一种MEMS加速度计温度模型辨识及温度补偿方法*
2011-10-20 10:54:48张丽杰
传感技术学报 2011年11期
张丽杰,常 佶
(内蒙古工业大学电力学院,呼和浩特 010051)
MEMS(Micro Electro-Mechanical System)加速度计是微小型惯性导航系统中重要的传感器之一,其性能的优劣直接影响了惯导系统的导航精度。MEMS加速度计测量输出误差主要来源于制造工艺、安装方法、外部环境等几方面,其中环境温度对MEMS加速度计测量输出的影响尤为突出[1],它也成为微加速度计工程应用中的一个关键问题。目前,常用局部温控和软件方法实现温度补偿。局部温控通常需改变加速度计的内部结构、材料或增加温度控制系统[2-5],实现复杂,所以工程中更多采用软件方案进行补偿[6-10],补偿后可使加速度测量稳定性提高 5 ~20 倍[7-8,10]。软件补偿方案是以获得加速度计温度模型为前提的,通常需要设计专用的温控盒或复杂的测试设备进行模型辨识实验,如文献[7-8]设计了独立的高精度温控盒,并借助分度头辨识加速度计的温度模型;文献[9]采用温控转台和分度头辨识加速度计的温度模型;文献[10]尽管采用六面体作为加速度计的安装基准,但仍需自制的温控箱才能在水平台面上完成翻滚实验。
为了降低加速度计温度模型辨识对设备的依赖,简化标定工作,本文将MEMS三轴加速度计粘贴在高精度铝合金六面体上作为实验用测量模块(与实际应用的微惯性测量单元具有相同的结构模式),对MEMS加速度计的温度模型与其倾角的相关性进行分析,提出了一种无需精确控制加速度计位置的温度模型辨识方法和相应的温度补偿软件方案,并用实验验证了补偿后MEMS加速度计测量输出的稳定性。
1 实验系统结构及加速度计的温度模型
1.1 实验系统结构
实验系统结构如图1所示,采用热敏电阻作为温度传感器,在微处理器中对采集得到的加速度数据进行处理和温度补偿,并将补偿结果通过串口输出。同时,为了便于标定、减小安装误差、保证加速度计和温度传感器处于一个热量场内,将热敏电阻和加速度计粘贴在高精度铝合金六面体的一个面上。
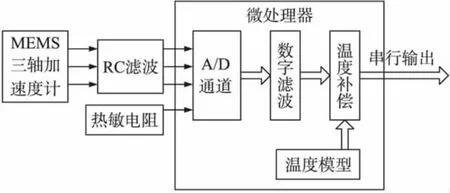
图1 实验系统原理框图
实验用加速度计的主要性能指标为:工作电压为3.3 V;工作电流为0.5 mA;量程可变,最大测量范围为±6 gn;最高分辨率为0.8 V/gn;噪声均方根为4.7 mVrms。为了降低加速度测量噪声,微处理器内集成了数字滤波算法。
1.2 加速度计的温度模型
加速度计的静态模型如式(1)所示:

其中,y-加速度计输出(V);K0-零位输出(V);K1-标度因子(V/gn);K2-二阶非线性系数(V/gn2);K3-交叉耦合系数(V/gn2);ai-平行于加速度计输入轴的加速度(gn);a0-横向加速度(gn)。对于3.3 V供电的加速度计,由于K2和K3通常为 10-4量级[11],所引起的非线性误差小于0.5%,因此可忽略加速度计输出中的非线性项和交叉干扰项,进而可采用式(2)根据加速度计测量输出求出真正的加速度值。

对加速度计进行温度建模的实质就是确定加速度计的零位输出K0和标度因子K1与温度之间的关系。如果得到不同温度下加速度计的K0和K1,则可采用一次曲线拟合的方法得到温度模型,如式(3)所示[12]。

其中,T为环境温度,K00、K01、K10、K11为待定系数。
2 加速度计温度模型辨识方法
2.1 零位输出和标度因子的获取方法
根据加速度计静止不动时敏感重力矢量的原理,在某一温度下,可用式(4)得到加速度计的零位输出和标度因子。

其中,y0、y1是加速度计敏感轴与重力向量夹角分别为90°和0°时的加速度计输出电压值,g为重力加速度。
为了得到加速度计的零位输出和标度因子,需要精确控制加速度计水平和垂直放置,这就要求具备温控转台或制作温控盒才能完成模型辨识,但若能根据加速度计在具有一定倾斜角时的温度特性推算出其处于水平和垂直位置时的温度特性,则可不依赖于复杂或专用的实验装置,在无需调平装置的普通恒温箱中即可完成温度模型中系数的标定。
2.2 加速度计温度模型与倾角的关系
本文对加速度计敏感轴在水平和垂直附近的温度特性进行测试与分析。首先将加速度计放置在恒温箱中,放置方法如图2所示,包括水平、水平左倾、水平右倾、垂直、垂直左倾、垂直右倾等6种状态,倾斜放置时的倾角大约为4°和8°;之后控制加速度计所处的环境温度分别为5℃、15℃、25℃、35℃、45℃,待温度稳定后采集加速度计输出值;最后对不同位置各温度点加速度计输出值采用最小二乘法进行直线拟合,拟合结果见式(5)。
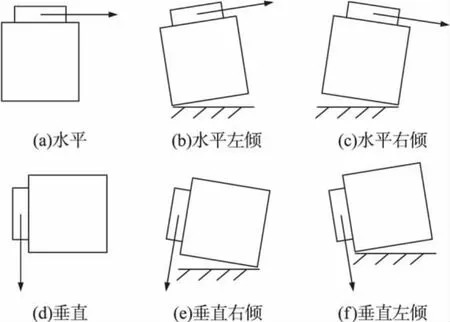
图2 加速度计放置方法

由式(5)可知,在水平位置附近的拟合直线斜率相差不大于0.00008 V/℃,在垂直位置附近的拟合直线斜率相差不大于0.00007 V/℃,并且在垂直位置附近倾斜角越大则拟合直线的斜率相差越大。不妨设环境温度为30℃,则0.000 08 V/℃的斜率误差会导致3 mgn的测量误差。采集一段时间内加速度计的测量输出,对噪声进行统计分析的结果为标准差介于2 mgn~2.3 mgn之间。因此可以得出以下结论:在不同温度条件下测量加速度计的零位输出和标度因子时,尽管加速度计的敏感轴与重力向量没有严格的平行或垂直,若倾斜角较小,得到的温度模型系数K01和K11仍是可用的。
2.3 无需调平的温度模型辨识
获得式(3)中的系数K01和K11并不需要严格的将加速度计水平放置或垂直放置,为此借助一个水平台面和一个普通恒温箱,设计以下步骤来辨识加速度计的温度模型。
(1)将系统放置在水平台面上,使加速度计敏感轴平行于台面,采集并记录此时的温度T0和加速度计输出y0;使加速度计敏感轴垂直于台面,采集并记录此时的温度T1和加速度计输出y1。由式(4)可知,(T0,y0)和(T1,(y0-y1)/g)满足式(3)温度模型所述关系。
(2)将系统平放于恒温箱中,控制环境温度分别为5℃、15℃、25℃、35℃、45℃,待温度稳定后采集加速度计输出值;再将系统竖直放置在恒温箱中,重复此项实验。对采集结果进行最小二乘直线拟合,不妨设拟合结果为式(6)。

由于加速度计在某位置附近具有相同的温度系数,所以式(3)中的斜率系数可由式(7)得到。


2.4 温度模型的可用性分析
基于位置近似的方法辨识加速度计温度模型引入的加速度测量误差为

其中,E-测量误差(mgn);Ek-位置近似引入的温度模型的斜率误差(V/℃);T-环境温度(℃),R-加速度计分辨率(V/gn)。对于实验用加速度计,若位置倾斜误差小于8°,则引入的测量误差见表1。由表1可知,忽略位置误差的温度模型可用于噪声容限为5 mgn、工作温度为5℃ ~40℃、加速度计分辨率不小于0.6 V/gn的应用中。

表1 加速度计温度模型引入的测量误差
因此,无需调平的温度模型辨识方案是否可用取决于辨识模型时的加速度计位置倾斜误差、加速度计的分辨率、环境温度以及应用场合对测量误差的敏感程度等几方面,温度模型引入的加速度测量误差越小则其可用性就越强。
3 加速度计的温度补偿
3.1 温度传感器的标定
为了获得系统所处的环境温度,需要提前标定温度传感器。温度传感器的数学模型见式(10)。

其中,Tc为温度传感器的输出电压,T为环境温度,t0和t1为待定系数。为了确定t0和t1,将系统放置在恒温箱中,控制系统所处的环境温度分别为5℃、15℃、25℃、35℃、45℃,待温度稳定后采集温度传感器的输出值,对输出结果进行最小二乘直线拟合即可。
3.2 软件设计
将辨识得到的加速度计和温度传感器的温度模型参数写入微处理器的Flash中,对加速度计测量信息进行实时补偿,补偿流程如图3所示。
为了保证数据处理的实时性,传感器数据的采集和滤波在中断服务程序中完成,在主程序中只需判断滤波处理是否完成,若完成则读取滤波后的结果进行补偿计算。
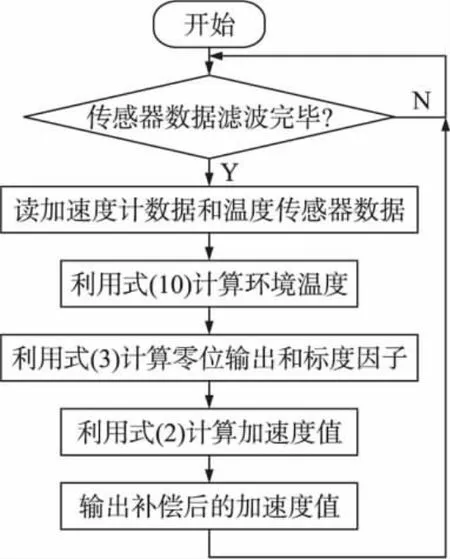
图3 温度补偿软件流程
3.3 实验结果
3.3.1 温度模型辨识实验
(1)采用3.1所述方法标定系统的温度传感器,对不同温度时温度传感器输出的拟合结果见图4,得到t0=-285.641,t1=191.569。
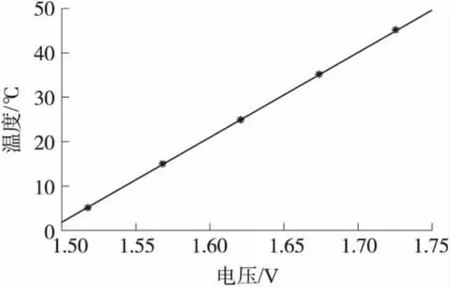
图4 温度传感器模型辨识结果
(2)采用2.3所述方法对加速度计进行温度模型辨识,得到K00=1.8913,K01=-0.00468,K10=0.90135,K11=-0.00656,将它们写入微处理器的Flash中。
3.3.2 温度补偿实验
进行温度补偿前后的对比实验,其中,没有温度补偿时,加速度计始终采用理想的零位输出和标度因子。
(1)系统上电后,观测10 min内温度补偿前后加速度计的测量输出,以及模块温度的变化情况,如图5所示。
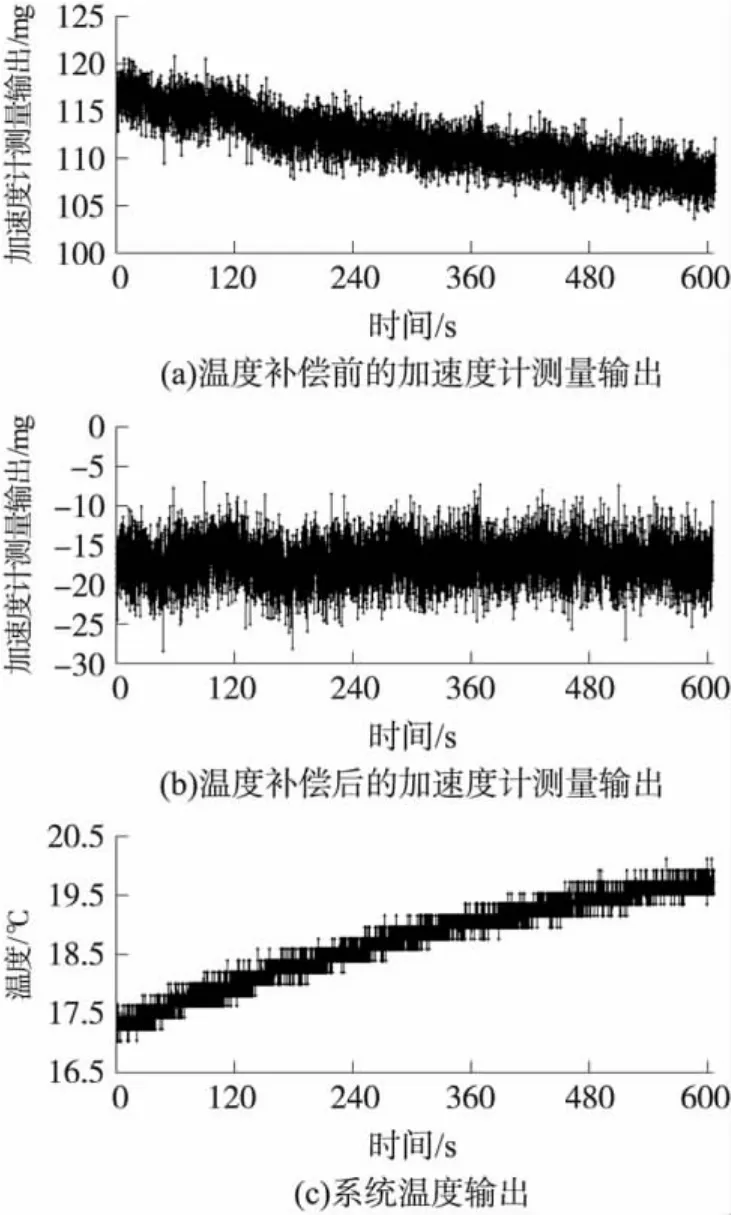
图5 系统上电10 min内加速度计输出和温度输出
图5表明,系统上电10 min内,温度上升约2℃,若没有温度补偿,加速度计的理想零位与真实零位存在较大偏差,且随着时间推移,加速度计测量输出呈下降趋势;而经过温度补偿后,加速度计测量输出始终平稳。分别计算图5(a)和(b)中最初10 s和最后10 s的数据平均值,无温度补偿时分别为116.95 mgn和108.01 mgn,有温度补偿时分别为-17.21 mgn和-17.42 mgn,即10 min内温度补偿前后加速度计测量输出的改变量分别为8.94 mgn和0.21 mgn。
(2)将系统放在恒温箱中,使环境温度分别为5℃、15℃、25℃、35℃、45℃,待温度稳定后,连续采集10 s温度补偿前后的加速度计输出数据,并分别对其求平均,结果见表(2)。根据表(2)可计算得到温度补偿前后加速度计测量输出的标准差分别为5.85 mgn和 54.39 mgn。

表2 温度补偿前后加速度计测量输出结果
实验结果表明,经过温度补偿后,系统上电初始化后即可正常使用,并且温度补偿后的加速度计测量输出稳定性较温度补偿前提高了一个数量级,说明补偿效果明显,温度模型的辨识方法和补偿效果有效。
借助加速度计可测量载体静止时的倾斜角[13],将MEMS三轴加速度计用于某小型无人机航姿测量系统中,估计飞行器在静态和匀速直飞时的姿态角,外场试飞试验发现,当室内(器件标定环境)和室外(器件使用环境)存在约20℃的温差时,若没有温度补偿,姿态测量误差可达20°;而采用文中所述温度补偿方案后,姿态测量误差小于1°。
4 结论
鉴于MEMS加速度计处于某位置附近时,可认为其温度模型具有相同斜率系数的前提,本文提出一种不用精确控制加速度计位置的温度模型辨识方法,有效地降低了环境温度对MEMS加速度计测量输出的影响,简化了标定工作。实验结果表明,温度补偿后MEMS加速度计测量输出的稳定性提高了一个数量级。该方法已经成功应用于某小型无人机航姿测量系统中,不但能够在温差较大的环境中为载体提供稳定可靠的加速度信息,而且有效的缩短了系统启动时间。
[1]翁彦雯,董景新,刘云峰.微机械加速度计的温度特性实验研究[J].航空精密制造技术,2004,40(4):37-40.
[2]Lakdawala H,Fedder G K.Temperature Control of CMOS Micromachined Sensors[C]//Proc.of the Fifteenth IEEE International Conference on Micro Electro Mechanical Systems.Las Vegas:IEEE,2002:324-327.
[3]Hyoungho Ko,Dong-il“Dan”Cho.Highly Programmable Temperature Compensated Readout Circuit for Capacitive Microaccelerometer[J].Sensors and Actuators A:Physical,2010(158):72-83.
[4]Lee K,Takao H,Sawada K,et al.A Three-Axis Accelerometer for High Temperatures with Low Temperature Dependence Using a Constant Temperature Control of SOI Piezoresistors[C]//Proc.of the Sixteenth Annual International Conference on Micro Electro Mechanical Systems.Kyoto:IEEE,2003:478-481.
[5]李童杰,刘云峰,董景新,等.微加速度计温度特性及敏感元件自恒温方案[J].清华大学学报(自然科学版),2010,50(7):1013-1017.
[6]Mackley J,Nahavandi Saeid.Active Temperature Compensation for an Accelerometer Based Angle Measuring Device[C]//MO.Jamshidi,Matheius Reuter,Diego Andina,eds.Proc.of the Sixth Biannual World Automation Congress(WAC).Seville:TSI,2004:383-388.
[7]张宇飞,屈建龙,宋超,等.石英挠性加速度计温度建模和补偿[J].中国惯性技术学报,2009,17(3):356-359.
[8]翁海娜,胡小毛,裴志,等.一种新的加速度计温度误差补偿方法[J].中国惯性技术学报,2009,17(4):479-482.
[9]张霄,房建成,李建利,等.一种隐式结构MIMU设计及标度因数温度误差分析[J].中国惯性技术学报,2008,16(6):665-671.
[10]刘攀龙,王国松.石英挠性加速度计的温度补偿研究[J].弹箭与制导学报,2010,30(5):233-234,240.
[11]张丽杰,常佶.小型飞行器MEMS姿态测量系统[J].振动测试与诊断,2010,30(6):698-702.
[12]张鹏飞,王宇,龙兴武,等.加速度计温度补偿模型的研究[J].传感技术学报,2007,20(5):1012-1016.
[13]禄坡远,刘诗斌,刘昭元等.基于ADIS16354的姿态角传感器设计[J].传感技术学报,2010,23(2):192-195.
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
中国特种设备安全(2021年5期)2021-11-06 05:09:08
现代机械(2021年3期)2021-07-12 00:47:42
应用数学(2020年2期)2020-06-24 06:02:40
客车技术与研究(2019年5期)2019-10-24 02:22:44
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
电测与仪表(2015年18期)2015-04-12 00:45:28
电子设计工程(2015年3期)2015-02-27 12:03:53
决策与信息(2014年21期)2014-12-13 01:50:10