利用高程二次定向提高无人机航测高程精度的探讨
2011-11-15 03:22:36吴巧玲董祥林
测绘通报 2011年7期
吴巧玲,董祥林,高 宇
(1.福建省测绘院,福建福州350003;2.淮北矿业集团公司,安徽淮北234115; 3.武汉海地测绘科技有限公司,湖北武汉430074)
利用高程二次定向提高无人机航测高程精度的探讨
吴巧玲1,董祥林2,高 宇3
(1.福建省测绘院,福建福州350003;2.淮北矿业集团公司,安徽淮北234115; 3.武汉海地测绘科技有限公司,湖北武汉430074)
分析航摄像片倾角过大对航测成果的误差影响及影响程度,并结合实际试验和应用,发现采用高程二次定向,可以有效地控制高程误差,从而使最终的航测成果满足航测规范的精度要求。
高程误差;像片倾角;精度
一、引 言
随着无人机航空摄影在测绘行业的推广和应用,其测量高程精度的控制问题也逐渐成为业界关注的重点。由于无人机体积小、重量轻,在空中飞行姿态容易受到气流的影响,往往造成航摄像片倾角过大。笔者在多次无人机项目生产实践中,通过对不同姿态角航摄立体像对和近似理想立体像对的航测高程分析比较,并统计其误差,发现航摄像片倾角过大,对高程误差的影响较大,需要采取其他方式,方可实现将高程误差控制在规范要求的限差范围内。
二、误差来源分析
目前,受无人机航高等因素制约,测绘行业通常利用无人机航摄影像测制丘陵或山地地形1∶1 000、1∶2 000比例尺的数字地形图。依据我国航空摄影测量的技术规范,除特殊困难区域外,要求其内业加密点及高程注记点的高程中误差不大于表1所示的规定。
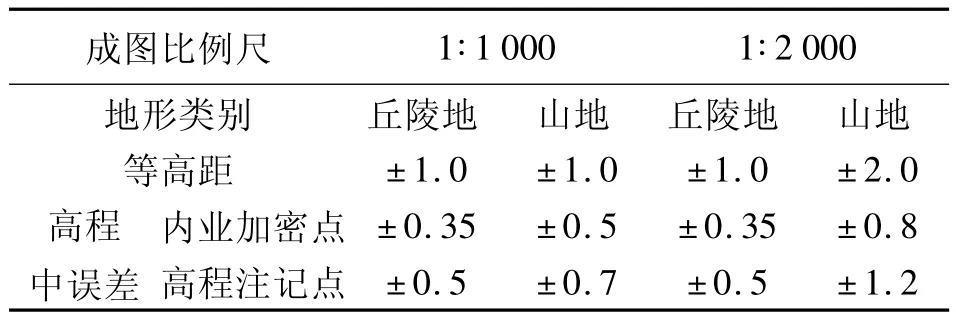
表1 m
摄影测量是建立在竖直摄影基础之上的,即摄影机主光轴垂直于地面。因此,为了保证摄影测量的立体量测地形图数据的数学精度,测绘航空摄影规范对测绘航空摄影光轴倾角均有限制。理论上理想立体像对高差公式为[1]

式中,Δp为同名地物左右视差较。
而对于因气流影响使得影像含有像片倾角的竖直摄影立体像对来说,如果仅以一次项的精度去要求,则应考虑加入左右视差的一次项改正数[1]
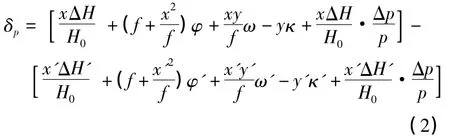
这样,就把含有像片倾角的Δp改化为理想像对下的Δp。如果未进行一次项改正数的改化,将会使立体模型在高程方面产生变形,即高程扭曲,这一扭曲将在实际生产中影响地形图的高程精度。
由δΔp引起的高程误差为
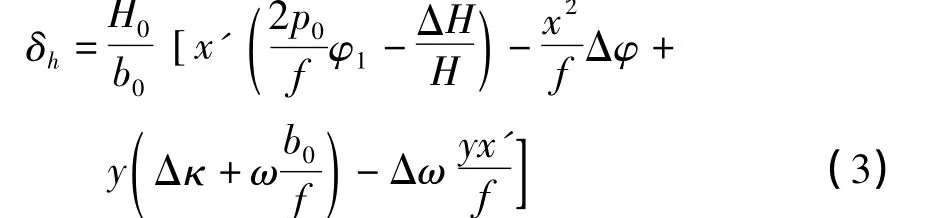
当像对的外方位元素为已知时,式(3)中的像点坐标为变数,则可以将高程扭曲公式表达为

式中,a0、a1、a2、a3、a4为常数系数。
从式(4)可知,由于像片倾角引起的高程误差曲面为一个双曲线的抛物面,这一误差将直接影响立体模型高程量测精度。
在无人机测绘航空摄影中,发生像片倾角超限的可能性要大于常规测绘航空摄影。现有的数据生产流程,首先是通过空中三角测量获取每张像片的6个外方位元素,然后在数字摄影测量工作站上恢复立体模型进行地形图测制。在这种作业模式下,通常像片倾角超限的立体模型其高程量测误差远远超过相应比例尺的航测规范要求。
三、不同像片倾角立体量测高程精度分析
对于像片倾角过大引起立体模型超限的问题,笔者在武夷山、松滋核电规划区等1∶1 000无人机航空摄影测量项目中,对不同像片倾角立体模型采集的航测高程精度进行统计。这两个测区均属于丘陵地形,设计航高500 m,相机焦距为45.8 mm,地面实际分辨率为8 cm。具体统计数据如表2所示。
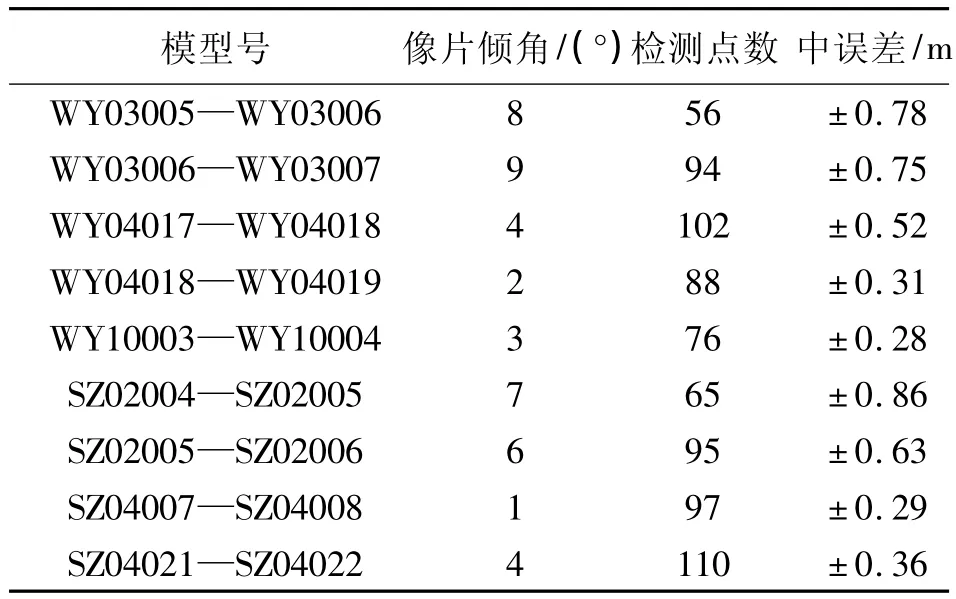
表2 不同倾角立体模型高程量测精度误差统计
以上统计数据是采用PATB进行光束法平差以后,直接在数字摄影测量工作站恢复立体模型后采集的高程点与野外实测高程点进行对比、统计获取的中误差。从表2数据可以得出以下规律。
1)航测内业测量的高程中误差随着像片倾角的增大而增大。
2)当像片倾角小于3°时,高程精度可以满足规范的要求。
四、提高高程精度方法的探讨
通过项目实际生产的统计可以得出:在无人机航空摄影测量的过程中,由于无人机的姿态影响,对航测成果高程精度影响较大,较好的像片倾角可以获取满足国家技术规范要求的高程精度;像片倾角过大将直接导致航测高程精度超限。而利用无人机航空摄影测绘时,必然存在部分模型像片倾角超限,也就是说,每一测区必然有一定数量的立体模型航测内业数据的高程中误差超限。如何解决这一问题是本文讨论的重点。笔者在利用无人机航空摄影测量项目中,针对像片倾角超限的模型,通过采取以下技术手段来提高立体模型的高程量测精度。
实际上,在利用空三获取的外方位元素恢复立体模型后,在对像片倾角过大的立体模型绝对定向的过程中,笔者发现尽管绝对定向误差的残差很小,但全野外测量的高程控制点仍不能准确地恢复到被量测地物的表面。通过以上分析,认为这是由于像片倾角超限,造成利用PATB光束法平差反算以后该类像片的外方位元素中3个角元素不正确所引起的。
松滋核电规划区采用高程控制全野外布设方案,对于像片倾角超限的立体像对,笔者采取以下方案:
1)利用空中三角测量进行加密平差,反算出野外高程控制点的平面坐标。
2)在数字摄影测量工作站上恢复立体模型。
3)删除加密过程的模型连接点,保留全野外测量的像片控制点。
4)保留野外测量的全部像片控制点(包括平高控制点和高程控制点),在立体状态下,重新观测野外控制点的高程。
5)重新绝对定向,计算倾角超限的像片6个外方位元素。
6)采集核线,立体采集。
以上方法,称为高程二次定向,即重新建立立体模型,进行数据采集,并可以将该超限立体模型的高程中误差控制在1/3等高距以内。
下面是倾角超限立体模型SZ02004-SZ02005通过空三平差后直接恢复模型的绝对定向结果,报告截取如下:
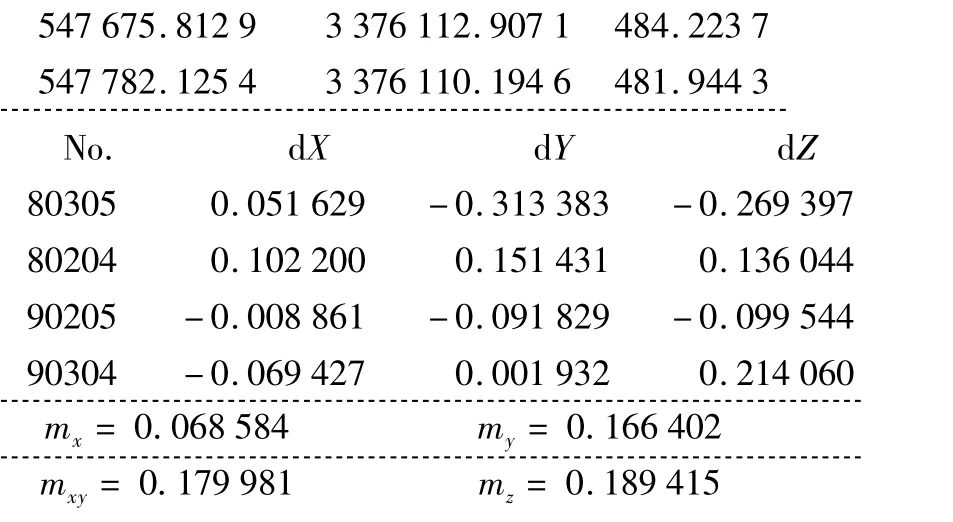
单纯从上面数据看,高程误差满足规范要求,但实际高程值是错误的。下面是利用该模型的两个平高控制和两个高程控制(其平面坐标为加密坐标)重新进行高程二次定向后的结果,报告截取如下:

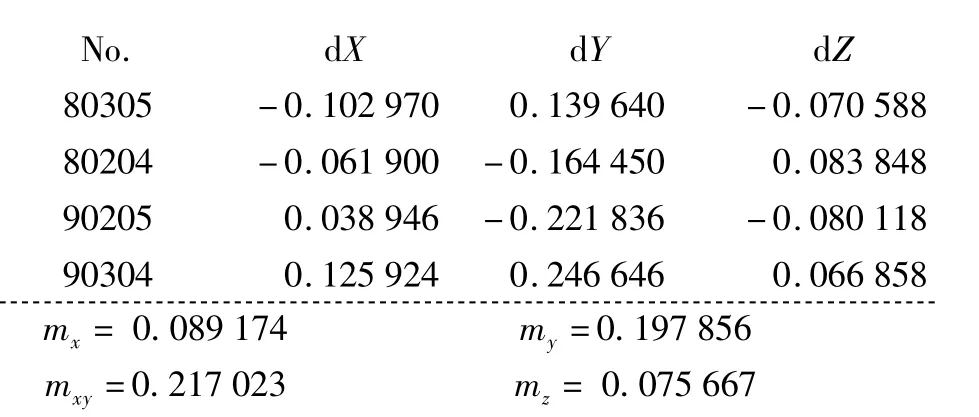
分析上述二次定向结果,通过高程二次定向,对模型外方位元素的线元素Xs和Ys的影响很小,但对Zs的影响约在0.4 m。同时,由外方位元素中3个角元素组成的旋转矩阵的数值变化也较大,即3个角元素的计算值也发生了变化。
笔者利用高程二次定向的模型,重新采集该模型高程,并统计出其高程中误差为±0.31 m,可以满足该项目设计要求。同样对其他像片倾角较大的立体模型均采用了高程二次定向,并进行中误差统计,其结果均能满足规范的要求。
五、结束语
通过以上两个测区的试验,笔者发现采用高程二次定向,可以提高利用较大倾角航摄像对测量成果的高程精度,确保最终成果满足1∶1 000或更小比例尺的航测规范要求。由于RTK的广泛应用,以及FJCORS的日益完善,全野外布设高程控制点变得十分简单。在今年的多个无人机航摄的项目中,运用该经验后,航测成果精度均满足设计要求。该方法也适用于常规航摄时个别像对倾角超限的情况。
[1] 黄世德.航空摄影测量学[M].北京:测绘出版社,1986.
[2] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2009.
[3] 乔瑞亭,孙和利,李欣.摄影与空中摄影学[M].武汉:武汉大学出版社,2008.
[4] 国家测绘局.GB/T 6962—2005 1∶500 1∶1 000 1∶2 000地形图航空摄影规范[S].北京:标准出版社,2005.
[5] 国家测绘局.GB/T 7930—2008 1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范[S].北京:标准出版社,2008.
Discussion of UVA Precision Improvement by Elevation Re-orientation
WU Qiaoling,DONG Xianglin,GAO Yu
0494-0911(2011)07-0012-03
P231
B
2011-01-21
吴巧玲(1970—),女,福建福州人,高级工程师,主要从事航测及遥感数据处理等工作。
猜你喜欢
科学大众(2021年19期)2021-10-14 08:33:10
中国临床医学影像杂志(2021年6期)2021-08-14 02:21:46
北京汽车(2021年3期)2021-07-17 08:25:42
航空知识(2019年1期)2019-01-11 01:34:48
现代测绘(2018年3期)2018-09-13 09:34:46
环球飞行(2018年7期)2018-06-27 07:25:52
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
中国房地产业(2016年9期)2016-03-01 01:26:46
中国非金属矿工业导刊(2015年5期)2015-12-22 06:26:14