
舰机协同防空体系网络化效应分析
2011-09-02 06:23陈国生贾子英
指挥控制与仿真 2011年5期
陈国生,刘 钢,贾子英
(1.海军航空工程学院,山东 烟台 264001;2.国防科技大学,湖南 长沙 410073)
在高技术条件下的海上局部战争中,利用航空兵对舰艇编队实施空袭已成为主要的作战样式,随着其携带的空舰导弹和其他制导武器射程的不断增加,舰艇编队面临的空中威胁日益严峻。使用海军航空兵对舰艇编队进行空中掩护是应对此种形势的必然要求,这种掩护除了在防空火力上进行支援外,还能够提高舰艇编队的对空预警能力[1]。
随着计算机技术、网络技术、通信技术日益成熟,水面舰艇和航空兵这两种兵力可以依靠协同网络,实现信息共享,达成“高水平”协同作战,提高编队防空作战的整体效能。目前专家和学者研究偏向于防空武器系统组网理论[2-5],其重点是使得整个编队的防空火力资源合理组配,实现防空火力的优化使用,但却忽略了对组网后的防空武器系统网络化作战效应进行研究。基于此,本文对舰机协同防空体系网络化效应进行研究。
1 舰机协同组网的网络环模型
1.1 舰机协同组网的概念
为了研究舰艇编队与航空兵协同防空的网络化效应,提出舰机协同组网的概念。
舰机协同组网就是在水面舰艇编队指挥所的协同指挥控制下,以舰艇和航空兵的传感器提供的信息保障为基础,通过高度共享的信息,合理配置编队防空火力的部署,充分发挥航空兵的信息支援和火力掩护能力,完善舰艇和航空兵的火力配系,形成编队整体的协同作战态势,为编队所有防空资源的协同打击、协同制导等作战能力提供保障,从而提高编队整体的防空作战效能。
1.2 舰机协同组网网络结构的数学特性
舰机协同组网的网络结构具有确切的数学特性,这并不是一个新鲜的观点,主要有两个非常实际的原因。首先,我们可以用数学知识表示出不同网络结构完成相应作战任务具备的能力。其次,由于不同的网络结构自身有着新作战概念的诸多特性,如自适应、自同步、网络化效能和鲁棒性等,这些在网络科学中也有明确的数学定义。若一个网络化战斗模型忽略了网络数学特性,其将不可能恰当地描述一次作战行动的战斗过程。
1.3 舰机协同组网网络环模型的数学分析
正如1.2节内容所述,舰机协同组网的网络结构具有确切的数学特性,其结构基础是一个由链路连接节点的集合。在建立模型时,必须有一种可以区分不同类型的链路、节点及连接规则的分类法。
节点是作战过程的基本元素,主要包括传感器节点(S)、决策节点(D)、执行节点(I)、目标节点(T)四种类型[6-7]。
舰机协同组网的网络化效应主要依赖于节点与节点、节点与各组成要素及各要素通过各条链路的动态交互才能得以实现,而环是由链路与节点组成,并能反映节点与节点以及节点间各要素相互作用的特殊结构,它能体现火力协同组网的军事价值。因此环模型能较好体现其网络化效应。若其没有环,也就不会产生有用的网络化效应。
舰机协同组网的网络环模型具有数学特性,可以用“邻接矩阵”进行数学描述。如图1左边所示的网络可以等同于图右边所示的邻接矩阵。在图1中,决策节点D至目标T没有链路,而传感器节点S1至目标T之间则有一条链路。需要说明的是,邻接矩阵中的“1”表示从行节点(要素)至列节点(要素)之间有一条链路,“0”表示两个节点间没有链路(链路的方向都是由行指向列)。

图1 网络环模型及其邻接矩阵的对应关系
1.4 舰机协同组网网络化效应的数学度量参数
数学上,矩阵的特征值有着明确的意义,其反映了矩阵构成的性质。对于舰机协同组网的网络化模型而言,邻接矩阵可以用来计算该网络的各种参数及性能,特征值不仅能够反映网络连接的静态特性,它还可以反映网络的动态特性。由Perron-Frobenius定理可知:矩阵至少存在1个大于所有特征值、实的、非负特征值λPFE,叫做最大特征值。它反映了网络最大伸缩性,也就是网络的动态适应性。λPFE越大,则该网络的网络化效应越好。所以采用网络对应的邻接矩阵的λPFE作为度量其网络化效应具有一定的现实意义。
N×N邻接矩阵的λ的最大值为N,定义网络化效应系数 Ep来度量不同规模网络的网络化效应,其可以用下列公式进行计算[6-8]:

可以看出,Ep的取值范围从至1.0(对于PFE大于1.0)。
1.5 舰机协同组网的核心子网络
舰机协同组网网络环模型存在核心子网络,其最大优势在于其自适应性上。自适应性可以改变网络中动态结构的位置,也就是核心子网络的转移,它是伴随系统内某一要素状态的改变而发生相应的变化。在核心转移中,产生网络化效应的核心子网络可以从一种链路和节点的子集转移到另一种链路和节点的子集。也就是说,舰机协同组网的网络化效应是随着核心子网络的转移而有着不同的体现。对舰机协同组网网络化效应进行分析,必须将舰机协同防空区域进行划分,描述核心子网络在不同防空区域的转移,才能得出正确结论。
舰机协同防空区域可划分为协同预警区、航空兵火力拦截区、舰艇区域防空区、近程末端抗击区。在航空兵火力拦截区和舰艇区域防空区之间界定一个火力限制区,航空兵在火力限制区之内活动时,必须加强与区域防空舰艇的协同,以免被区域防空舰艇误伤。
2 实例验证
情况想定:航空兵派出一架预警机空中预警,其作为编队远程传感器节点S,两架歼击机空中掩护,作为编队远程防空拦截火力I1和I2;编队区域传感器节点为 S1,近程末端传感器节点为 S2;区域防空火力执行节点为I3和I4;近程防空执行节点为I5和I6;编队指挥控制节点为D;发现空中来袭目标为双机编队,分别为 T1和T2。
舰机协同防空区域划分如图2所示。
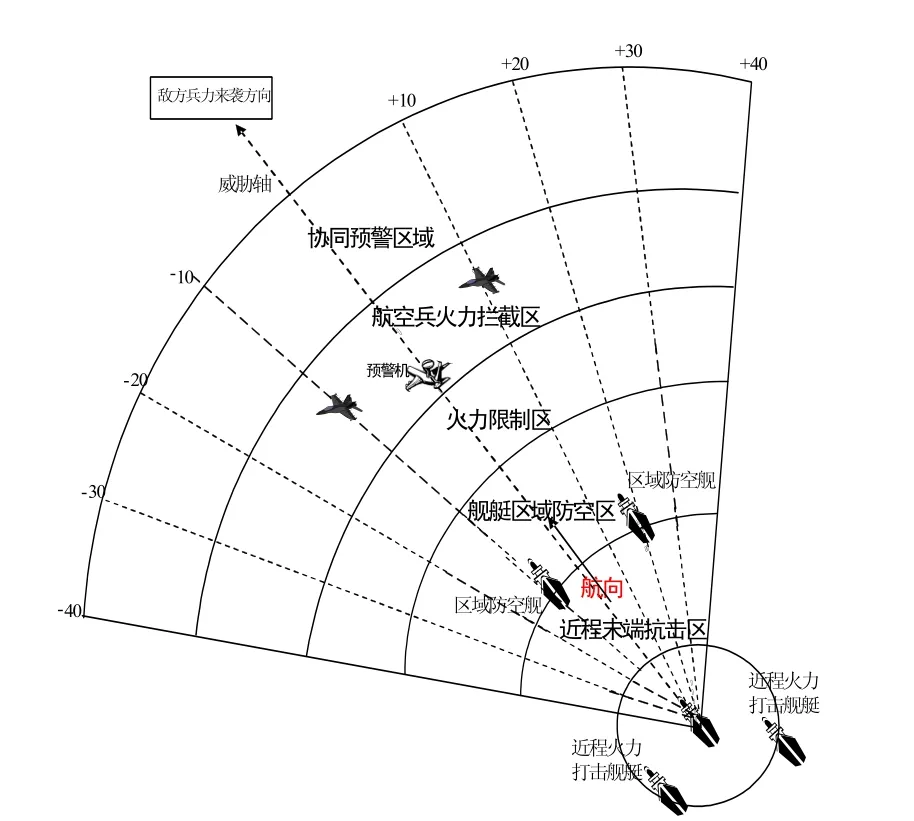
图2 舰机协同防空区域划分示意图
1)预警探测核心子网络的形成

2)航空兵火力拦截区的核心子网络
预警机发现目标后将目标信息发送给掩护歼击机 I1和 I2,并上报给编队指挥控制中心。指挥控制中心授权预警机引导歼击机对来袭目标进行拦截。区域防空舰艇加强对空侦察。此时核心子网络如图4所示(长方形框中部分),特征值为

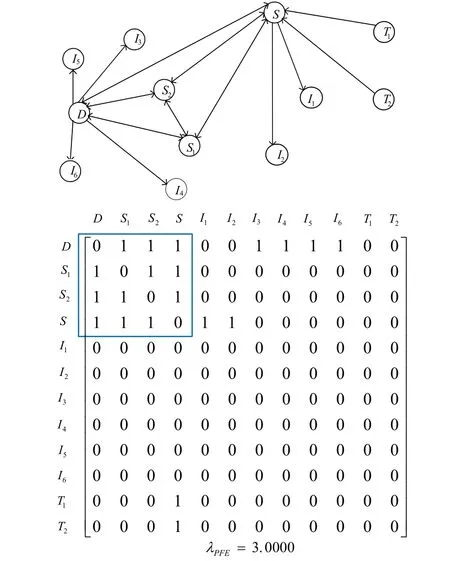
图3 预警探测核心子网络及邻接矩阵

图4 航空兵火力拦截区域核心子网络及邻接矩阵
3)舰艇区域防空区的核心子网络
假设来袭目标T1和T2突破掩护歼击机的拦截,进入区域防空舰艇拦截区,此时,核心子网络发生了变化。传感器节点S1对目标进行跟踪并将目标信息传递给区域防空执行节点I3和I4,决策节点D下达指控命令执行节点I3和I4对目标T1和T2进行打击,此时的核心子网络及邻接矩阵如图5所示(长方形框中部分),特征值为:

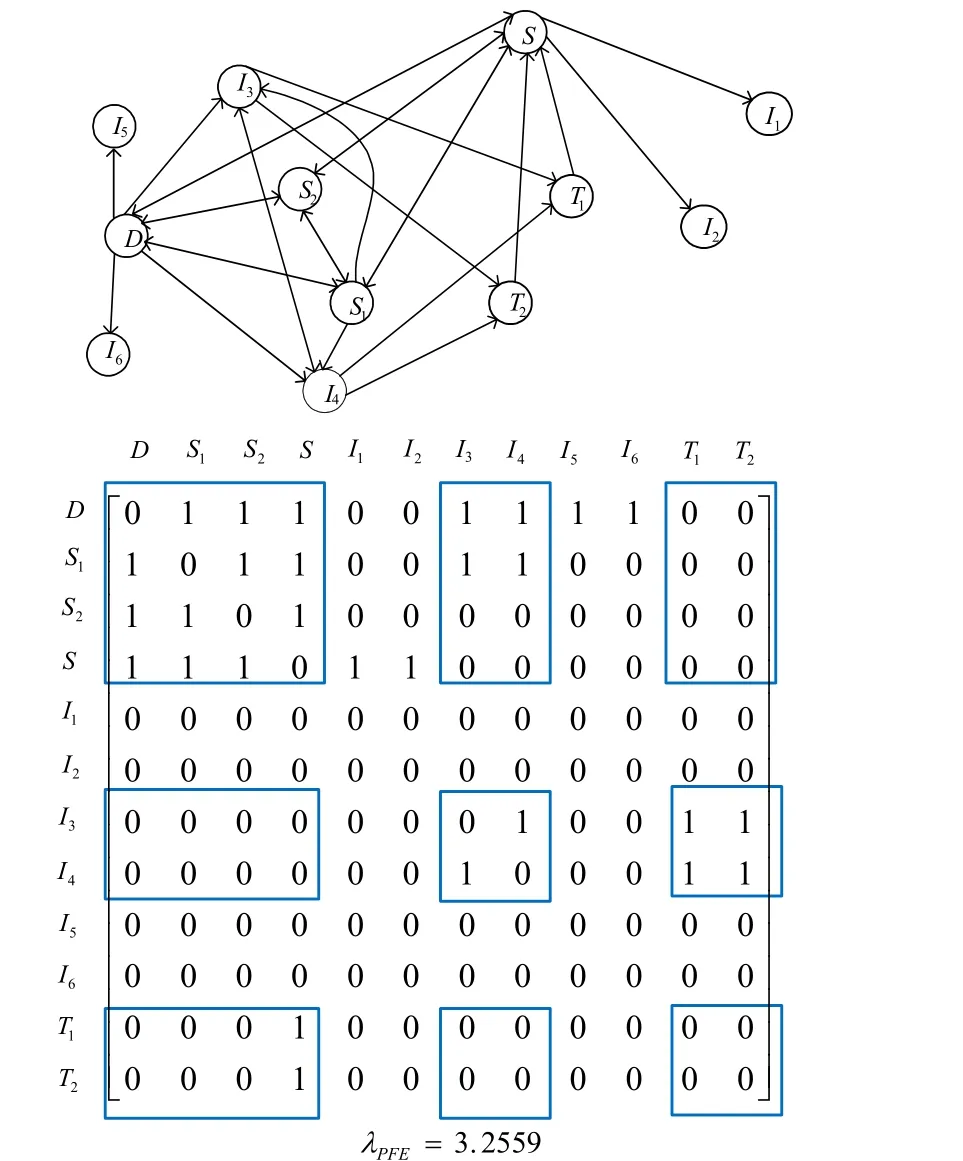
图5 舰艇区域防空区核心子网络及邻接矩阵
4)近程末端抗击区的核心子网络
若区域防空舰艇拦截失败,来袭目标进入编队近程末端舰艇防空火力的射程之内。在这样的作战态势下,编队的核心子网络再次发生转移。见图6所示(长方形框中部分)。特征值为
由网络化效应系数 Ep结果可以得出,舰机协同组网网络化效应在不同防空区域是不一样的,且航空兵火力拦截区域的网络化效应最大,舰艇区域防空区域的网络化效应次之,近程末端抗击区域的网络化效应最小;这恰好也说明在舰机协同防空体系中,航空兵火力拦截和舰艇区域防空的重要性及有效性,必须进一步加强舰机协同防空体系网络化的研究。
3 结束语
水面舰艇编队应对日益严峻的空中威胁,必须与航空兵空中掩护兵力互相配合、优势互补、有效协同,才能完成编队海上防空作战任务。基于Perron-Frobenius特征值的舰机协同组网网络环模型,可以有效地度量舰机协同防空体系的网络化效应。该分析方法思路简单,将其应用在舰机协同防空体系网络化效应分析是有效的。
[1]吴红星,叶志林,沈培华,等.舰机协同防空体系构建及效能[J].四川兵工学报,2008,29(6):96-98.
[2]韩松臣.导弹武器系统效能分析的随机理论方法[M].北京:国防工业出版社,2001.
[3]许金余.防空阵地网的理论及应用[M].西安:西北工业大学出版社,2005.
[4]陈立新.防空导弹网络化体系效能评估[M].北京:国防工业出版社,2007.
[5]陈永光,李修和.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006.
[6]于全.分布式网络化作战—网络中心战基础[M].北京:北京邮电大学出版社,2006.
[7]卜先锦.军事组织协同的建模与分析[M].北京:国防工业出版社,2008.
[8]李青,王瑜,宋明明.复杂环境下防空体系效能评估的网络环模型研究与应用[J].指挥控制与仿真,2009,31(4):59-62.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
理财·市场版(2022年5期)2022-05-30
政工学刊(2021年4期)2021-04-13
房地产导刊(2020年7期)2020-08-24
车迷(2018年12期)2018-07-26
军事运筹与系统工程(2017年4期)2017-08-29
火力与指挥控制(2017年3期)2017-04-24
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
声屏世界(2015年3期)2015-02-28
