水电站GPS变形监测网的数据处理及稳定性分析
2011-11-15 03:22:36周命端郭际明许映林李玉平
测绘通报 2011年7期
周命端,郭际明,许映林,李玉平,李 琛
(1.武汉大学测绘学院,湖北武汉430079;2.新疆水利水电勘测设计研究院测绘工程院,新疆昌吉831100;3.湖南省东安电力公司,湖南永州425900)
水电站GPS变形监测网的数据处理及稳定性分析
周命端1,郭际明1,许映林2,李玉平2,李 琛3
(1.武汉大学测绘学院,湖北武汉430079;2.新疆水利水电勘测设计研究院测绘工程院,新疆昌吉831100;3.湖南省东安电力公司,湖南永州425900)
以2009年观测数据为例,应用GAMIT软件和CosaGPS软件对山口水电站GPS变形监测A级网的数据进行处理。探讨高精度GPS网数据处理的方法和过程,比较研究两期观测成果,分析GPS变形监测网基准点的稳定性,为山口水电站GPS变形监测提供参考。
GPS网;变形监测;稳定性分析;数据处理
山口水电站工程是新疆某河干流梯级开发的最末一级,规模属于大二型。该工程由拦河坝、泄水建筑物、发电引水系统及电站厂房等主要建筑物组成,大坝高51 m,水库总库容1.21×108m3,装机容量140 MW。为保证水电站大坝的安全,需要对该大坝进行形变监测。由于水电站地处山区,地势险要,受地理环境、天气及地形比较复杂条件等因素的影响,采用常规测量手段难以实现。而GPS定位技术作为一种全新的测量手段,在水利水电工程各阶段测量中已逐步得到使用[1]。它以高精度定位、全天候作业、高效率观测、多功能、操作简便、应用广泛等优点备受青睐。为此,用GPS定位技术建立了山口水电站变形监测基准网。该GPS网共布设了7个基准点,如图1所示。GPS变形监测网的外业观测与数据采集使用了4台美国天宝公司的Trimble 5700双频GPS接收机进行同步观测,采用基于24 h的连续观测方式,白天、晚上所占时间均匀分布,可以达到最佳效果。全网于2008年11月2—8日进行了第一期观测,共4个时段,于2009年11月11—19日进行了第二期观测,共4个时段,每个基准点平均累计观测时间均达到54 h以上,达到A级网测量规范规定的观测时间要求。
本文以2009年观测数据为例,应用高精度GAMIT软件和CosaGPS软件对山口水电站变形监测A级GPS网的数据进行处理,将数据处理成果与第一期数据成果作比较研究,进而对A级GPS基准点作稳定性分析。
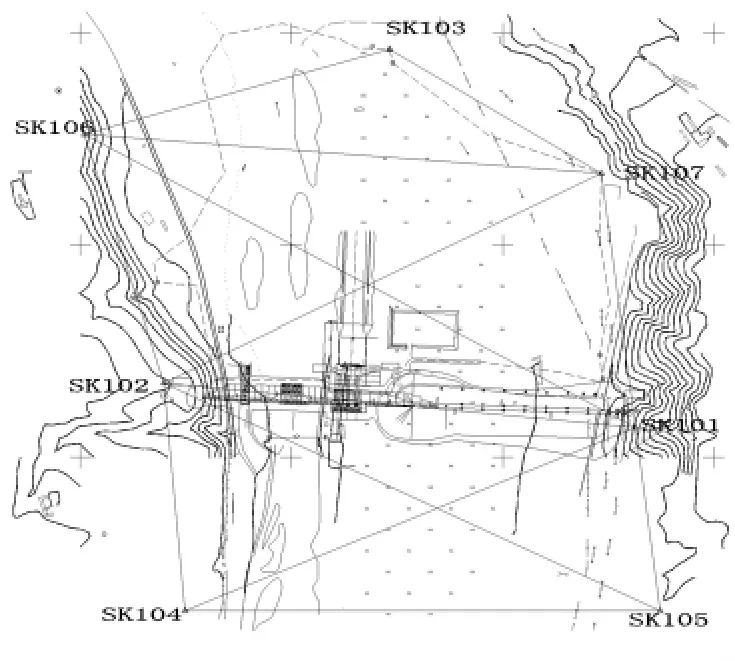
图1 水电站GPS变形监测网
一、GPS基线处理与分析
为了保证GPS变形监测网的高精度,基线处理采用GAMIT软件,版本为10.35,在基于Ubuntu操作系统的PC机上完成数据处理。GAMIT软件是由美国麻省理工学院(MIT)和斯克里普斯海洋研究所(SIO)联合研发的一套高精度GPS数据分析软件,可应用于高精度GPS测量数据处理[2]。
应用GAMIT软件进行基线处理时,地面参考基准站的选择及其坐标精度将影响到基线解算结果[3]。为了获得高精度GPS基线解算结果,同时为了将变形监测成果统一到国际地球参考框架基准ITRF下,采用国际IGS全球卫星跟踪站作为基线解算的地面基准站。根据IGS站的分布与测区GPS站的分布情况,同时顾及IGS站坐标的精度和数据质量,最终选择URUM(乌鲁木齐站)和GAUO(南山站)两个全球卫星跟踪站作为基准站,根据SOPAC官方网站提供的站坐标成果,其地心坐标分量精度为±(3~8)mm。采用URUM和GAUO联合基准点SK101构成基准坐标传递网以获得GPS变形监测网的起算坐标。
GAMIT基线处理策略采用固定轨道(Choice of Experiment=BASELINE),估算对流层折射参数,且2 h估算一次(Zenith Delay Estimation=Y和Interval zen=2),其他的设置采用GAMIT默认模式,基线精处理采用国际上最为精确的IGS综合精密星历。对于基准坐标传递网的基线解算,采用消电离层组合模型(Choice of Observable=LC_HELP),双频观测值组合观测量为[2]

而对于GPS形变监测网的基线解算,采用无电离层约束的组合模型(选择Choice of Observable=L1,L2_INDENPEND),双频观测量为

为使两期基线解算结果具有可比性,GPS变形监测网第二期数据处理策略应与第一期解算策略保持一致。GAMIT基线解算水平方向分量与垂直方向分量的精度统计如图2所示。从图2可以看出,第二期基线解算的精度在水平分量上为±(0.5~0.7)mm,在垂直分量上为±(1.3~2.2)mm。
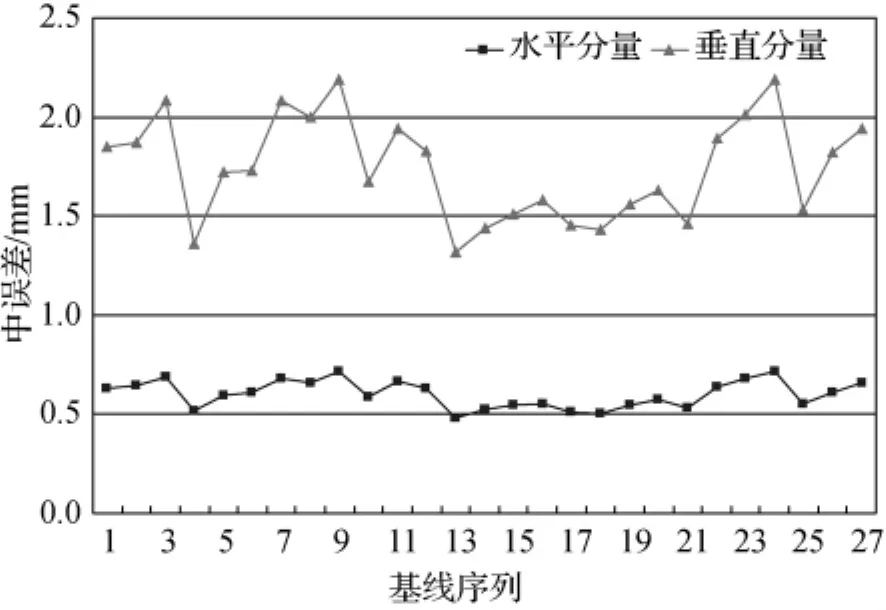
图2 第二期基线处理精度统计
为比较研究两期基线解算的精度差异,将第一期GAMIT基线解算的精度作统计分析,如图3所示。从图3可以看出,第一期基线解算的精度在水平分量上优于±0.7 mm;垂直分量上优于±1.0 mm。比较图2与图3,可以看出第一期基线解算的精度略优于第二期,但为同一数量级,这表明两期基线解算的精度是相当的。
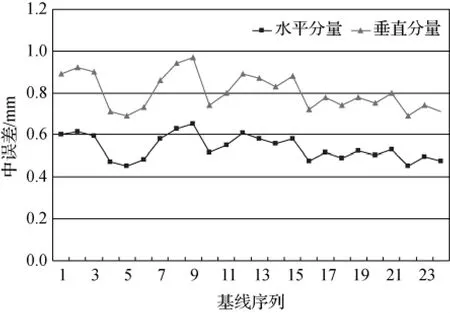
图3 第一期基线处理精度统计
二、GPS网平差处理与分析
网平差采用武汉大学测绘学院研发的CosaGPS软件,版本为V5.13。应用CosaGPS软件提取GAMIT软件处理的基线向量解信息,包括基线向量解及其方差-协方差阵,作为GPS网平差处理的观测量。
1.粗差分析
粗差分析是指对观测量中可能存在的粗差,通过有效的方法进行检验和探测,并采用适当的处理方法消除粗差对平差结果的影响。GPS网平差处理采用的观测量来源于GAMIT软件基线处理获得的三维基线向量解及其方差-协方差阵。而GAMIT解算基线是采用全组合基线处理模型,这使得基线向量解各分量之间不但存在着相关性,而且同步环各基线向量解之间也存在着相关性。基于相关分析的粗差探测方法,考虑了观测量之间随机特性相关性,适合于高精度GPS网的粗差分析,所以,可采用基于相关分析的粗差理论来探测及消除其影响[4-5]。在GPS网平差系统中对验后单位权方差进行χ2检验。由于的理论值等于1,则有χ2检验量为

选取置信水平1-α,α=0.005,若

成立,则接受H0;否则,则拒绝H0,认为平差系统中可能存在粗差。
2.改造方差-协方差阵
对于判定为粗差的观测量,调整其参加平差的权,粗差观测量i的选权因子由平差值改正数的大小vi及其精度σvi确定,即

为保持观测量之间的相关系数不变,而与粗差有关的协方差改正为

观测量经过粗差分析,探测和消除粗差的影响后,三维无约束平差结果的验后单位权方差通过χ2检验,但是。这是因为GAMIT基线解输出精度偏高,与实际测量精度不匹配[6]。这时,可以对基线向量解的方差-协方差阵进行改造,可根据外业测量时使用的GPS接收机的标称精度来确定GPS网基线测量中误差[7]。
3.检验与精度评估
GPS三维无约束平差的结果,客观地反映了整个GPS网观测量的内部符合精度。观测量的改正数vi及改正数的精度σvi,反映了观测量成果的好坏。当vi<3σvi,认为观测量与其平差时赋予的先验精度相匹配。三维无约束平差基线向量X、Y、Z方向改正数及限差如图4所示。从图4可以看出,所有基线向量在X分量的改正数在-1.3~1.3 mm内,Y分量在-3.0~2.9 mm内,Z分量在-2.5~2.5 mm范围内;基线向量三分量改正数的大小远小于限差值(15.0 mm),三维基线向量平差精度良好。

图4 基线三维分量改正数及限差
以SK101为起算点,其三维直角坐标值的获得是通过联合IGS跟踪站GUAO和URUM进行高精度数据处理传递得到的,参考框架为ITRF2000,历元为2008.840,其三维坐标为:X=…244.132 5,Y=…932.278 1,Z=…005.112 6,水平分量中误差为±2.8 mm,垂直分量中误差为±8.9 mm,点位精度为±9.3 mm。三维无约束平差基准点坐标成果精度分析如图5所示。从图5可以看出,GPS变形监测网中基准点的坐标平差值水平分量优于1.0 mm,高程分量优于 2.5 mm,点位精度优于±3.0 mm。
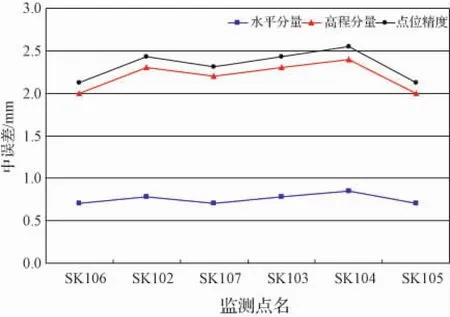
图5 基准点平差坐标精度分析
三、A级基准点稳定性分析
1.平差基准选取与框架统一
在水电站GPS变形监测网两期的数据处理中,应用GAMIT软件解算基线时采用相同的基线处理策略;应用CosaGPS软件进行网平差处理时,三维无约束网平差固定SK101基准点(该点两期稳定),作为网平差处理的起算基准,SK101基准点的坐标采用参考框架为ITRF2000,历元为第一期观测的平均瞬时历元,即2008.840,其三维直角坐标值的获得是通过联合IGS跟踪站GUAO和URUM进行高精度数据处理传递得到的。二维平差以第一期已知成果中给出的SK101为已知点,SK101到SK102的方位角(…5°…3'…9.59″)作为已知方位角,在工程坐标系(WGS-84椭球,高斯正形投影,中央子午线为…2°…9'…5″,投影面高程为正常高…00 m),进行“固定一点一方向”平差。因此,水电站GPS变形监测网两期数据处理的所选取的基准和所采用的参考框架及历元是一致的,这为A级基准点的稳定性分析提供了统一的基准和框架及历元,两期观测成果具有可比性。
2.点位稳定性分析
利用独立基线向量观测量进行GPS三维向量网平差和“固定一点一方向”平差处理,得到GPS变形监测网其他基准点的三维空间直角坐标和二维平差坐标。为分析基准点稳定性情况,将本期数据处理得到的7个基准点的三维坐标及平面坐标和大地高与第一期数据处理成果进行求差并作比较分析,其较差(第一期减第二期)结果如表1所示。
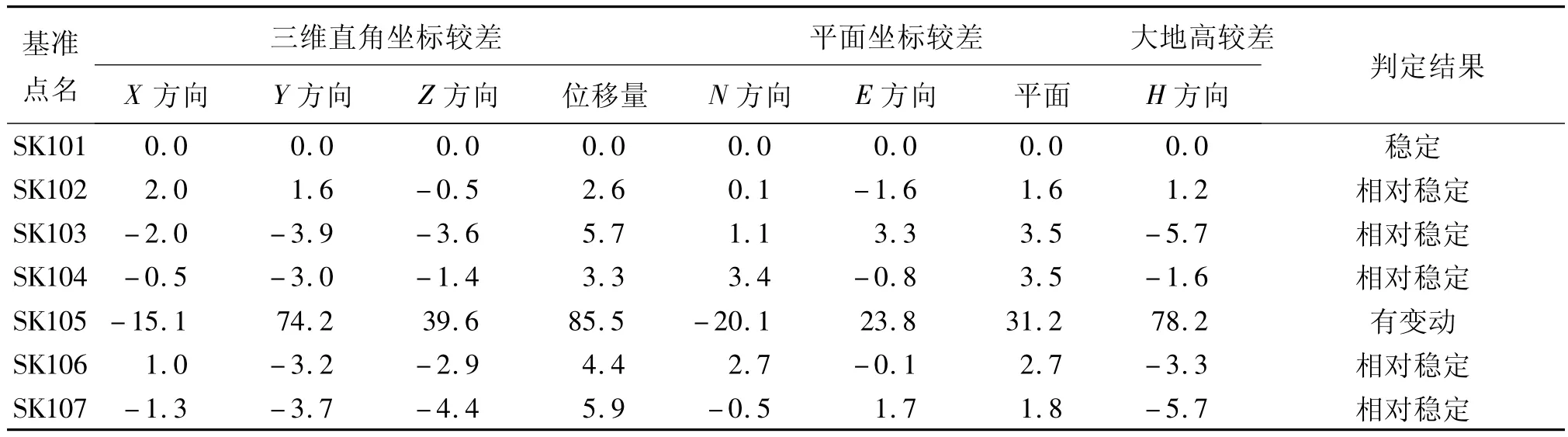
表1 GPS变形监测网两期点位坐标较差值 mm
从表1可以看出,对两期观测结果的点位坐标较差比较分析,基准点 SK102、SK103、SK104、SK106、SK107在WGS-84坐标系中X分量、Y分量及Z分量较差都在4.5 mm以下,位移量在5.9 mm之内,大地高较差值都在5.8 mm以下;在工程独立坐标系中N方向、E方向分量都在3.5 mm以下,点位平面坐标较差值在1.6~3.5 mm,若以两倍点位中误差(σ≤5 mm)作为两期观测结果较差值的限差,则在测量误差允许的范围内,可以判定这5个基准点保持相对稳定。而基准点SK105的三维直角坐标较差在 X方向有15.1 mm变化,Y方向有74.2 mm的变化,Z方向有39.6 mm的变化,点位位置移动量为85.5 mm,大地高H方向有78.2 mm变化;在工程独立坐标系下的平差坐标较差值在N方向有20.1 mm变化,E方向有23.8 mm变化,点位平面坐标有31.2 mm变化,若以两倍点位中误差(σ≤5 mm)作为两期观测结果较差值的限差,则在测量误差允许的范围内,可以判定基准点SK105点有变动,需要进行原因分析。
四、结束语
应用GAMIT软件进行基线解算,并采用IGS综合精密星历和ITRF框架下的精确坐标作为基线解算基准,确保了GPS变形监测网在ITRF框架下取得高精度成果。应用CosaGPS软件进行网平差处理,观测量通过粗差分析、方差-协方差阵的改造,使GPS网具有很高的内部符合精度。统一坐标基准和参考框架及历元,获得高精度ITRF2000框架、参考历元为2008.840下的最终平差结果及工程坐标系下的平面坐标,比较分析两期观测成果,对A级GPS变形监测网基准点进行了稳定性分析,结果表明,基准点SK105有变动,而其他基准点保持相对稳定,这为山口水电站的变形监测分析提供参考和借鉴。
[1] 田雪冬,郭际明,郭麒麟,等.GNSS定位技术在水利水电工程中的应用[M].武汉:长江出版社,2009.
[2] HERRING T A,KING R W,MCCLUSKY S C.GAMIT Reference Manual Release 10.35[EB/OL].[2009-06-01].http:∥chandler.mit.edu/~simon/gtgk/GAMIT_ Ref_10.35.pdf.
[3] 隋立芬.高精度GPS网的统一与数据处理若干问题研究[D].郑州:信息工程大学,2001.
[4] 施闯,刘经南.基于相关分析的粗差理论[J].武汉测绘科技大学学报,1998,23(1):5-9.
[5] 施闯,刘经南.国家高精度GPS整体平差中的粗差分析[J].武汉测绘科技大学学报,1999,24(3):107-111.
[6] 齐国良,施闯,姚宜斌.陕京输气管道断裂带形变监测GPS网的数据处理及形变分析[J].测绘信息与工程,2004,29(5):36-39.
[7] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 18314—2009全球定位系统(GPS)测量规范[S].北京:中国标准出版社,2009.
Data Processing and Stability Analysis of GPS Deformation Monitoring Network for Hydropower Station
ZHOU Mingduan,GUO Jiming,XU Yinglin,LI Yuping,LI Chen
0494-0911(2011)07-0030-04
P228.4
B
2010-9-29
周命端(1985—),男,湖南东安人,博士生,主要从事高精度GNSS定位技术及其应用研究工作。
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
现代测绘(2021年1期)2021-04-28 10:19:56
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
数字通信世界(2015年10期)2015-12-21 12:22:54
山东冶金(2015年5期)2015-12-10 03:27:41
导航定位学报(2015年2期)2015-06-05 09:27:41
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:09
中国质量与标准导报(2013年8期)2013-03-11 19:54:11