
一种基于TD-SCDMA系统的定位算法研究
2011-11-15 03:22雒明世魏二虎
测绘通报 2011年7期
雒明世,魏二虎,高 林
(1.西安石油大学计算机学院,陕西西安710065;2.武汉大学测绘学院,湖北武汉430079; 3.大唐移动通信设备有限公司,陕西西安710061)
一种基于TD-SCDMA系统的定位算法研究
雒明世1,魏二虎2,高 林3
(1.西安石油大学计算机学院,陕西西安710065;2.武汉大学测绘学院,湖北武汉430079; 3.大唐移动通信设备有限公司,陕西西安710061)
对第三代移动通信TD-SCDMA系统设备定位技术的应用进行深入研究。在原有小区定位的基础上,提出一种新型的适用于TD-SCDMA系统的增强型定位算法,将可观察的到达时间差(OTDOA)与单基站智能天线定位技术相结合,通过减少测量的误差值来提高定位精度。主要阐述增强型算法的可行性,同时推导出OTDOA增强型算法的计算公式。
无线网络控制器;定位算法;OTDOA
一、引 言
定位技术是指依托于通信网络系统,利用定位技术确定移动终端的位置,并据此提供各种基于位置的应用增值业务。基于定位技术的增值业务能为通信网络运营商带来可观的增值效益,因此被各设备提供商和运营商广为关注。第三代(the 3rd generation,3G)移动通信中网络与移动定位业务之间存在着一种相辅相成的关系,而3G网络的最大优势是可以提供高速的无线数据下载功能,这就为移动定位业务提供了更加广泛的发挥空间。
时分同步码分多址(time division-synchronous code division multiple access,TD-SCDMA)作为中国电信行业近百年来第一个完整的通信技术标准,集码分多址(code division multiple access,CDMA)、时分多址(time division multiple access,TDMA)、频分多址(frequency division multiple access,FDMA)技术于一体,系统容量大,频谱利用率高,抗干扰能力强。同时利用时分双工方式,采用了智能天线、联合检测、接力切换、同步CDMA、低码片速率、多时隙、可变扩频系统、自适应功率调整、不对称时隙分配等一系列独特的技术。2009年TD-SCDMA正式投入商业应用,在中国移动的大力推动下,已经取得了可喜的成绩,2010年中国移动通信将会加快速度继续扩大TD-SCDMA商用网络的建设。
鉴于TD-SCDMA的发展前景,结合TD-SCDMA的技术优势,使得该系统的定位技术具有一定的优势。本文在此基础上,提出了一种新型的增强型定位算法,并推导出了具体的定位计算公式。
二、定位算法设计
TD-SCDMA系统中基本的定位方法是采用单基站智能天线定位,本文同时还考虑了标准推荐的OTDOA(observed time difference of arrival)定位方法,并在这两种算法的基础上提出了将智能天线定位和OTDOA定位相结合的新的增强型OTDOA定位算法。
1.基本定位算法
基本定位算法主要是指单基站智能天线定位方法。
TD-SCDMA系统使用了智能天线,所以可以利用智能天线技术和UE/NodeB辅助测量的定时信息,根据信号到达角定位AOA和时间提前量Tadv来实现单基站的移动定位业务。在终端侧将测量到的时间提前量Tadv放在测量报告中上报给网络侧,而基站则使用智能天线根据信号到达角AOA来确定来波方向,基站自身也测量 Tadv的偏差即RxTD,同时将AOA和RxTD上报给RNC。在RNC侧的定位模块负责位置信息的计算和转换。根据在操作维护设置的基站经纬度和上述的测量值,RNC就可以确定用户终端的位置信息。
假定终端(user equipment,UE)的待估计位置坐标为(x,y),服务基站发射机的已知位置坐标为(x1,y1),终端相对于服务基站的角度和时延分别为φ1和τ1,则可以得到终端的坐标估计为
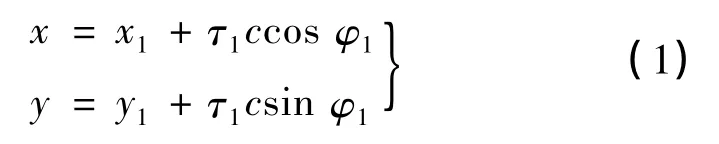
在具体实现时因考虑基站高度等信息,计算过程会略复杂些,但相应理论推算结果的准确性也会有所提高。
2.OTDOA定位算法
从减少计算量和终端高度对定位精确度结果影响较少等因素考虑,定位计算过程中暂不引入终端高度量。终端的待估计位置坐标为(x,y),最少需要接收3个基站信号,第i个基站发射机的已知位置坐标为(xi,yi)(i=1,2,3),终端观测的时延差分别为τ1,2、τ1,3和τ2,3
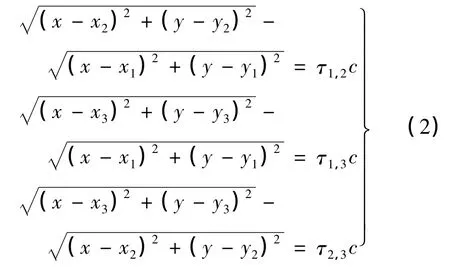
通过解式(2)的双曲线方程,可以得到(x,y)的估计值。如果终端测量正确,且没有多径干扰的影响,那么式(2)的3个方程中存在一个冗余的方程,也就是说3个方程是两个不相关方程。实际测量中,由于存在多径、测量精度等因素,式(2)中3个方程实际上各自不相关,没有一个解可以同时满足3个方程。这时可以选出3个方程组(每个方程组包括两个方程),在针对每组方程得到的解后,进行适当的加权平均得到最终的UE位置。也可利用UE所在的小区ID(小区半径已知)进行验证和取舍。在实际计算时,如果UE可以观测到大于3个基站信号的OTDOA值时,采用适当的算法,对位置的计算精度提高有帮助,但相应计算量也会加大。
3.增强的OTDOA定位算法
增强定位算法同时利用了服务基站的波达方向(DOA/AOA)信息和终端观测的3个基站发射机信号到达时间(TOA)信息,并与利用OTDOA测量完成OTDOA方式的UE定位算法相结合,通过多信息、多算法的组合,以获得更好的定位效果。
假设同前,从减少计算量和终端高度能对定位精度影响较少等因素考虑,定位计算过程中暂不引入终端高度量。
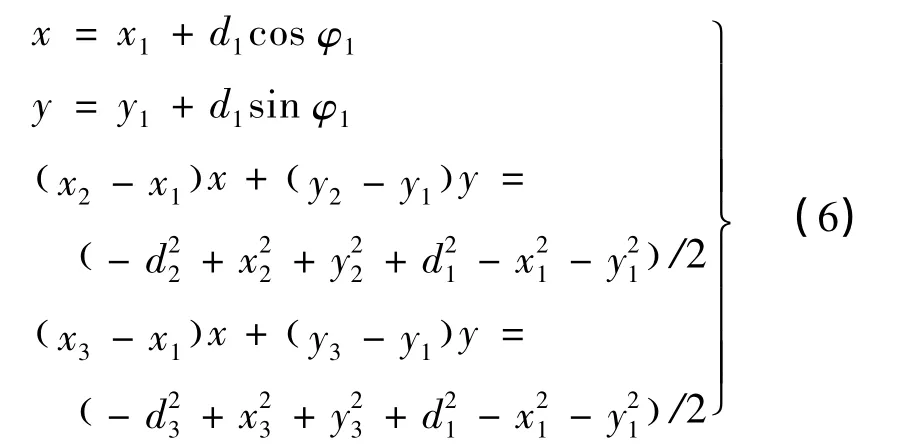
考虑单个基站,假设终端相对于服务基站的角度和时延分别为φ1和τ1,则可以得到终端的坐标估计为

考虑3个基站,第i个基站发射机的已知位置坐标为(xi,yi)(i=1,2,3),终端观测的第i个基站发射机信号到达时间(TOA)为τi(i=1,2,3),则终端和第i个基站发射机之间的距离为di=τic,可以得到非线性方程组

将式(4)进行线性化处理,可以得到

建立线性方程组
写成矩阵形式

式中
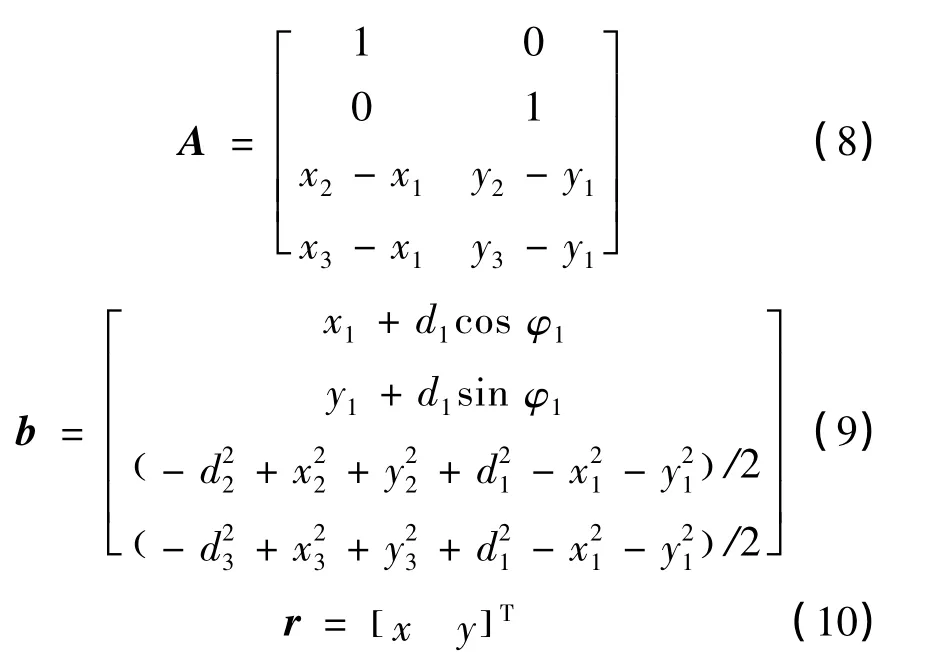
式中,A为4×2维矩阵;B为4×1维矢量;r为2× 1维矢量;AT表示矩阵A的转置。式(7)中方程个数大于未知数数目,是超定方程,采用加权最小二乘算法进行r的最优估计。
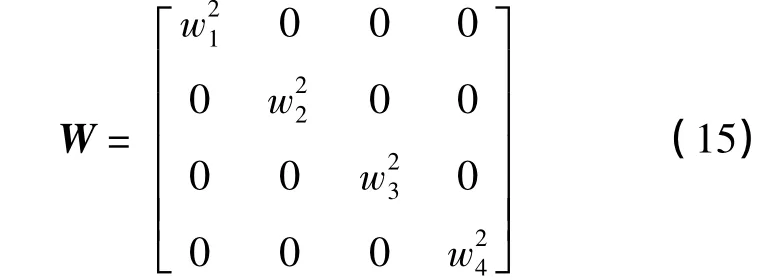
定义4×4维加权矩阵W,并定义加权误差函数

求解加权最小二乘问题,可以得到

式中,A-1表示方阵A的逆运算。求解r需要34次实数乘法,29次实数加法。
实际应用中如何定义加权矩阵W,还有待进一步研究,先设定3种加权方法,并通过仿真结果选定最终使用的加权矩阵。
(1)加权方法一
加权矩阵
式中,R为小区半径;Kb=3为基站数;P2和P3分别为移动台与第2和3个基站信道冲激响应的峰值功率。
(2)加权方法二
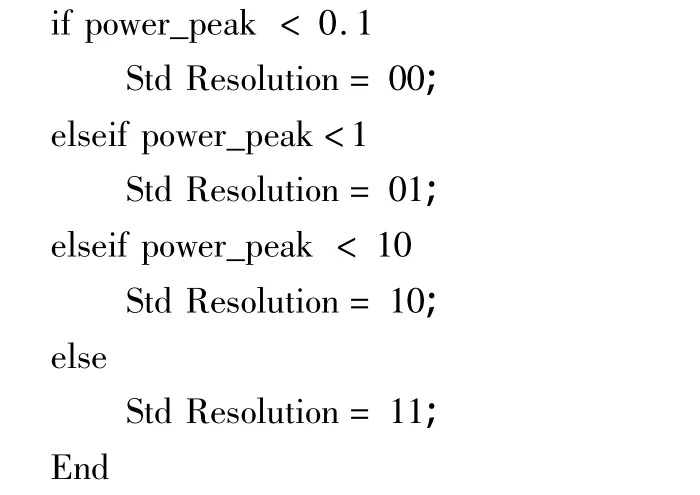
RNC与UE之间考虑用 UE positioning OTDOA quality(10.3.7.107)中的Std Resolution来传输峰(peak)值,该IE只有2 bit。
那么UE侧根据peak值来决定该IE的值
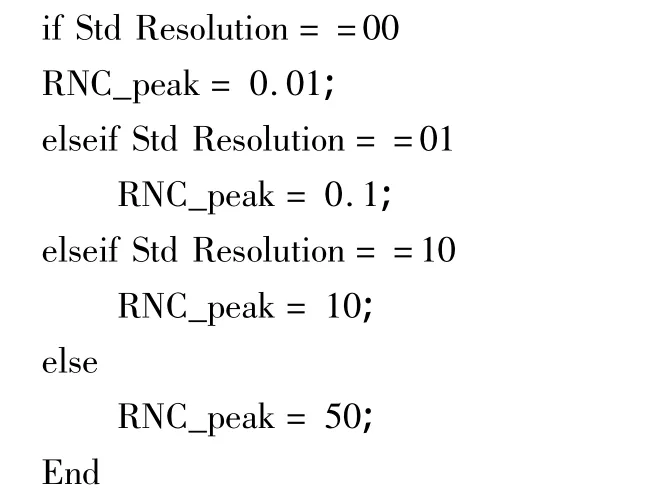
RNC收到该IE后,再转换成加权值,转换关系如下
则加权矩阵为
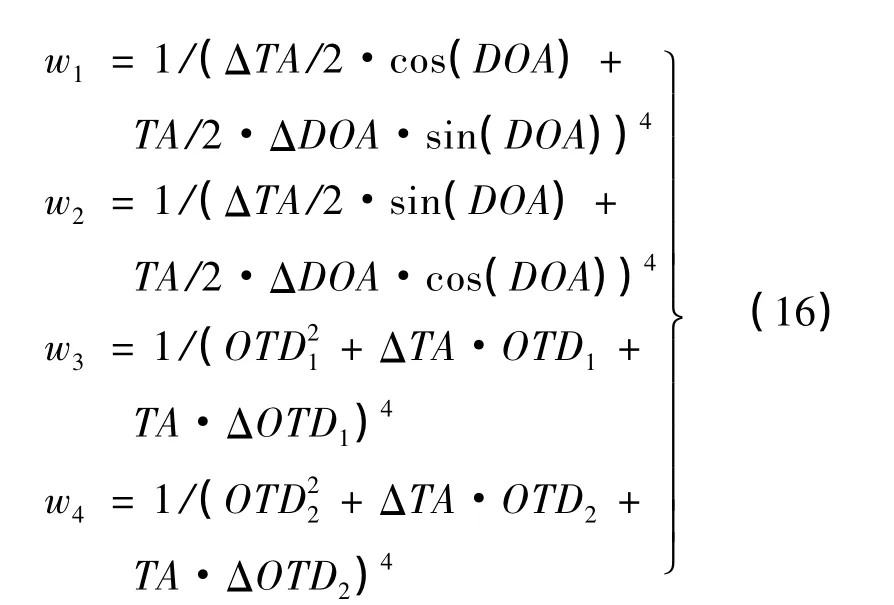
(3)加权方法三
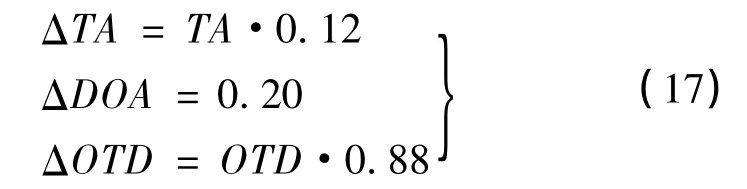
对各式误差进行估计
其中
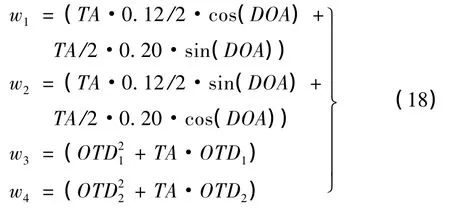
根据仿真结果中的数据,令
所以,W又可写为
三、增强的OTDOA定位算法实现
实现方法为:
1)设M个基站用于UE定位,UE通过辅助测量信息获得这M个基站的经度、纬度和高度信息。
2)将这M个基站的经纬度和高度信息变换到ECEF(earth-centered,earth-fixed)笛卡儿坐标系,设第i个基站经度为Loni,纬度为Lati,高度为hi,对应ECEF笛卡儿坐标系下的坐标为(Xi,Yi,Zi),则
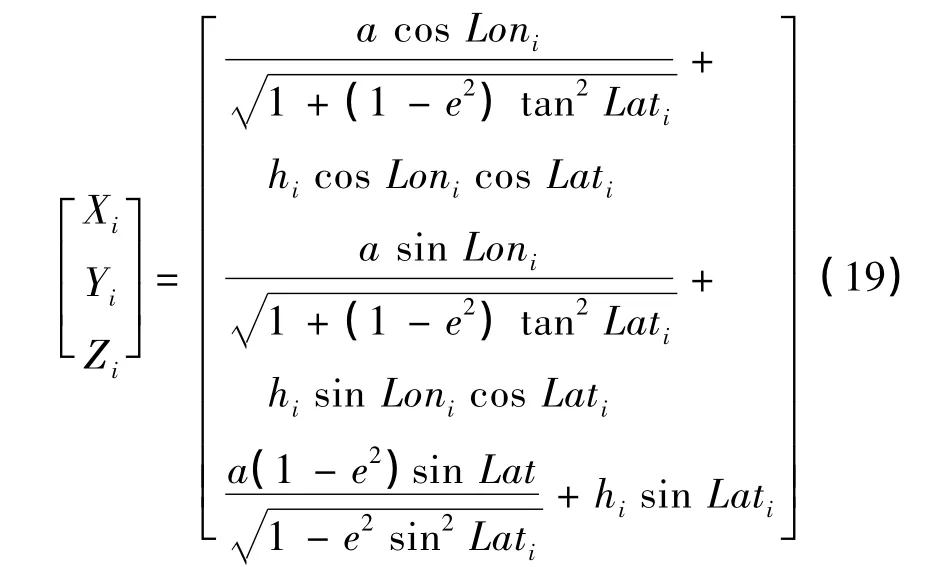
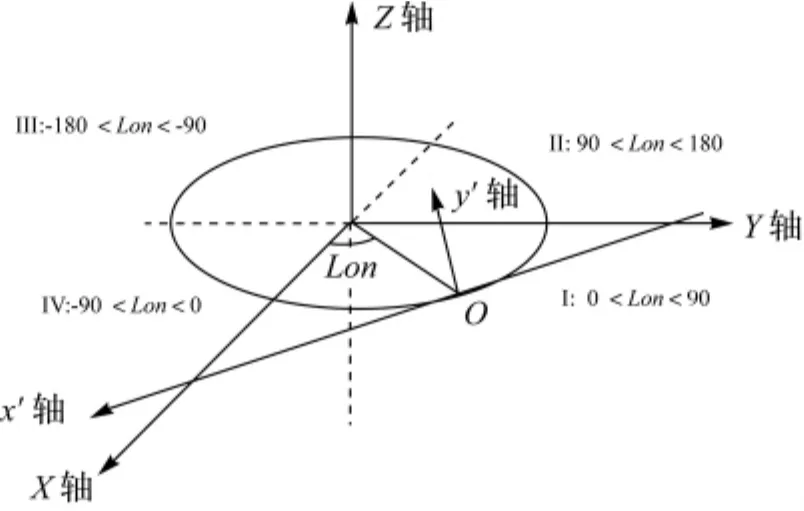
图1 坐标转换计算示意图
3)任意两基站间的距离Lij

将服务基站编号为1,与基站1距离最远的基站编号为2,其他相邻基站依次编号为3,4,…,M。
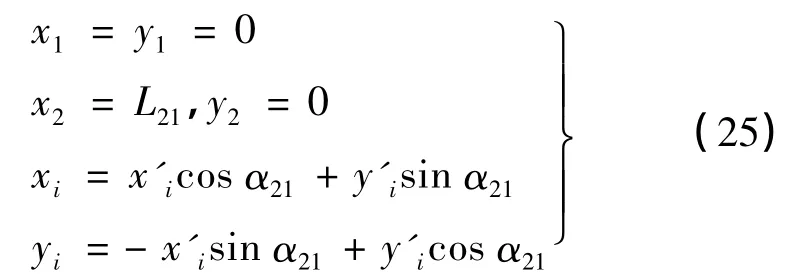
4)分别过服务基站所在的位置做地球椭球的切平面和水平面,水平面与赤道平面平行。由于各相邻基站的间距远小于地球半径,因此可以近似认为它们是处于同一切平面内。以服务基站位置为原点,以切平面和水平面的交线为x'轴,在切平面内建立平面直角坐标系x'Oy',且x'正方向与X正方向的夹角成锐角,y'的正方向与Y正方向的夹角成锐角。设基站i在x'Oy'坐标系下的坐标为(x'i,y'i),

当0°≤Lon1≤90°或90°≤Lon1≤180°时
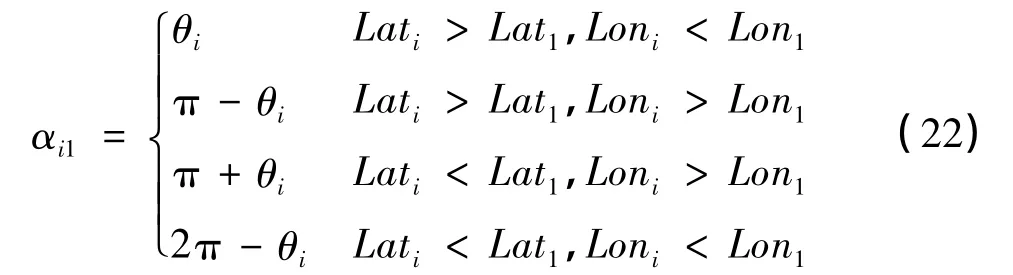
当 -180°≤Lon1≤-90°或-90°≤Lon1≤0°时
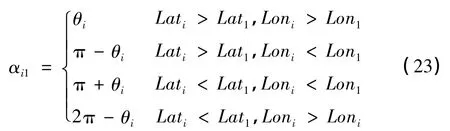
其中

5)为了便于计算,仍以服务基站位置为原点,以服务基站与基站2的连线为x轴,在切平面内建立另一平面直角坐标系xOy,x轴的正方向由基站1指向基站2。这样,x'轴和x轴的夹角为α21,即将x'Oy'通过坐标系旋转α21就可得到xOy坐标系。设基站i在xOy坐标系下的坐标为(xi,yi),则
6)在xOy直角坐标系进行定位计算
从减少计算量和终端高度对定位精确度结果影响较少等因素考虑,定位计算过程中暂不引入终端高度量,基站的高度也不考虑。
四、仿真结果及分析
1.仿真方案
模拟不同应用环境,对TD-SCDMA系统已实现的单基站智能天线定位、协议标准推荐的OTDOA定位及本文提出的增强的OTDOA等多种定位算法的性能进行仿真比较,完成TD-SCDMA系统定位功能测试,从而选择出稳定性和精确度都较高的定位算法。
(1)小区模型
小区及基站布局如图2所示。
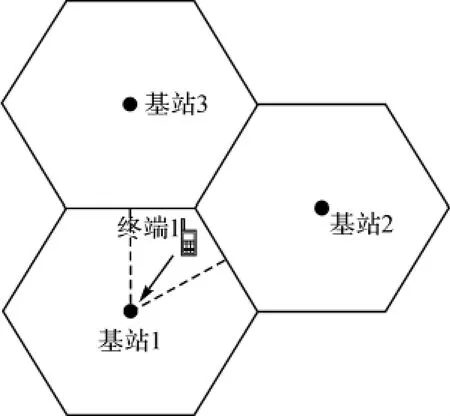
图2 小区布局
(2)仿真条件和前提假设
仿真中考虑单UE多小区的情况,基站1为UE所属基站,即服务基站,UE在图2区域内均匀分布。各小区半径相等,参与计算的小区个数可配置。信道模型包括路损、阴影衰落和快衰落,其中路损模型采用修正的 COST231Hata-Okumaru城市模型。信号传播环境考虑LOS(即存在直射径,且为多径中的主径)环境和NLOS(即不存在直射径)环境。
未加入散射体时,本小区NodeB到UE的时延用真实距离换算成时间并按照1/8 chip精度单位取整来近似;加入散射体时,利用散射体到NodeB和UE的距离和换算成时间并按照1/8 chip精度单位取整来近似每条径的时延。
信道是AWGN(加性高斯白噪声)、3GPP case3和ITU Vehicular A,速度为0 km/h或120 km/h,分别用v=0 km/h和v=120 km/h表示。
基站天线:均匀圆阵,圆半径为0.62波长,上行链路基站天线为8,下行链路基站天线为1。
信噪比:除特别说明外,以本小区基站功率(上行)或终端功率(下行)进行规一化,其他基站或终端考虑路损和阴影衰落,上行链路为每天线接收信噪比,下行链路为每天线发射信噪比,SNR=8 dB。
每子帧的路损、衰落情况独立。
2.仿真结果及分析
仿真结果采用图表结合的方式表现。UE坐标的误差均值,采用以下公式计算(单位:m)
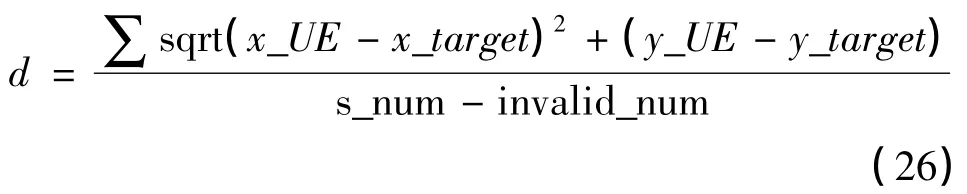
式中,s_num为统计次数;invalid_num为测量无效的次数。
图3~图5中用累计分布函数(cumulative distribution function,CDF),表征误差均值d出现的累计概率分布情况。
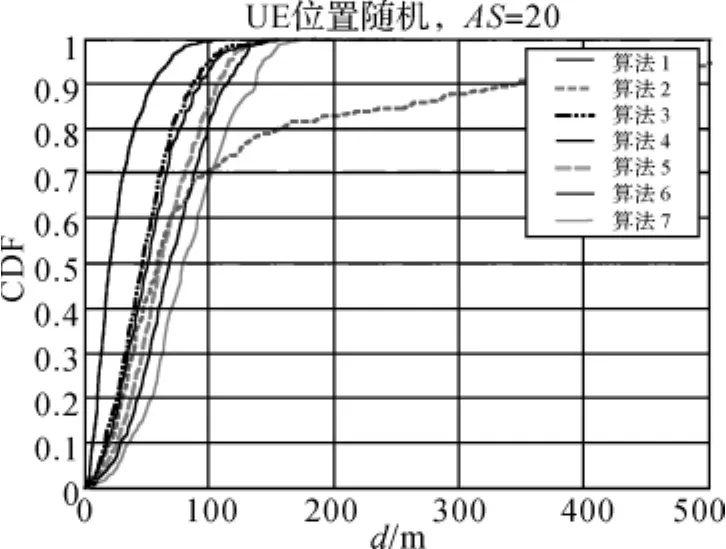
图3 定位误差累计概率分布
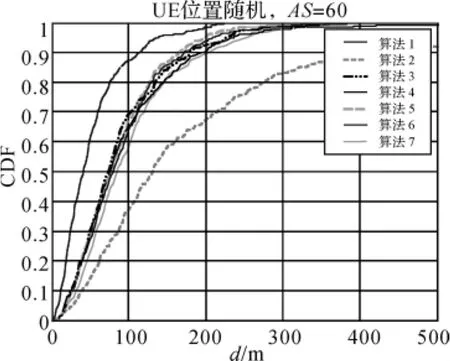
图4 定位误差累计概率分布
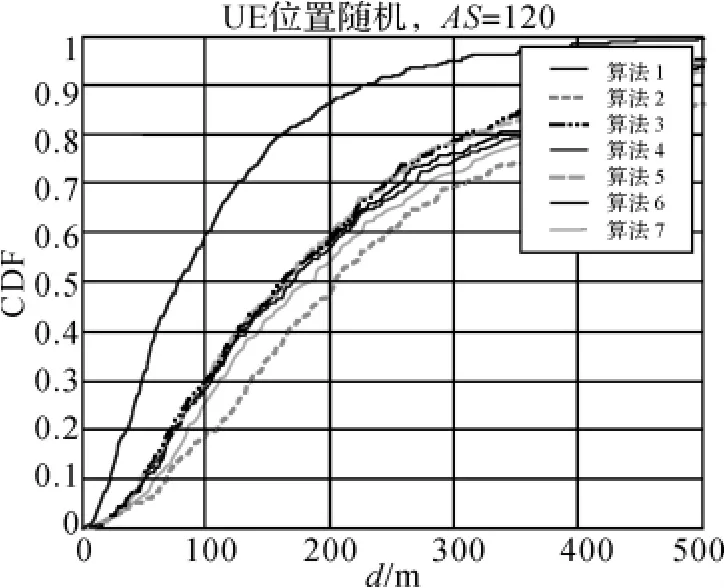
图5 定位误差累计概率分布
图3~图5中各虚线和算法的对应关系如下:
① 算法 1(智能天线,peak值);② 算法2 (OTDOA,3个基站);③ 算法3(智能天线+圆);④算法4(智能天线+圆,加权1);⑤算法5(智能天线+圆,加权2);⑥算法6(智能天线+圆,加权3);⑦算法7(智能天线,start值)。
1)UE位置在图2虚线区域内随机变化,每20 ms改变一次,散射角度为(-10,10),400个采样点。各算法定位误差累计概率分布如图3所示。
2)UE位置在图2虚线区域内随机变化,每20 ms改变一次,散射角度为(-30,30),400个采样点。各算法定位误差累计概率分布如图4所示。
3)UE位置在图2虚线区域内随机变化,每20 ms改变一次,散射角度为(-60,60),400个采样点。各算法定位误差累计概率分布如图5所示。
根据仿真结果可以看出算法6(智能天线+圆,加权3)在各种环境下性能比较稳定。只是在极端恶劣的环境(UE距基站较远且扩散角很大,这时Tadv和OTDOA误差都比较大)中,定位误差比较大,误差均方值为150 m左右。
因此,在RNC进行定位系统具体实现中采用算法6,将OTDOA和智能天线定位方法结合使用,获取UE位置估计定位结果,并使用测量误差估计方法对定位结果进行加权,且在Tadv测量取值时使用peak值,可在计算量和定位测量操作复杂度没有显著增加的情况下获得较高精度的定位结果。
五、结束语
本文基于TD-SCDMA的系统设计构架和技术提出一种适用于TD-SCDMA的新型的增强型定位算法,并给出了算法的理论推导。该算法将基本定位算法和OTDOA定位算法融合在一起,并在此基础上作了进一步的研究,提出一种将智能天线定位和OTDOA定位相结合的新的增强OTDOA定位算法,此算法进一步提高了UE的定位精度。
[1] 李世鹤.TD-SCDMA第三代移动通信系统标准[M].北京:人民邮电出版社,2003.
[2] 薛海中,李鹏,张娟,等.基于局部频谱连续细化的高精度频率估计算法[J].西安电子科技大学学报:自然科学版,2007,34(1):21-25.
[3] 3GPP.TS 25.305 Stage 2 Functional Specification of User Equipment(UE)Positioning in UTRAN[S].[s.l.]:3GPP,2003.
[4] CAFFERY J J,STUBER J L.Overview of Radiolocation in CDMA Cellular Systems[J].IEEE Communication Magazine,1998,36(4):38-45.
[5] 谢显中.TD-SCDMA第三代移动通信系统技术与实现[M].北京:电子工业出版社,2004.
A Location Algorithm with the TD-SCDMA System
LUO Mingshi,WEI Erhu,GAO Lin
0494-0911(2011)07-0004-05
P228.4
B
2010-08-05
国家973计划资助项目(2006CB701301);国家863计划资助项目008AA12Z308);国家自然科学基金资助项目(40974003)
雒明世(1966—),男,陕西礼泉人,副教授,主要研究方向为交换传输、无线通信网络。
猜你喜欢
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
中国交通信息化(2017年10期)2017-06-06
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
电子制作(2016年15期)2017-01-15
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
