
船用海水自动采样系统的软件设计
2011-09-24 03:27司惠民王项南李力平
海洋技术学报 2011年1期
司惠民,王项南,李 超,李力平
(国家海洋技术中心,天津 300112)
船用海水自动采样系统的软件设计
司惠民,王项南,李 超,李力平
(国家海洋技术中心,天津 300112)
文中介绍了船用海水自动采样系统的控制系统。以PLC为控制核心,搭配合适的硬件模块,根据系统功能要求编写软件,利用PLC与PC的无协议通信和触摸屏的远程界面功能,最终实现海水多层取样的全自动化和远程控制,缩短水样的采集和预处理时间。实验表明该系统工作稳定可靠,操作方便。
采样;自动化;分配;系统;PLC
海洋监测主要有两种方法,一是直接将传感器放入海水中进行测量;二是将海水采样,到实验室中使用仪器进行分析测量。目前还有许多不能用传感器测量的环境参数,例如营养盐、痕量金属、痕量有机污染物,它们还只能用取样分析的方法[1]。目前广泛使用的采水装置为尼斯金采样瓶(Niskin bottle)和CTD电控多瓶采水装置,但尼斯金采样瓶所系钢丝绳受海流影响的倾斜是无法控制的,并且挂解采水瓶和操作击锤比较繁琐和耗时;CTD采水则取样量较小,且金属框架容易影响水样的真实性。
本文研究的水样采集与分配系统(简称采样系统)可以全自动抽取指定深度海水样品并通过管道全程封闭输送,能最大限度地保持海水样品的理化生物学性质,相对于传统的各检测设备使用采水器取水方式,减轻了实验人员劳动强度,缩短了水样采集和预处理时间,保证分析数据的实效性,也有效地控制了采样过程中的二次污染,提高各分析仪器所测水样的真实性[2]。
在“十五”863课题“船载海洋生态环境现场监测集成示范系统”研究成果的基础上,对水样采集与分配系统的工艺流程和设备材料进行了改进完善。另一方面,重新编写了软件,使控制系统可靠性更高,操作更灵活方便,界面更简明。
1 船舶平台
“向阳红8号”环境监测船排水量608 t,船上有干实验室、湿实验室、后置实验室等多个实验室和完善的生活设施,非常适合近海连续监测。以此船为平台的监测系统,包括了10种海洋环境监测设备:流动注射法海水营养盐自动分析仪、非连续光度法海水营养盐自动分析仪、臭氧法海水COD自动分析仪、平衡法海水BOD自动分析仪、海水重金属元素自动分析仪、海水挥发酚和CDOM自动分析仪、赤潮生物综合测量分析系统、海水总磷与总氮快速测定仪、海水有机锡快速测定仪、海水总有机碳快速测定仪等。并备有4个仪器柜,作为扩展其它监测仪器的准备。
采样系统由取水与分配系统、布放回收装置和电控系统三部分组成。整体框架如图1。
2 控制系统硬件组成
整个控制系统以可编程逻辑控制器 (PLC)FX2N-64MR为核心,搭配模数转换模块FX2N-4AD和通信板FX2N-232BD,水样分配室的电控箱配备1台10.4寸触摸屏作为主监控界面,甲板绞车电控箱上配备1台5.7寸触摸屏作为分监控界面,如图2所示。

图2 控制系统框架图
压力传感器装于采样头上,与取水口深度一致,压力数据经模数转换后送入PLC计算出采样头实时深度;液位开关则指示各水样罐的液位状况。PLC根据输入信号和主控平台命令,经内置逻辑程序判断,输出I/O信号控制绞车、电磁阀、水泵和纯水机。PLC与主控平台通过232网络通讯,与触摸屏通过485网络构成“一机双屏”系统。主触摸屏接入局域网,局域网上任一终端都可以进行远程监控。

图1 整体系统框图
3 软件设计
3.1 软件流程
控制系统的软件工作流程如图3所示。
3.2 功能设计
软件采用模块化编写,根据系统功能要求,分为9个模块。主要模块及其功能如下:
3.2.1 初始化
初始化是保证系统正常运行的基础,每次系统上电运行1次。初始化不成功,则不能运行其他程序,且在触摸屏上显示提示。
初始化时要将输出端子关闭,使电磁阀、泵和绞车等处于停止状态,以保证系统设备和人员安全。另外,还要对一些特殊寄存器进行写入,如设置RS指令的数据传送格式符合通信协议要求、将模数转换模块的工作方式设置写入存储器等。
3.2.2 深度读取及判断
由于要在预设深度取水,对采样头实时深度的测量十分关键。受海上环境影响,压力测量信号会产生大幅波动,读取程序要能抑制扰动并使采集的数据更接近真实值。读取深度数据后,要与预设取水深度进行比较,以判断应该采水还是运行绞车以调整采样头位置。
3.2.3 自动/半自动控制
自动/半自动控制是主程序,根据预设逻辑和输入调用各功能子程序,完成一个站位的工作流程。
3.2.4 手动控制
为了应对非正常状况下工作的情况,设置手动工作方式,使用绞车面板上旋钮直接控制绞车、水泵等。
3.2.5 清洗水样罐及管道
为防止管道出现霉斑,要定期清洗管道,系统长时间不用的时候,要将管道中充满纯水以隔绝空气。一般每个航次结束时清洗管道并充满纯水。
3.2.6 时钟调整
PLC内置实时时钟,由内置锂电池维持运行。与主控平台通信的采水完毕消息中用的是这个时钟的时间,要能对时钟进行校正。
3.2.7 急停
系统在运行期间如遇紧急情况可以按下电控箱上的急停开关暂停工作,当故障排除后旋出急停开关,仍可从原程序断点处继续运行[3]。
3.2.8 纯水控制
为满足设备对纯水的需求,纯水罐上安装了高低两个液位开关,纯水水位过低时要自动开启纯水机制备纯水,到达液位上限时停止工作。
3.2.9 通信
采样系统作为监测系统的一部分,与主控平台的通信十分重要,不但要接受指令,还要能报告工作状态。
3.3 PLC软件设计
PLC软件利用三菱可编程控制器的编程软件GX Developer,以最常见的梯形图形式编写[4]。具体程序略去,下面就其中一些问题进行讨论。
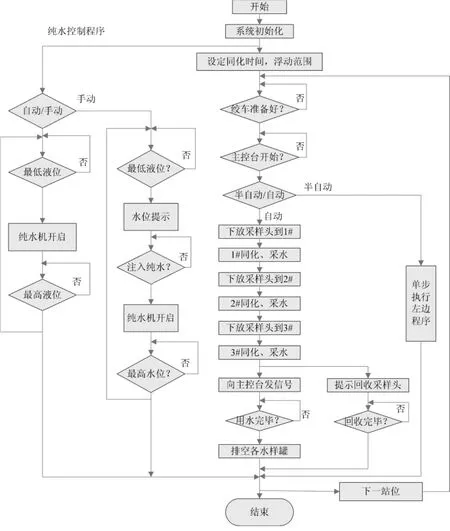
图3 软件工作流程图
3.3.1 深度的读取判断
选用的传感器量程为0~100 m,测量精度为0.1 m。每20个测量数据取平均值,降低信号波动产生的影响,使测量值更加接近于真实值。深度数据每0.3 s刷新一次,由于绞车速度较低(一般0.2~0.3 m/s,最大0.6 m/s),这样的测量频率已经能够满足要求。
考虑到海上的现场环境,不能直接用预设深度和实时深度进行数值比较,而是用了区间比较指令EZCP。根据浮动范围d和预设深度A产生一个区间[A-d,A+d],只要实时深度位于这个区间内,就开始采水程序。浮动范围d可以根据环境状况在触摸屏上设定。如果A-d小于0,则自动替换A-d为0.3。
下放采样头时,根据深度的区间比较指令结果,系统指挥绞车进行放缆或收缆,直到实时深度位于采样区间内。这样避免了以前只能先采表层再采深层水的问题,可以使采样精度进一步提高,也可以先采集深层水再采集表层水,操作自由度更大。
3.3.2 时钟调整
时钟调整有两种方法,一是在触摸屏的时钟调整界面,二是通过主控平台的校时指令。两种方式都是在指定寄存器中写入预设数值,然后使用TWR指令写入PLC。
3.3.3 电源保护
为了有效保护电源,电磁阀和水泵都采取了延时开启以避免同时开启导致的冲击电流过大。当需要同时打开多个电磁阀时,每间隔1 s打开一个;水泵的间隔时间则为3 s。
3.3.4 通信设计
PLC与主控平台的通信使用标准的RS-232C串行接口协议进行传输[5]。串口通讯设置为波特率9 600 bps、8位数据位、1位停止位、无校验位。发送的数据采用ASCII码值为交换码的字符串形式。通信以消息字符串开头,以一个空格为字符串分隔符,最后添加指令校验码,消息结束标志为回车换行( )。
由于采用ASCII码传输数据,为了不使校验码出现乱码或控制码,在计算校验码时,只计算数字,其他字符按零处理。校验码标识c以前的所有数字逐个相加,溢出忽略,结果还是一位数字。在程序中,我们使用FOR-NEXT循环,将指令中所有字符逐一进行判断,ASCII码位于H30~H39区间的,减30后相加,再将结果只取个位即得校验码。
PLC与主控平台通信的指令有5条,分为两种方式:一是PLC发送,主控平台应答;二是主控平台发送,PLC应答。由于应答码格式一致,仅在指令ID和状态码上有区别,为了简化消息处理,使用了两条RS指令,由一个状态位S12控制。当需要发送水样采集结束消息时,将S12置于导通,第一条RS指令有效,与主控平台通信。待通信成功,接收到正确的应答后,将S12复位,第二条RS指令有效,接收主控平台发送的指令并处理。
S12保持常开,处于等待接收状态。接收到主控平台指令后首先判断开始字符串start,若正确则根据消息ID判断是哪条指令然后转入相应处理程序。由于开始时间和用水结束时间不确定,一直处于等待接收的状态,就可以实现由主控平台发送命令来控制采样系统的工作。
3.4 触摸屏界面及其远程监控功能
触摸屏界面采用简单易用、功能强大的组态软件EasyBuilder8000进行编写。主要有自动、手动、参数设置、纯水控制、清洗管道、记录查询、操作说明等数个界面。
主触摸屏选用台湾威纶公司的MT8104XH,具有VNC server功能。接入局域网后,为其分配一IP地址,在接入该局域网的任何PC上访问该地址,出现VNC登陆对话框,输入正确的密码之后,就能对触摸屏进行完全的监视和控制(图 4)。

图4 触摸屏的远程监控示例
这样,结合PLC与主控平台的通信功能,基本实现了水样分配室的无人值守。在自动模式下,主控平台通过串行通信发出开始工作指令,采样系统自动工作,收到用水结束指令时,排空水样,完成一个站位的工作。同化时间的设定和通信错误的处理等事件可以通过对触摸屏的远程监控完成。另外,水样分配室还装有监控摄像头,可以从主控室监视突发事件。只需要一个人在甲板上照看绞车,准备就绪时,按下绞车电控箱触摸屏上的“准备完毕”,采样结束后按下“收缆”以回收采样头即可。
4 调试与实验
在实验室使用GX Simulator对PLC程序进行模拟仿真后,写入PLC进行调试。在PC端,用Visual Basic6.0编写了串口通信调试程序,模拟主控平台与PLC进行通信[6]。经实验,该系统完全能够达到预期要求,可以实现远程、自动化控制。
2010年8月该系统随“向阳红8号”在胶州湾进行了岸边调试和11个站位的海上试验,工作情况良好,操作方便、稳定性高、运行可靠,与主控平台的通讯也很稳定,达到了系统要求。
5 结束语
本文主要研究了基于PLC和触摸屏的船用海水自动采样控制系统,具有自动化程度高、性能稳定、维护方便、简单易用等优点;本系统是船载海洋环境监测系统的重要部分,对提高海水取样的效率有巨大作用,装备了本系统后,“向阳红8号”监测船具有业务化运行的能力,基本可以做到每小时一个站位的连续监测;本系统在海洋环境监测中具有良好的应用前景,相信可以对我国的海洋环境监测事业起到推进作用。
[1]朱光文.海洋监测技术的国内外现状及发展趋势[J].气象水文海洋仪器,1997,2:1-14.
[2]宋铭航,张静.船用海水样品自动采集、预处理与分配系统研究[J].海洋技术,2004,23(2):14-18.
[3]刘振全,王汉芝.触摸屏与PLC在海水淡化控制系统中的应用[J].自动化仪表,2007,28(5):36-39.
[4] 谭威.基于PLC的工业控制系统的设计与实现[D].武汉:华中科技大学,2007.
[5]朱静.基于 PLC 的矿井水泵自动控制系统[J].煤矿机械,2009,30(7):121-122.
[6]谈士力,张海洪,冯星华.基于VB的PLC与微机通讯及其应用[J].系统工程与电子技术,2001,23(3):91-94.
Abstract:The control system of shipborne seawater automatic sampling system is introduced,which has PLC as its controller with some appropriate hardware module.The software is programmed according to the requirements.Making use of the VNC server function and the no protocol communication between PLC and PC,the automatic and remote control of seawater multilayer sampling to reduce time of sampling and pretreatment is achieved.This system worked steadily,reliably and operationally in experimentation.
Key words:sampling;automatic;distributing;system;PLC
Software Design of Shipborne Seawater Automatic Sampling System
SI Hui-min,WANG Xiang-nan,LI Chao,LI Li-ping
(National Ocean Technology Center,Tianjin 300112,China)
P71
B
1003-2029(2011)01-0015-05
2010-11-02
国家高技术研究发展(863)计划资助项目(2007AA09210112)、(2007AA092001-8)。
猜你喜欢
机电信息(2020年30期)2020-11-10
科技风(2020年17期)2020-07-04
装备制造技术(2019年12期)2019-12-25
科学导报·科学工程与电力(2019年44期)2019-09-10
水利水电快报(2019年10期)2019-09-10
知识就是力量(2018年7期)2018-07-11
同煤科技(2015年4期)2015-08-21
河南科技(2014年24期)2014-02-27
河南科技(2014年12期)2014-02-27
河南科技(2014年12期)2014-02-27
