比)提取道路。
图3(左)为IKONOS原始图像,空间分辨率为1 m,图像大小为400像元×400像元;图3(右)为IKONOS原始图像的灰度直方图。

图3 IKONOS原始图像(左)及其直方图(右)Fig.3 IKONOS original image(left)and its histogram(right)
通过动态拖动图3(右)中的红色线和绿色线,对“红色线”和“绿色线”之间的图像亮度值进行线性拉伸来增强IKONOS原始图像(图3(左)),增强结果见图4(左)。提取图4(左)中等于0的数据,然后根据面积特征提取道路(即面积最大的对象为道路),最后经过数学形态学膨胀运算得到道路粗略提取结果(图4(右))。

图4 IKONOS图像增强结果(左)及道路粗略提取结果(右)Fig.4 The result of image enhancement(left)and preliminary extraction of road(right)
2.2 汽车目标检测
由于汽车目标像元亮度值与周围背景亮度值相差较大,依据实验结果,为了保持高检测率和低虚警率之间的平衡,对于 IKONOS图像,距离阈值ε的取值范围为[3,8]。本次实验邻域阈值取η=1,ε=4。同时经过分析,IKONOS图像中的汽车占有像元个数为[5,30],最后通过限定像元个数的汽车物质特性检测,得到汽车目标初步检测结果(图5,边缘线来自于对图4(右)的Canny算子检测结果)。对图4(右)和图5求交集,得到最终的汽车目标检测结果(图6)。

图5 汽车目标初步检测结果Fig.5 Preliminary detection of car
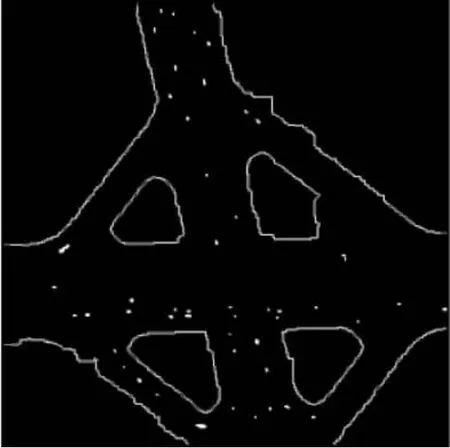
图6 汽车检测结果(1)Fig.6 The result of car detection(1)
3 实验结果与分析
3.1 QuickBird图像实验结果
另外截取了一景QuickBird高分辨率卫星遥感图像(图7,空间分辨率为0.61 m,图像大小为400像元×400像元),用以验证BIS算法的有效性。距离阈值ε的取值范围为[8,14]。本次实验邻域阈值取η=1,ε=10,QuickBird图像中的汽车占有像元个数为[10,40],最后通过汽车所占像元个数和道路约束条件,得到汽车检测结果(图8,边缘线来自于对道路层的Canny算子检测结果)。

图7 QuickBird原始图像(道路)Fig.7 QuickBird original image(road)
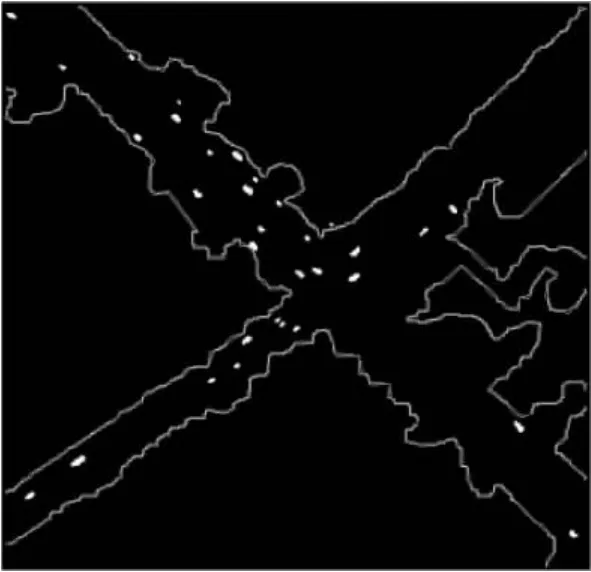
图8 汽车检测结果(2)Fig.8 The result of car detection(2)
3.2 实验结果分析
从实验结果图6(对应图3(左)IKONOS原始图像)和图8(对应图7QuickBird原始图像)可以看出,在利用道路全局信息的约束条件下,本文方法对汽车的检测可以达到预期目标;绝大多数汽车分布在道路上,只有少量汽车分布在其他地方(如:停车场),但目前对停车场等全局信息的提取是比较困难的;同时,研究发现距离阈值ε对检测率影响很大,因此有必要分析本文算法对全局信息的依赖程度以及对距离阈值的敏感程度。
这里给出2种定量分析的指标:①汽车检测率——正确检测的汽车个数除以实际的汽车个数;②虚警率——检测的虚警个数除以检测的汽车总数。为了研究BIS算法对距离阈值ε的敏感程度,对检测率与距离阈值ε之间的关系进行了分析(图9)。

图9 检测率和虚警率与距离阈值关系Fig.9 The relationship between detection rate & false alarm rate and distance threshold
由图9(a)可以看出,对于QuickBird图像,汽车检测正确率随着距离阈值的增大会先增加后减小。当距离阈值过小时,由于汽车连续分布(见图7方框内),太小的阈值不能有效地把汽车分开而使其连在一起,以致大于40个像元,在后面的汽车物质特性检测中被删除;相反,阈值过大,汽车目标就会被当做背景搜索而去除。因此,距离阈值ε的取值范围在[8,14]为宜。
由图9(b)可以看出,对于IKONOS图像,汽车检测正确率随着距离阈值的增大而减小。这是由于IKONOS图像分辨率相对QuickBird较低,汽车目标占有像元少,阈值过小(小于3),则背景无法完全搜索;相反,距离阈值增大就会把小目标滤掉。因此,距离阈值ε的取值范围在[3,8]为宜。研究发现,上述阈值范围对高分辨率IKONOS和QuickBird遥感图像具有通用性。
另外,还分析了BIS算法对全局信息的依赖程度。全局信息的作用是减少虚警,本文算法可以通过动态改变距离阈值对虚警率进行调控,因此建立了虚警率(有、无道路全局信息)与距离阈值ε之间的关系(图9)。不论是QuickBird还是IKONOS图像,由于在道路背景上汽车目标相对于虚警目标有更强的空间异质性,虚警目标会逐渐被当做背景搜索,所以2种虚警率都会减小;但在全局信息约束的条件下虚警率下降更快,以致于最后没有虚警目标。同时可以看到,全局信息对虚警率的影响随着距离阈值的增加逐渐减小,最后2种虚警率会趋于一致。这说明当全局信息无法有效提取时,在保证检测率的前提下,可以折衷选择大一些的距离阈值来降低虚警率(如图10是一个停车场汽车分布图,折衷选择距离阈值取ε=12、η=1的汽车检测结果见图11)。

图10 QuickBird原始图像(停车场)Fig.10 QuickBird original image(park)

图11 汽车检测结果(3)Fig.11 The result of car detection(3)
以上3个汽车检测结果(图6、图8和图11)的 详细指标见表1。

表1 汽车检测评价Tab.1 Evaluation of car detection
从表1可以看出,使用QuickBird图像的检测率和效率(结果2(图8))明显高于使用IKONOS图像的检测率和效率(结果1(图6));在没有全局信息约束的条件下,虚警率显著增加(结果1(图6)和结果2(图8));对于结果3(图11),由于距离阈值的增大,本文 BIS算法对汽车的检测率也达到了81.25%,而虚警率只有 14.95%。
4 结论
(1)本文在研究高分辨率卫星遥感图像背景与汽车目标特性的前提下,充分利用数据的局部信息,提出了一种从高分辨率卫星遥感图像中有效检测汽车的新方法——背景迭代搜索(BIS),丰富了汽车检测的监测系统。
(2)在用BIS算法初步识别汽车的基础上,使用动态双峰阈值分割方法、利用全局信息把道路和非道路分开,进而通过道路对疑似汽车的目标进行约束,减小虚警率,形成最终的汽车检测结果,收到了较好的效果。
(3)本文提出的BIS方法的优点是:①该方法不像其他方法那样需要预先提供汽车姿态等初始信息,阈值的设置范围对卫星遥感图像具有通用性,所以自动化程度高,且实用性强,准确性高,算法速度快;②设计过程中综合考虑了汽车本身的特性以及背景与目标的局部差异,并利用道路全局信息约束检测汽车,扩展了汽车检测的方法体系;③其他方法只停留在雷达、热红外、航空光学遥感数据的基础上,本文方法则以高分辨卫星遥感数据作为数据源进行了有益的尝试。
(4)本文方法在全局信息无法提取或者提取效果欠佳时,对降低虚警率还没有找到好的办法,有待进一步研究。
[1]Hinz S,Stilla U.Car Detection in Aerial Thermal Images by Local and Global Evidence Accumulation[J].Pattern Recognition Letters,2006,27(4):308 -315.
[2]Wei Y,Hinz S,Stilla U.Automatic Vehicle Extraction from Airborne LiDAR Data of Urban Areas Aided by Geodesic Morphology[J].Pattern Recognition Letters,2010,31(10):1100 -1108.
[3]Meyer F,Hinz S,Laika A,et al.Performance Analysis of the Terra-SAR - X Traffic Monitoring Concept[J].ISPRS Journal of Photogrammetry& Remote Sensing,2006,61(3-4):225-242.
[4]Kirchhof M,Stilla U.Detection of Moving Objects in Airborne Thermal Videos[J].ISPRS Journal of Photogrammetry & Remote Sensing,2006,61(3 -4):187 -196.
[5]Grabner H,Nguven T T,Gruber B,et al.On - line Boostingbased Car Detection from Aerial Images[J].ISPRS Journal of Photogrammetry & Remote Sensing,2008,63(3):382 -396.
[6]Zhao T,Nevatia R.Car Detection in Low Resolution Aerial Images[J].Image and Vision Computing,2003,21(8):693 -703.
[7]Hinz S.Detection and Counting of Cars in Aerial Images[J].International Conference on Image Processing,2003(3):997 -1000.
[8]Moon H,Chellappa R,Roselfeld A.Performance Analysis of a Simple Vehicle Detection Algorithm[J].Image and Vision Computing,2002,20(1):1 -13.
[9]Hinz S,Schlosser C,Reitberger J.Automatic Car Detection in High Resolution Urban Scenes Based on an Adaptive 3D - model[J].GRSS/ISPRS Joint Workshop on Data Fusion and Remote Sensing over Urban Areas,IEEE,2003(2):167 -171.
[10]Papageorgiou C,Poggio T.A Trainable System for Object Detection[J].International Journal of Computer Vision,2000,38(1):15 -33.
[11]Heisele B,Riskov I,Morgenstern C.Components for Object Detection and Identification[J].Springer Berlin,Heidelberg Germany,Ch.III,2006,4170:225 -237.
[12]Bileschi S M,Leung B,Rifkin R M.Towards Component Based Car Detection[C]//ECCV Workshop on Statistical Learning and Computer Vision,Prague,Czech Republic:Springer,2004:75 -98.
[13]Bernstein E J,Amit Y.Part- based Statistical Models for Object Classification and Detection[C]//Proceedings of Computer Vision and Pattern Recognition,2005,2:734 -740.
[14]Leibe B,Leolardis A,Schiele B.Combined Object Categorization and Segmentation with an Implicit Shape Model[C]//ECCV 04 Workshop on Statistical Learning in Computer Vision.Prague:Springer- Verlag,2004:17 -32.
[15]Rajajopalan A N,Burlina P,Chellappa R.Higher Order Statistical Learning for Vehicle Detection in Images[C]//International Conference on Computer Vision.Washington DC:IEEE Computer Society,Corfu,1999,2:1204 -1209.
[16]Schneiderman H,Kanande T.A Statistical Method for 3d Object Detection Applied to Faces and Cars[C]//Proceedings Conference on Computer Vision and Pattern Recognition.Hilton Head,SC:IEEE Computer Society,2000,1:746 -751.
Car Detection by Using High Resolution Remote Sensing Image Based on Background Iterative Search
WU Xiao - Bo1,2,YANG Liao1,SHEN Jin - Xiang1,2,WANG Jie1,2
(1.Remote Sensing and GIS Application Laboratory,Xinjiang Ecology and Geography Institute,Chinese Academy of Sciences,Urumqi 830011,China;2.Graduate University of Chinese Academy of Sciences,Beijing 100049,China)
In the traditional Space-to-Earth car detection system,thermal infrared,radar or aerial image data are often used,while high-resolution satellite remote sensing data have rarely been employed.To solve this problem,this paper proposes a new method for car detection based on high resolution satellite images,which is named BIS(Background Iterative Search).Firstly,according to the local differences between the object and the background,the background is searched and removed,and the preliminary car detection is achieved based on the material properties of cars.Secondly,the dynamic twin peak threshold method is used to separate roads from non - roads,and roads are roughly extracted based on shape features.Lastly,the correct car objects are obtained by constraining the elementary ones with the derived road information.The BIS method was applied with IKONOS and QuikBird data and proved to be effective.
High resolution satellite remote sensing;Car detection;Background iterative search
TP 751.1
A
1001-070X(2011)04-0046-06
2011-03-11;
2011-04-04
国家863项目(编号:2008AA121504)和国家科技支撑计划项目(编号:0914131)共同资助。
吴小波(1985-),男,硕士研究生,研究方向为遥感图像处理与信息提取。
杨 辽(1972-),男,教授级高级工程师,硕士生导师,研究方向为遥感与地理信息系统技术。联系电话:13609969033,邮箱:yangliao@ms.xjb.ac.cn。
(责任编辑:刘心季)
猜你喜欢
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
制造技术与机床(2019年9期)2019-09-10
成都信息工程大学学报(2019年5期)2019-05-21
西南交通大学学报(2018年6期)2018-12-18
小学生导刊(2018年34期)2018-12-18
山东青年(2016年3期)2016-02-28
探测与控制学报(2015年4期)2015-12-15
母子健康(2015年1期)2015-02-28
