基于SIMULINK的输出模块应用
2011-11-15 05:03:14姜树杰
天津职业院校联合学报 2011年11期
姜树杰
基于SIMULINK的输出模块应用
姜树杰
(天津冶金职业技术学院,天津市 300400)
简要介绍了Simulink工具箱在仿真应用中输出模块的应用,在如何应用数字显示模块、示波器模块获得直观、简明、清晰的数据输出;图形显示的方法上做出尝试。
Simulink;仿真;输出;图形
Simulink是MATLAB的一个重要的工具箱,是结合了框图界面和交互仿真能力的系统级设计和仿真工具。它以MATLAB核心数学,图形和语言为基础,可以完成从算法开发,仿真或者模型验证的全过程,为用户提供了很方便的图形化功能模块,以便连接一个模拟系统,简化设计流程,减轻设计负担。
Simulink作为面向框图的仿真软件,具有以下的特点:
用方框图的绘制代替了程序的编写、结构和流程清晰。
输入、输出信号来源形式的多样化。其输入信号可以是各种信号发生器;也可以来自一个设定的记录文件;还可以来自MATLAB的工作空间(workspace)。输出信号也类似,这就扩大了仿真系统与各种外部软件和硬件的接口能力。
仿真的建立和运行是智能化的且仿真精细贴进实际。
从宏观角度看,SIMULINK模型通常包含三种 “组件”:信源(source)、系统(system)、及信宿(sink)(也即题目中的输出模块)。
构成任何一个仿真系统框图有三个步骤,即选定典型环节、相互联结和给定环节参数。在上述步骤完成后,将信源引入系统,仿真的结果就会由信宿显示出来,所以说信宿是观测系统运行结果最直观的工具。仿真结果的研究是仿真研究的关键所在,因此信宿的重要性可见一斑。
一、数字显示模块______将输入信号用数字形显示出来
当输出信号是直流信号时,我们就可以把它直接送到这个模块中,从模块窗口中直接读出数值的大小。
例如:已知图1电路参数R1=2Ω,R2=4Ω,R3=12Ω,R4=4Ω,R5=12Ω,R6=4Ω,R7=2Ω,Us=10V。求i3,U4,U7。
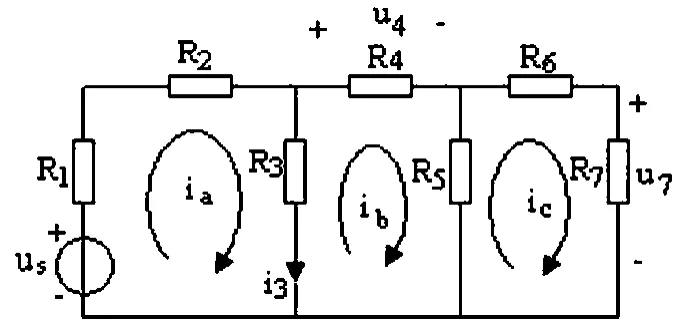
图1

图2
在SIMULINK环境中构建如图2所示的仿真电路将display模块直接观测所求的被测量,i3,U4,U7可在display1、display、display2中直接观测到所求结果为,0.3704A、2.222V、0.7407V。可见display的显示,便捷、直观。
二、示波器模块______将输入信号在示波器中以时域方式显示出来
该模块实时显示信号的波形,可以接受多个输入信号,每个端口的输入信号都将以不同的颜色在一个坐标轴中显示。不管示波器是否打开,只要仿真一起动。示波器缓冲区就接受送来的信号。
1.示波器的工具栏
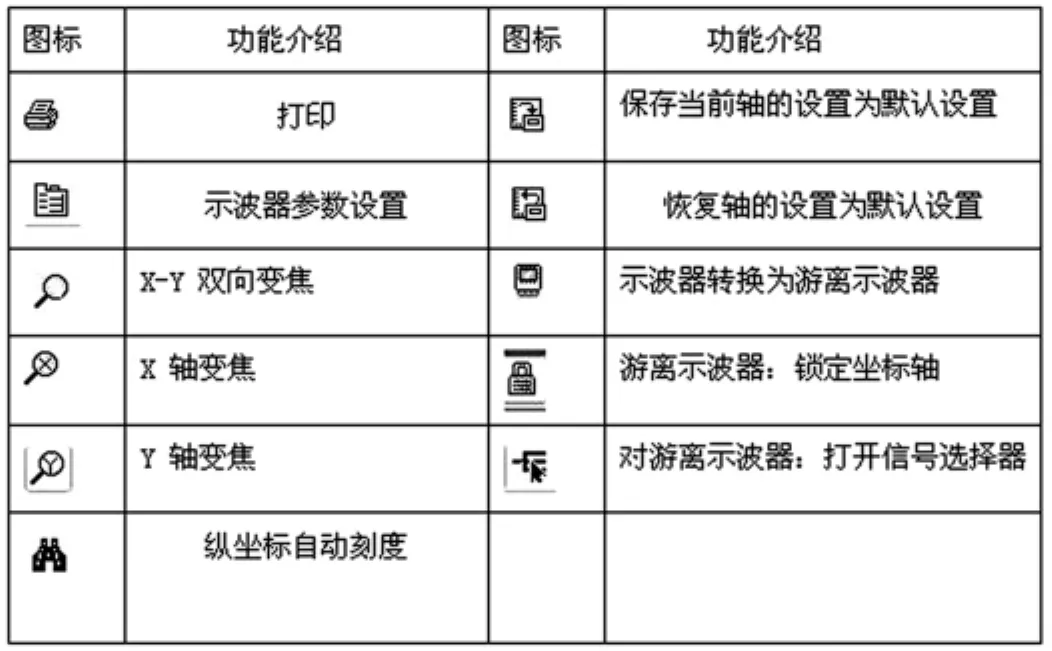
2.示波器参数的手工设置
(1)示波器纵坐标范围的设置:在坐标框内单击鼠标右键,在弹出的快捷菜单中执行“Axes properties”命令,可以对坐标轴根据需要进行调整,如图3所示。“Y-min”、“Y-max”分别是设置Y轴的上、下限。
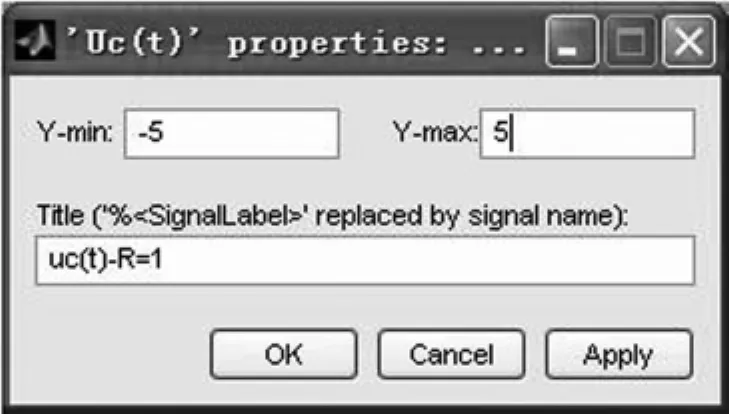
图3
图4
(2)示波器横坐标范围的设置
1)“Number of axes”文本框:用于设置轴的个数,可以用于实现对多个输入信号的显示(若设置为2则相当于双踪示波器)。在实际应用中当需要显示多路信号时,我们经常采用Simulink工具中信号与系统模块组中的混路器(MUX)将多路信号依照向量的形式混合成一路信号将这些信号同时显示出来。这在仿真结果的相互比较中经常运用。
2)“Time range”文本框:用于设置 X 轴(即时间轴)的显示范围。“Time range”栏缺省为10,即意味着显示在[0,10]区间的信号。假如信号实际持续时间超过设定值,则不显示区间外的内容。因此可根据仿真中所观测到波形的实际情况,设置该内容以观测到完整的输出波形。
借助于Simulink中信宿库中的Scope模块,可以便捷地实现信号的时域表示,但输出采用scope显示时,输出图形没有任何标记,也不能嵌入文件,如果需要得到有坐标轴标注和带有标识的输出图,就必须再做点工作。
三、用plot语句绘制图形
1.绘出图形
Simulink在得出仿真结果后,该结果将自动返回到MATLAB的工作空间中,其中时间变量名为tout,输出信号的变量名为yout,等scope显示出来图像以后,在matlab上运行plot(tout,yout)则可以立即绘出输出响应曲线。
2.给图形加标住
在用plot(tout,yout)指令得到的图形中,选择工具栏中的insert-xlabel、insert-ylabel在高亮处即可为横、纵坐标填加标识。选择工具栏中的insert-text和insert-arrow可在图中为显示的图形标识。这在改变系统参数、同时显示多个图形进行效果比较的时候尤其重要。
3.将图形输出
在将上述的图形标注完成后选择工具栏中的edit_copy figure在一个打开的
Word文档中粘贴即可以将图形导出到文档中,这样一个输出图就可以很方便的为后续的需要服务了。
四 、应用示例
图5所示为为同一坐标中显示的PI PD PID三种控制策路在阶跃输入作用下,突加负载时控制效果对比研究的输出响应。(0秒时加阶跃给定,1.5秒时突加负载,被控系统为直流电机)
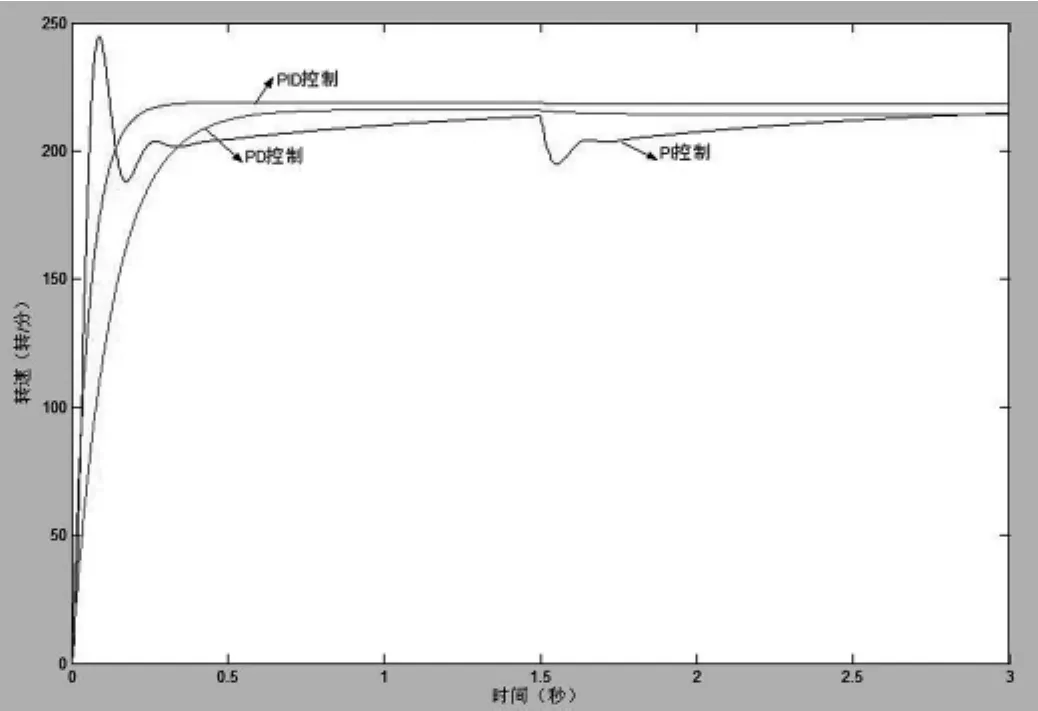
图5
在上面的示例中我们为横轴标注了[时间(秒)],为纵轴标注了[转速(转/分)];为图中的三条特性分别标注了PI控制、PD控制、PID控制,这样经过标注的输出结果简明清晰,一目了然。
Simulink的信宿库中除了上述介绍的Scope、display模块,还有Out、
x-yGraph、To Wokspace模块等,在此不一一赘述。希望Scope、display模块的应用能给大家带来一定的帮助。
[1]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术及应用[M].北京:清大学出版社,2000.
[2]张志涌,徐彦琴.MATLAB教程—6.X版本[M].北京:航空航天大学出版社,2001.
[3]程卫国.MATLAB5.3精要编程及高级应用[M].北京:机械工业出版社,2000.
Applications of SIMULINK-based Output Module
JIANG Shu-jie
(Tianjin Metallurgical Technology Professional College,Tianjin300400 China)
This thesis briefly introduces how Simulink toolbox applies in simulation output modules.It also describes how to apply the digit display module and the oscilloscope module to obtain an intuitive,concise and clear data output.In addition,it attempts the method of graphical display.
Simulink;simulation;output;graphics
TP317
A
1673-582X(2011)11-0057-04
2011-09-12
姜树杰(1964-),男,天津市人,天津冶金职业技术学院,副教授。
猜你喜欢
科技信息·学术版(2021年19期)2021-10-25 02:13:36
导航定位学报(2020年2期)2020-04-13 08:41:10
传感器与微系统(2019年7期)2019-06-25 05:47:22
测控技术(2018年3期)2018-11-25 09:45:52
作文·初中版(2017年12期)2017-12-23 17:33:20
电子技术与软件工程(2016年23期)2017-03-06 19:57:04
作文中学版(2017年12期)2017-02-15 22:13:28
电脑知识与技术(2014年18期)2014-07-28 05:05:44
自动化博览(2014年10期)2014-02-28 22:33:42
铁路通信信号工程技术(2014年1期)2014-02-28 16:54:59