基于Matlab的模糊自整定PID控制器设计
2011-10-26 09:51:18韩维建
中国科技信息 2011年13期
韩维建
哈尔滨第二电业局,黑龙江哈尔滨 150076
基于Matlab的模糊自整定PID控制器设计
韩维建
哈尔滨第二电业局,黑龙江哈尔滨 150076
本文通过将模糊控制和PID控制结合起来,应用模糊推理的方法实现对PID参数进行在线自整定,实现PID参数的最佳调整,设计出了参数模糊自整定PID控制器,并进行了Matlab/ Simulink仿真,研究的PID控制器参数的自动整定技术适应了复杂工况高指标的控制要求。
PID;模糊;Matlab;自适应;控制系统
引言
PID控制和模糊控制广泛应用的各个系统和领域中,其中PID控制中关键问题是PID参数的整定。单纯的模糊控制器不能消除稳态误差,只能提高模糊控制器的精度和跟踪性能。将PID控制和模糊控制结合在一起使用,构成模糊P I D控制器或模糊自整定PID,根据专家知识和操作经验,依据偏差和偏差变化率的大小来调整P、I、D三个参数大小,这在很大程度上弥补了传统控制算法的局限性,从而取得良好的控制效果。
1 控制系统结构
模糊自整定PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊规则在线对PID参数进行修改,便构成了自整定模糊PID控制器,控制系统结构如图1所示。

图1 模糊自整定PID控制器结构
2 模糊控制器的设计
(1)语言变量隶属度函数的确定
模糊控制器采用两输入三输出的形式,以e和ec为输入语言变量,ki、kp和kd为输出语言变量。输入语言变量的语言值均取为“负大”(NB)、“负中”(NM)、“负小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB) 7种。输出语言变量的语言值均取为“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB) 4种。将偏差e和偏差变化率ec量化到(-3,3)的区域内,输出量化到(0,3)的区域内,隶属函数曲线见图2。
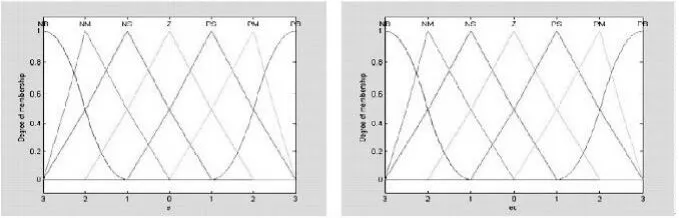
图2 e和ec隶属函数曲线
(2)建立模糊控制器的控制规则表
根据参数kp、ki和kd对系统输出特性的影响,可得出在不同的e和ec时,参数的自整定原则。
①当|e|很大时,不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。同时为了防止积分饱和,此时应取较大kp,较小的ki和kd取零。
②当e×ec>0时,说明误差在朝误差绝对值增大方向变化。此时若误差较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差绝对值,此时取较大的kp、kd不能太大,取较小的ki值。若误差绝对值较小,控制器实施一般的控制作用,只要扭转误差的变化趋势,使其朝误差绝对值减小方向变化。
③当e×ec<0或e=0时,说明误差的绝对值朝减小的方向变化,或者已达到平衡状态。此时,可采取保持控制器输出不变。
(4)当e×ec=0,ec≠0时,表明系统的曲线与理论曲线平行或一致,为使系统具有良好的稳态性能,应采取较大kp和ki值,同时避免设定值附近振荡,并考虑系统的抗干扰性能,适当选取kd值。设
式(1)中k’p、k’i和k’d为系统的经典PID参数,一般用Z-N法来确定。根据PID参数的整定原则及专家经验,采用IFTHEN形式,可得Δkp、Δ ki和Δ kd的整定规则。
将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。


其模糊子集为e,ec={NB,NM,NS,O,PS, PM,PB},子集中元素分别代表负大,负中,负小,零,正小,正中,正大。根据kp、ki和kd三个参数模糊规则表构造一个两输入(e, ec)三输出(Δ kp、Δ ki、Δ kd)的模糊控制器,取名为fuzzpid.fis。
3 Matlab仿真
(1)模糊控制器的编辑
在Matlab命令窗口运行Fuzzy函数进入模糊逻辑编辑器,并建立一个新的FIS文件,选择控制器类型为Mamdani型,根据上面的分析分别输入e,ec、kp、ki和kd隶属函数和量化区间,以If-then的形式输入模糊控制规则。取与(and)的方法为min,或(or)的方法为max,推理(implication)方法为min,合成(aggregation)方法为max,去模糊化(defuzzification)方法为重心平均(centroid),这样就建立了一个FIS系统文件,取名为pid.fis。当然也可以用M A T L A B命令来完成,在Matlab下运行fuzzy fuzzpid.fis可进入Matlab动态仿真工具箱仿真环境。
(2)仿真实例
设被控对象为:

采样时间为1ms,采用模糊PID控制进行仿真,参数的初值分别为: kp=0.4、ki=0和kd=0,在第300个采样刻控制器输出加100%的干扰,相应响应曲线见图3、4。
[1]董宁.自适应控制[M].北京理工大学出版社.2009年3月
[2]周黎英,赵国树.糊PID控制算法在恒速升温系统中的应用[J].器仪表学报.2008(29)
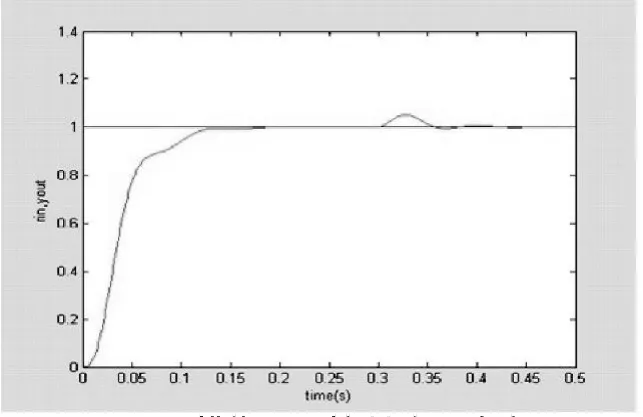
图3 模糊PID控制阶跃响应

图4 kp.ki.kd的自整定过程
对于3阶对象,普通PID控制很难获得好的控制效果,同时3个参数也不易确定,但采用模糊自整定PID控制器,却取得了良好控制效果。从系统的性能指标可看出系统具有良好的快速性和稳态精度,且抗干扰能力强,是一种较好的控制方案。
4 结束语
模糊自整定PID是在常规PID算法的基础上,通过计算当前系统误差e和误差变化率 ec,利用模糊推理系统FIS,查询模糊矩阵表进行参数调整,该方法实现简单、方便易用,对实际控制有重要指导意义。
10.3969/j.issn.1001-8972.2011.13.060
猜你喜欢
湖南电力(2021年4期)2021-11-05 06:44:42
初中生世界·九年级(2020年9期)2020-09-21 08:43:33
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
电测与仪表(2016年14期)2016-04-11 12:32:40
通信电源技术(2016年5期)2016-03-22 01:09:57
地震地质(2015年3期)2015-12-25 03:29:53
电源技术(2015年11期)2015-08-22 08:50:38
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17