
民用飞机地面模拟试验气动力模拟系统的原理性估算
2011-09-22 05:35:12戴烨飞
长沙航空职业技术学院学报 2011年3期
戴烨飞
(上海飞机设计研究院,上海 200000)
民用飞机在进行飞行试验之前,要先进行地面模拟试验。国内外,各飞机制造商的地面模拟试验主要通过铁鸟进行。铁鸟一般是由真实的飞控、起落架、液压、电源等系统集合而成的综合试验平台。
气动力模拟系统,又称舵面加载系统或铰链力矩模拟器,它是铁鸟试验平台上为飞控系统作动系统提供模拟气动力或铰链力矩的试验设备,是强位置耦合的力伺服系统,铁鸟试验中半物理仿真的重要试验设备。[1]
1 基本原理
同普遍的伺服系统一样,气动力模拟系统根据供能方式的不同,可以分为电动方式的气动力模拟系统和电液方式的气动力模拟系统,前者一般具有响应速度快,参数稳定,体积小,成本低等优点,而后者则具有较宽的频带、较大的输出力等优点。由于飞机所受的气动力较大,铁鸟上的气动力模拟系统多采用电液气动力模拟系统。[2]
电液气动力模拟系统的基本原理如图1所示。控制器根据输入的指令信号、反馈的力传感器和位移传感器信号,解算出控制电液伺服阀的电压信号。电液伺服阀根据信号控制流入作动筒的液压油,从而控制系统输出力。

图1 电液气动力模拟系统基本原理简图
2 设计指标的估算
一般在伺服系统设计之前,需要确定系统应该具有何种性能,也就是要确定系统的性能指标,即系统的设计输入。气动力模拟系统的性能指标主要来自于飞机的作动系统和舵面,即舵面的质量、惯量、偏转精度、行程、偏转速率以及随舵面偏转的气动力模拟系统设计的输入。[3]
气动力模拟系统的设计指标一般包括输出力范围、行程、精度、频率响应等。输出力范围根据飞机舵面在空中所受到的气动载荷而定,但是考虑传感器的线性度和系统的裕量,一般系统设计时在舵面所受气动载荷的基础上再增加20%-30%的余量。
行程主要是指作动筒的正反两个方向运动的位移总量。它与舵面的偏角范围和作动器的安装位置有关,同时在设计时也要考虑留有一定的余量。
系统精度包括静态精度和动态精度。静态精度主要取决于飞机舵面偏转的精度,根据一般工程估算的原则,气动力模拟系统的精度应该比飞机舵面偏转精度高5-10倍。动态精度主要是指系统能够克服多余力的能力。在气动力模拟系统加载过程中,由于系统随着舵面的运动而运动,从而产生由位置干扰而引起的多余力。多余力的存在对系统的输出力有很大的影响,因此在系统设计中要尽量克服多余力,一般要求多余力小于3% -5%。
频率响应也就是系统的带宽,通常是在总输入幅值5%-10%的输入信号下,系统输出幅值衰减3dB时的频率。一般试验设备的带宽应高于被测系统的5-8倍,也就是说气动力模拟系统的带宽应该是飞机作动系统带宽的5-8倍。[4]但是在实际上,由于电液伺服系统本身限制,不可能具有较大的带宽,一般气动力模拟系统的带宽在3-5Hz左右。
另外,在系统设计时,还需要考虑系统的分辨率、零位漂移等指标。
3 原理性估算
在确定了性能指标之后,就可以进行原理性估算了。原理性估算主要确定如何选择合适的执行机构、电液伺服阀。[5]这里以液压缸为执行机构的力伺服系统的原理性估算为例进行说明。
3.1 液压缸参数计算
某一型号飞机升降舵气动力模拟系统要求其行程为170mm,载荷为25000N,速度为200mm/s。根据要求的最大载荷25000N,考虑一定的余量,取气动力模拟系统所输出的最大力为35000N。一般飞机的液压系统的额定压力为21MPa,取气动力模拟系统的供油压力为21MPa。
由公式
求得液压缸内径D=46mm,查机械手册可取D=50mm。
根据工作压力选取液压缸往复速度比,ψ=2,由公式

求得活塞杆直径d=D/2=23mm,查机械手册可取d=28mm。
根据以上计算值,选取液压缸的长度。一般液压缸长度不应大于内径的20-30倍,同时,液压缸长度的选择也应考虑飞机控制面的行程、气动力模拟系统的安装位置等因素。
3.2 电液伺服阀选型
电液伺服阀的主要根据负载流量和额定阀压降下的流量曲线来选取。
伺服阀的负载流量可有以下公式计算而得(不考虑能量损失):

其中Qmax为最大负载流量,Vmax为液压缸活塞杆的最大运动速度。根据以上公式最后求得
Qmax=1347*200=269400=16.1 L/min。
根据以上计算所得的流量值,结合电液伺服阀的额定阀压降下的流量曲线选取合适的电液伺服阀。图2所示是穆格G761系统电液伺服阀,一般额定阀压降取7MPa,根据计算所得的最大负载流量,考虑一定的余量,可以选取最大负载流量为38L/min的G761-3004型伺服阀。
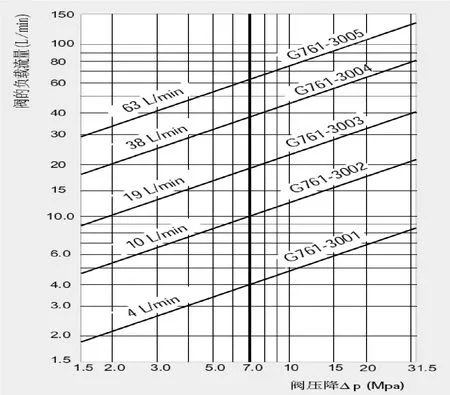
图2 G761系列流量曲线
4 结论
原理性估算主要是对气动力模拟系统的性能指标进行估算,为其部件选型提供依据。在原理性估算完成后,就可以依据选定的系统部件的参数进行详细数字仿真和计算,并设计气动力模拟系统的控制策略。控制策略的设计主要是消除气动力模拟系统在随飞机舵面运动过程中产生的干扰力,即多余力。消除多余力是气动力模拟系统设计中的关键,原理性估算则是系统设计的必要前提。
[1]张德发,叶胜利.飞行控制系统的地面与飞行试验[M].北京:国防工业出版社,2003.
[2]申安玉,申学仁,李云保.自动飞行控制系统[M].北京:国防工业出版社,2003.
[3]厉虹,杨黎明,艾红.伺服技术[M].北京:国防工业出版社,2008.
[4]王宗学.飞行器控制概论[M].北京:北京航空航天大学出版社,1994.
[5]杨勇.多自由度液压伺服系统的控制策略研究[D].长沙:中南大学,2006.
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:17:14
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
智富时代(2019年2期)2019-04-18 07:44:42
电子制作(2018年1期)2018-04-04 01:48:22
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
电子制作(2017年23期)2017-02-02 07:16:50
焊接(2015年1期)2015-07-18 11:07:32
飞行力学(2015年5期)2015-03-15 12:04:54
中国铁道科学(2014年1期)2014-06-21 06:34:16
