多车辆—大跨连续梁桥耦合振动响应分析
2011-12-03 01:22:32蒋培文贺拴海宋一凡王凌波周勇军
郑州大学学报(工学版) 2011年5期
蒋培文,贺拴海,宋一凡,王凌波,周勇军
(长安大学公路学院,陕西西安710064)
0 引言
近年来,车桥的耦合振动研究已经成为热点,Kawatani等[1]采用3轴汽车模型研究了简支梁的非平稳随机振动;Marchesiello等[2]采用3轴汽车模型研究了多跨连续板桥的动力反应;王元丰等[3]将车与桥相互作用作为整体建立体系振动微分方程组,应用数值分析方法求解了公路简支梁、连续梁桥动力响应;沈火明[4-5]应用达朗伯原理建立简支梁桥车桥耦合振动分析模型,数值分析求解微分方程组;彭献[6]运用Newmark逐步积分法解得匀变速移动质量与简支梁耦合系统的响应;丁南宏[7]采用单个移动质量—弹簧—阻尼模型模拟车辆,应用达朗贝尔原理和位移协调条件,推导出车桥耦合振动的运动方程;王凌波等[8]利用车桥耦合振动原理结合车桥相关参数,提出一种简捷实用的桥梁刚度健康状态快速检测方法.
目前绝大多数对公路桥梁车桥耦合振动响应研究还仅限于单一车辆,并未考虑多车辆过桥的耦合振动响应,笔者将对该方面进行较为详细的研究.
1 车桥耦合振动分析方法
1.1 基于ANSYS的数值分析方法[9-10]
1.1.1 桥梁和车辆模型的建立
笔者将车辆模型与桥梁模型建立在同一个ANSYS工作环境下,各自独立,两者间耦合作用关系通过APDL编程语言计算并将其在任意时刻施加于车辆及桥梁结构.在ANSYS环境下,利用MASS21、COMBIN14、BEAM4 等单元对平面双轴车辆模型进行建模分析,见图1.
图1 中Mc为车体质量;Ic为车体质心绕z轴转动惯矩;Mi、Kdi和Cdi分别为第i个轮子的车辆质量参数、弹簧阻尼器的刚度及弹簧阻尼器的阻尼;b1、b2分别为质心至车辆后轴、前轴的距离;c1为车辆驾驶员处距前轴距离.
当N辆车以不同行驶参数作用于桥梁时,可在ANSYS环境下建立N个相互独立的车辆模型,以进行多车辆过桥时的耦合振动分析.
1.1.2 确定车辆各轮在任意时刻的坐标
桥面上车辆的行驶状态通常为匀速或匀变速状态,笔者采用车辆行驶起始节点P(Px,Py,Pz)与车辆行驶结束节点Q(Qx,Qy,Qz)来定义车辆的行驶方向,结合车辆的初始速度v0、车辆的加速度α、车辆的行驶时间t,即可确定车辆模型中各轮位置坐标:

式中:lc为车辆行驶起点与终点的距离;lc=+αt2/2或zjl=-v20/(2α),仅当 α <0且tα < -v0时;cij中i代表车轮编号,j代表坐标方向;其余参数含义见车辆模型示意图.
1.1.3 竖向荷载与挠度的转换
任意t时刻的车辆各轮坐标确定后,由于该坐标点未必处于桥梁节点处,故需进行车轮位置处与桥梁节点处竖向荷载与挠度的转换.
(1)车轮位置处的等效荷载转换如图2所示,梁单元等效荷载转换可通过式(2)所示梁单元的荷载等效原理[10]进行计算,转换结果见式(3).
马卜子村位于大佘太镇西部,全村村民以农业种植为主业,主要种植作物有玉米和葫芦。2017年,时任驻村书记的杨森同志带着几个来自华南农业大学作物营养与施肥研究室的技术人员来到村里,给农民们做水肥管理技术培训。“他们说要找几块示范田,对水肥管理进行全程的服务与跟踪,开展‘精准配肥’”,村民韩俊义告诉记者,“当时负责对接落实这项工作的是村委会干部刘玉。”

图2 梁单元的等效荷载转换示意Fig.2 Equivalent load of beam element

(2)车轮位置处的竖向位移转换如图3所示.纯弯梁单元的位移场(竖向挠度)根据文献[11]推导结果如下:

式中:v1,θ1,v2,θ2分别为梁单元两端节点的竖向位移与转角度,为截面位置系数.

图3 梁单元位移转化示意Fig.3 Displacement transformation of the beam element
此外,扭矩的荷载及转角同样可根据线性插值函数计算[10],不再赘述.
1.1.4 车桥耦合相互作用的数值计算方法
平面双轴车辆模型包含4个独立的自由度,分别为轮对处竖向位移z1、z2及支承车体点的竖向位移z'1、z'2.根据力的平衡原理,推得车辆的振动方程:
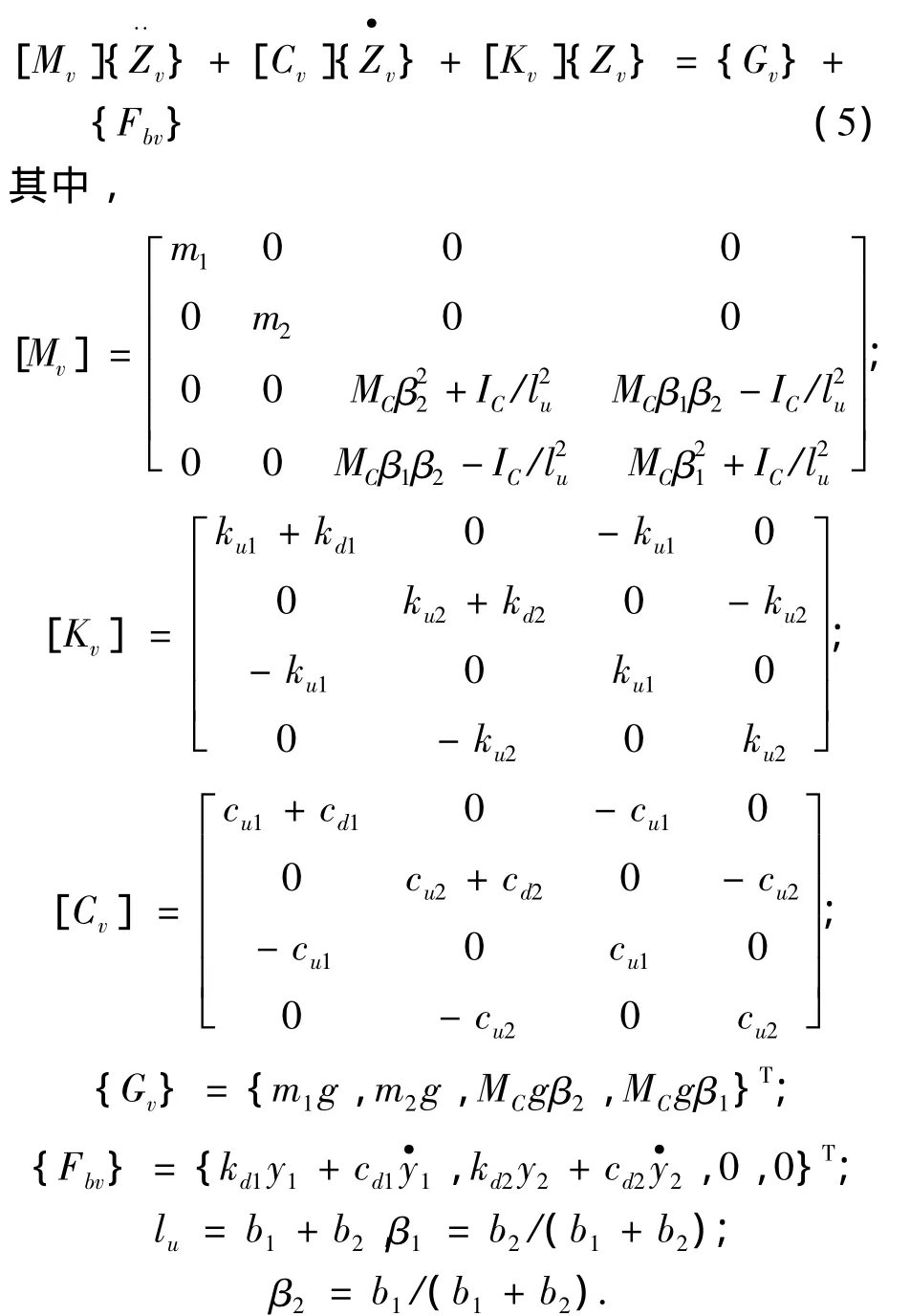
可以看出,[Mv]、[Cv]、[Kv]、{Gv}均为常量,只与车辆的初始参数有关,仅有{Fby}随时间及车辆位置变化.笔者将{Fby}通过APDL语言在车辆行驶过程中实时计算,将{Gv}+{Fbv}施加于车辆模型中各自由度所在节点进行时程分析.假定车轮下部与桥面在任意时刻紧密接触,通过式(6)可求解车辆在任意时刻与桥梁间的接触力F(t),从而计算车辆过桥的时程响应.式中:DC(t)、vC(t)为t时刻车轮节点的竖向位移速度;DQ(t)、vQ(t)为t时刻车轮正下方对应桥梁节点的竖向位移和速度;W为车轮所在处的路面不平整度数据;K为车轮与桥梁连接弹簧的刚度;C为车轮与桥梁连接弹簧的阻尼.

其中节点速度vC(t)、vQ(t)可通过数值微分相关理论进行计算[9].
1.2 匀速通过简支梁时的车桥耦合振动分析

图4 本文方法分析结果Fig.4 The results of the analysis method
2 多车辆—大跨连续梁耦合振动响应分析
2.1 桥梁模型
以一座较典型的变截面大跨连续梁桥为例,研究多车辆共同行驶时的车桥耦合振动响应,该桥挠度控制截面(Ⅰ、Ⅲ、Ⅴ)与弯矩控制截面(Ⅰ~Ⅴ)如图5所示.该桥梁参数见表1所示.
2.2 计算工况
研究表明,车桥耦合振动影响因素主要有[11]:车辆行驶方式、车辆行驶速度、车辆模型、桥面的平整度等.将各因素进行全排列,得到所有工况.
(1)车辆行驶方式:各车辆间隔1.8 s依次上桥,同向行驶,车辆数分别为 2,4,6,8 辆.
(2)车辆行驶速度:60,80,100,120 km/h.
(3)车辆模型分2种:①1/2车辆模型,车辆参数见表2所示;②集中力车辆简化模型,前轴66.15 kN,后轴129.85 kN,不考虑车辆对桥梁作用力的变化.
(4)路面不平整度:①完全平整,②B级路面.
2.3 车桥耦合振动响应分析结果
运用笔者方法对以上所有工况进行车桥耦合振动分析,得到各控制截面的挠度、弯矩时程响应曲线,进而推算各控制截面的挠度、弯矩冲击系数如下式,计算结果如表3所示.

式中:μ为冲击系数;ydmax、yjmax为在效应时间历程曲线上最大静力处量取的最大动、静效应值.
为了表示方便:挠度冲击系数“μD1/μD2/μD3”依次表示3个挠度控制截面冲击系数,单位10-2;弯矩冲击系数“μM1/μM2/μM3/μM4/μM5”依次表示5个弯矩控制截面的冲击系数,单位10-2).

图5 连续梁控制截面示意(单位:cm)Fig.5 Control section of continuous beam

表1 桥梁参数Tab.1 Bridge parameters

表2 车辆模型计算参数Tab.2 Analysis parameters of vehicle model

表3 各行驶工况下的桥梁控制截面挠度、弯矩冲击系数计算结果Tab.3 Impact coefficient of deflection and moment for all driving conditions ×10-2
2.4 结果分析
(1)同时作用于桥面的车辆数量对连续梁各个截面冲击系数有着明显的影响,且单孔跨度越大时,该影响越明显.桥梁各控制截面的挠度、弯矩冲击系数随着桥面车辆数量的增加,变化规律不明显,但总体看来,平整路面时,较少的车辆容易对各个控制截面产生较大的挠度、弯矩冲击系数;当路面平整度状况较差时,则反之.
(2)随着车辆行驶速度的提高,控制截面的挠度、弯矩冲击系数并不单调增加,但根据计算结果,高速行驶工况下产生高冲击系数的概率较大,对桥梁的安全性较为不利.
(3)路面不平整度对控制截面的挠度、弯矩冲击系数影响很大,随着路面不平整度的提升,控制截面的挠度、弯矩冲击系数延非线性趋势上升.
(4)桥梁简化动力计算中通常采用的集中力模型的计算结果中,控制截面的挠度、弯矩冲击系数与平整路面下1/2车辆模型计算结果相比略大;与B级路面下1/2车辆模型计算结果相比略小.由此可见,由于集中力模型无法考虑路面不平整度对桥梁振动响应的影响,故当桥面平整度状况较好(完全平整或A级)时,可偏保守的按照简化集中力模型计算;但当桥面平整度状况较差(B级或低于B级时),将车辆简化为集中力模型进行计算则对安全性不利,此时宜采用1/2车辆模型对全桥进行车桥耦合动力分析.
3 结论
针对公路桥梁在多车辆行驶、匀变速行驶等复杂工况下的车桥耦合振动响应问题,笔者基于大型有限元软件ANSYS单一平台,将车辆与桥梁分别建模,其耦合关系利用APDL语言及其强大的结构动力分析模块进行求解.该方法可适用于各种结构体系公路桥梁的车桥耦合振动问题,无需借助MATLAB软件或自编程序即可计算任意截面挠度、弯矩、速度、加速度等参数的时程响应曲线及相应的冲击系数.运用笔者方法对1/2车辆模型匀速通过简支梁工况进行了分析求解,与参考文献的结果对比表明,笔者方法可行并具有良好的精度.
利用笔者方法,对多车辆同时作用于大跨径连续梁时的车桥耦合振动响应进行了详细的分析,计算中考虑不同行驶工况、不同车辆模型、不同行驶速度、不同路面平整度等级等参数,得到所有工况控制截面的时程响应曲线并计算冲击系数.结果表明:单孔跨度越大时,多车辆耦合振动效应越明显;高速行驶工况下产生高冲击系数的概率较大;路面平整度等级下降会使冲击系数延非线性增加;当桥面平整度状况较好时,可偏保守的按照集中力车辆模型计算,否则不宜采用.
[1] KAWATANI M,KOBAYASHI Y,TAKAMORI K.Non-stationary random analysis with coupling vibration of bending and torsion of simple girder-bridge under moving vehicle [J].Structural Engineering Earthquake Engineering JSCE,1998,15(1):107-114.
[2] MARCHESIELLO S,FASANA A,GARIBALDI L,et al.Dynamic of multi-span continuous straight bridges subject to multi-degrees of freedom moving vehicle excitation[J].Journal of Sound and Vibration,1999,224(3):541-561.
[3] 王元丰,许士杰.桥梁在车辆作用下空间动力响应的研究[J].中国公路学报,2000,13(4):38-41.
[4] 肖新标,沈火明.移动荷载作用下桥梁的系统仿真[J].振动与冲击,2005,24(1):121-123.
[5] 沈火明,肖新标.求解车桥耦合振动问题的一种数值方法[J].西南交通大学学报,2003,38(6):658-662.
[6] 彭献,殷新锋,方志.变速车辆与桥梁的耦合振动及其TMD控制[J].湖南大学学报:自然科学版,2006,26(5):19-21.
[7] 丁南宏,林丽霞,钱永久,等.双链式悬索桥车桥耦合振动研究[J].兰州交通大学学报,2010,29(1):95-99.
[8] 王凌波,贺拴海.基于车桥耦合振动的桥梁检测方法研究[J]. 郑州大学学报:工学版,2011,32(1),26-29.
[9] 张雄,王天舒.计算动力学[M].北京:清华大学出版社,2007.
[10]曾攀.有限元分析及应用[M].北京:清华大学出版社,2006.
[11]陈榕峰.公路桥梁车桥耦合主要影响因素仿真分析方法研究[D].西安:长安大学公路学院,2007.
猜你喜欢
华人时刊(2022年17期)2022-02-15 03:07:58
World Journal of Clinical Cases(2020年16期)2020-09-16 13:35:08
建材发展导向(2019年11期)2019-08-24 06:36:06
建材发展导向(2019年10期)2019-08-24 06:25:40
江西建材(2018年1期)2018-04-04 05:26:16
中国铁道科学(2015年1期)2015-06-26 08:33:46
建筑材料学报(2015年3期)2015-02-28 02:36:36
吉林地质(2014年4期)2014-03-11 16:47:56
河南科技(2014年8期)2014-02-27 14:08:04
城市道桥与防洪(2014年4期)2014-02-27 07:25:51