
基于双目立体视觉的手持式光笔三坐标测量系统*
2011-09-26 09:31:06秦大辉刘建军
制造技术与机床 2011年8期
秦大辉 毛 婷 刘建军
(西南石油大学土木工程与建筑学院,四川成都610500)
物体点三坐标测量技术在现代工业生产中有着重要的基础作用,测量方式一般分为接触式与非接触式两种。传统的接触式三坐标测量机测量精度很高,但价格昂贵,且对实验室环境要求高,不能实现工业现场测量。非接触式如结构光测量系统[1],能够快速获取大量点云,但是没有办法获取单个特征点的三维坐标,更不能测量深孔等遮光部分的三维坐标。关节臂在局部范围内测量的柔性相对较高,但是柔性关节臂机械结构复杂,造价昂贵。视觉坐标测量是近年来测量领域中的新测量技术[2],可以实现工业现场测量,且能够和结构光组合起来从而对物体实现全方位测量。
国内学者对手持式视觉坐标测量技术进行了深入的研究,取得了优秀的成果。张之江提出了一种利用单相机测量系统,但是存在局限性,如精度低、只能测距、不能得出被测点的三维坐标[3-4]。黄风山博士提出了一种单相机的手持式视觉测量模型,论证了单摄像机光笔测量系统能够测量空间三维坐标,并且研制出了样机[5]。但是,其模型要求手持式光笔标志点严格在一条直线上,增加了加工难度,同时不可避免地会带来一些误差。青岛大学解则晓提出了一种双目光笔测量模型[6],但是仍然要求光笔上面粘贴的标志点严格在一条直线上,同样存在加工难度大、精度难以保证等缺点。
综上所述,本文提出了一种简单的手持式光笔三坐标测量系统,以带有回光反射点的光笔作为手持式接触测量工具,利用固定在支架上的两个CCD相机组成的双目立体视觉系统作为视觉测量手段。本系统对标志点在光笔上的分布没有特殊要求,具有柔性大、携带方便、结构光简洁、加工及安装简单等优点。
1 系统组成及工作原理
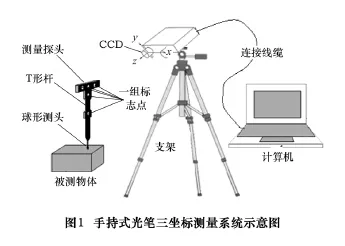
系统组成如图1所示。该系统的整个结构主要包括2台参数相同的面阵CCD摄像机,用于固定2台相机的固定板和三角支架,1只手持式光笔接触测量T形杆(T形杆的正面粘贴有5个回光反射点)和1台运行配套测量软件的笔记本电脑。
手持式光笔的设计是本测量系统设计的关键,经过试验、研究,确定光笔结构如图2所示。光笔上面的发光标志,多采用 LED[5-6]。LED 因其光源的各种优异特性在机器视觉中获得普遍应用,但是,LED光源昂贵,如要安装在光笔上则需要对光笔进行复杂的加工及安装。回光反射标志点(Retro-reflective tagrgets(retro-targets)),是西欧和北美等技术发达国家近年来在实施高精度工业摄影测量和特种摄影测量时,粘贴在被测物体表面上的一种辅助人工标志[7]。它能够反射的亮度较普通打印的漫反射白色标志点的反射亮度高出成百上千倍,可以直接粘贴在光笔上,非常方便且价格便宜。因此,本文采用回光反射点作为光笔上的标志点,且标志点本身分布和标志点分布与测头位置都没有特殊要求。

在进行测量的时候,测头接触被测表面,摄像机摄取笔体上的回光反射标志点的图像,再经由图像采集卡对图像进行采集后送入计算机内存,再通过研发的软件进行图像处理得到各个标志点的像面坐标,并解算出被测面上测头接触点的三维坐标。
2 双目立体视觉系统的建立与标定
对两台摄像机组成的双目立体视觉系统进行标定是手持式坐标测量工作的首要步骤。立体视觉标定就是两台摄像机的内部参数和相对位置。完成标定之后,可通过双目立体视觉系统模型,得到图像上同名点的空间三维坐标。在标定前,要先建立摄像机的模型。
2.1 基于中心投影的小孔成像模型
基于中心投影的小孔成像模型是机器视觉精确测量中普遍采用的相机模型。一个三维空间点通过点透视投影到图像平面得到像点坐标,其定义为:
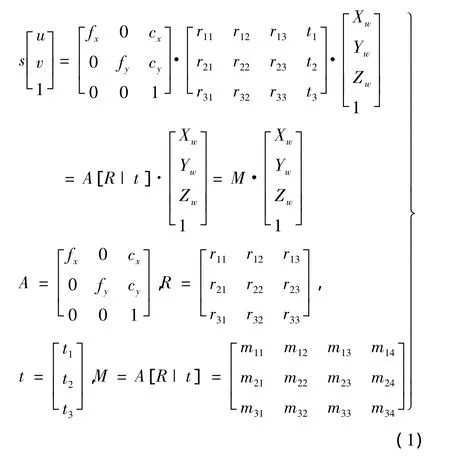
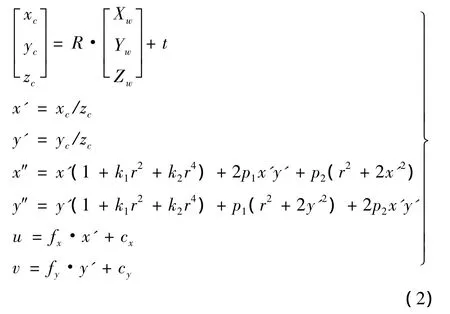
式中:(Xw,Yw,Zw)是1 个三维点的世界坐标;(u,v)是点在图像平面的投影坐标,以像素为单位;A称为相机的内参数矩阵;(cx,cy)是主点坐标;fx和fy是以像素为单位的在水平和竖直方向的有效焦距。镜头都会存在一些畸变,主要有径向畸变和切向畸变,因此,需要对模型加以修正。
2.2 相机标定与双目立体视觉三维空间点坐标求取
在建立相机模型后,对组成双目立体视觉系统的相机进行标定。在机器视觉测量领域,标定技术已经成熟,主要以Tsai的两步法[8]和张正友的平面标定法[9]为代表。张正友的平面标定法,不需要三维标定物,柔性大。本文直接采用张正友的标定方法来对相机进行标定。在标定出相机的内部和外部参数后,设一对左右图像的对应点,都可以代入公式(1),从而得到两对方程组,进行化简后,可以得到
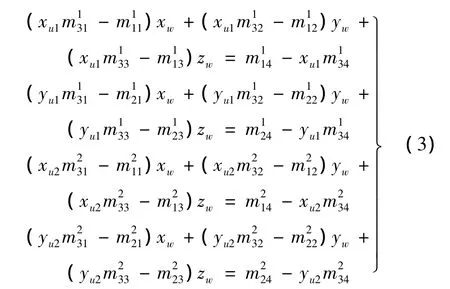
公式(3)中包含有3个未知数,由4个方程组成,因此可以通过最小二乘求得被测点的三维空间坐标。
3 光笔测量系统原理
本文设计的光笔测量系统在工作时,首先根据双目立体视觉原理求取光笔上粘贴标志点的三维坐标,再根据光笔的结构参数来解算出被测点的空间坐标。
3.1 光笔标志点标定
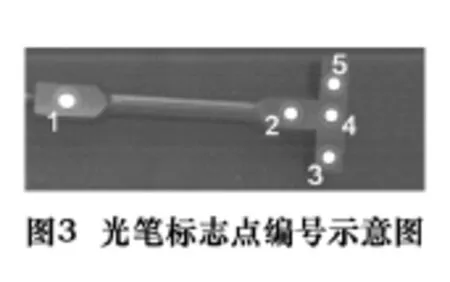
因为光笔上标志点是平面标志物,因此无法通过传统的机械三坐标来获得其在光笔坐标系下面的坐标,也不能依靠机械加工中的定位来粘贴标志点从而获得标志点的三维坐标,因为不容易控制误差,而本系统作为测量设备精度要求较高。为此本文采用摄影测量中非常成熟且精度高的光束法平差[10]技术来对光笔标志点进行标定,从而得到光笔上面的5个标志点的三维空间坐标,从点1到点5三维 坐 标 分 别 为: (4.841,4 9.993,7.831),(-1.436,-33.427,19.999),(-20.464,-49.013,22.296),(-2.548,-50.330,22.463),(10.869,-51.655,22.533)。
3.2 光笔测头中心位置自标定算法
求解光笔测头在有光束法平差标定光笔标志点所建立的光笔坐标系下的坐标这一过程称为光笔测头位置自标定。本文提出了基于位置不变原理的多姿态光笔测头位置自标定算法。
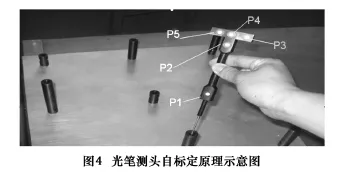
如图4所示,把光笔放置在同一个圆锥孔内,随意倾斜角度,采集光笔n个不同姿态下的图像,通过双目立体视觉测量算法,就可以获得n组光笔标志点在摄像机坐标系下的三维坐标:{Pc1(xic1,yic1,zic1),Pc2(xic2,yic2,zic2),Pc3(xic3,yic3,zic3),Pc4(xic4,yic4,zic4),Pc5(xic5,yic5,zic5)},i=1,2,…,n -1,n。其中每组都包含了全部5个标志点的三维坐标。
通过前述的光笔标志点标定算法,此前也已经获得了光笔5个标志点在光笔坐标系下面的三维空间坐标:{Pg1(xg1,yg1,zg1),Pg2(xg2,yg2,zg2),Pg3(xg3,yg3,zg3),Pg4(xg4,yg4,zg4),Pg5(xg5,yg5,zg5)},此时标志点在不同坐标系下的关系,可以通过刚体变换用公式(4)来联系。
可利用SVD来解算出公式(4)中的Ri与 Ti[11]。设光笔球形测头中心在光笔坐标系的坐标为Pg=[xgp,ygp,zgp]T,在摄像机坐标系的坐标为 Pc=[xgc,ygc,zgc]T,则同样可以根据公式(4)建立的两个坐标系的刚体变化关系,可以得到下面方程组:

式(5)中,方程两两相减到一个新的方程组:

由于方程组(6)是个线性方程组,未知数为3个,因此只要n≥2即可解算出Pg。为了增加稳定性和可靠性,本文左右两CCD摄像机拍摄至少6组共12幅图像,通过最小二乘法来求解光笔球形测头在光笔坐标系的坐标Pg。标定Pg后,在实际测量中,即可由PgR+T=Pc,求出被测物体点的三维坐标。从而实现了基于双目立体视觉的手持式光笔的接触式测量。
4 光笔测量系统精度评估
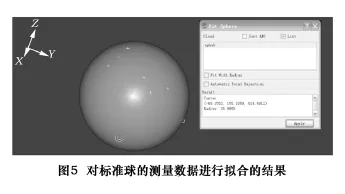
为了评价光笔的测量精度,使用光笔对一个已知半径为25.402 mm的标准陶瓷球进行了测量,为了得到可靠的拟合结果,本文采用具有工业标准的Imagewear.软件来进行测量点的拟合,拟合出来的结果如图5所示。通过拟合测量点,得出拟合球的直径为:25.486 5 mm,相比较陶瓷球的标准直径25.402 mm,具有0.084 mm的偏差。对同一个测量球进行100次的测量,测量结果的标准偏差为0.018 mm。通过对如图4的标定板上面的圆柱间的距离进行测量,在226.274 mm的标称距离上,测量的结果是226.192 mm。其偏差为0.082 mm。对同样的位置距离进行100次测量,测量结果的标准偏差为:0.021 mm。结果表明测量系统具有良好的稳定性和可靠性。
5 结语
本文提出了一种以粘贴回光反射标志点的手持式光笔作为接触式测量工具,基于双目立体视觉系统的手持式光笔三坐标测量系统。它具有操作简单,结构简单的特点,手持式光笔在结构上对测头和标志点的分布没有特殊要求,降低了光笔的结构复杂度,减少了误差源,提高了测量精度。通过实验证明,本系统稳定可靠,可以作为非常接触式结构光测量的有力补充。
[1]QIN Dahui,LI Zhongwei,WANG Congjun,et al.3 - D shape measurement of complex objects by combining color-coded fringe and neural networks[J].Tsinghua Science and Technology,2009,14(S1):66 -70.
[2]Hocken R H J,Hocken R J.Coordinate measuring machines and systems[M].Second Edition.Taylor and Francis,2010.
[3]张之江,车仁生,黄庆成,等.单摄像机测头成像视觉坐标测量系统建模[J].仪器仪表学报,1999(5):59-62.
[4]张之江,车仁生,黄庆成,等.测头成像视觉坐标测量系统中特征点成像中心获取[J].光学精密工程,1998(5):14-20.
[5]黄风山,钱惠芬.光笔式单摄像机三维坐标视觉测量系统建模[J].光电子.激光,2007(1):85-88.
[6]解则晓,金明,辛悦向.基于双目立体视觉的光笔式三坐标测量系统[J].中国机械工程,2008(8):896-899.
[7]Luhmann T,Robson S,Kyle S,et al.Close range photogrammetry:principles,techniques and applications[M].Hoboken,New Jersey:John Wiley & Sons,Inc.,2007.
[8]Tsai R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Jouranl of Robotics and Automation,1987,3(4):323 -344.
[9]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactionson Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[10]Luhmann T,Robson S,Kyle S,et al.Close range photogrammetry:principles,techniques and applications[M].Hoboken,New Jersey:John Wiley & Sons,Inc.,2006.
[11]秦大辉,王从军,史玉升,等.4轴3D激光测量系统中旋转工作台参数标定[J].华中科技大学学报:自然科学版,2009(6):129-132.
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
中国交通信息化(2022年2期)2022-04-26 13:49:52
电子制作(2019年20期)2019-12-04 03:51:38
电子制作(2019年19期)2019-11-23 08:41:38
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
现代计算机(2016年11期)2016-02-28 18:35:20
广西科技大学学报(2015年4期)2015-02-27 12:22:28
计算机工程与设计(2014年9期)2014-12-23 01:16:00
自动化博览(2014年4期)2014-02-28 22:31:13
