
一种新的地面目标多特征关联方法
2011-08-13 03:26:12周新宇杨风暴吉琳娜
通信技术 2011年9期
周新宇, 杨风暴, 吉琳娜
0 引言
地面目标关联是地面目标融合的一个核心,也是最困难的一个部分。关联是为传感器当前观测在已有的目标之间进行分配:①已知目标延续点;②新目标;③虚警。目前的关联方法多是基于空中目标的,少有针对地面目标的。地面目标具有独特的运动特点[1],地面目标密度大,不易于区分目标;地面目标机动性强,很难利用单一模型准确地描述目标运动;目标行驶到道路交叉口时,不易判断目标是否发生转弯机动;地面目标易被遮拦很难获得连续观测。上述特点均为关联带来困难,地面目标特殊的运动特性和复杂的环境背景,使得关联问题并未得到很好的解决。
地面目标密度较大、目标相关波门交叉较多,最近邻数据关联(NNDA,Joint Probability Data Association)抗干扰能力差、易产生关联错误[2],概率数据关联(PDA,Probability Data Association)也仅适用于稀疏环境下的目标关联;而Bayes方法需知道先验概率,地面环境复杂性决定了分布类型与先验概率较难得到。联合概率数据关联(JPDA,Nearest Neighbor Data Association)在杂波环境中,虽然关联效果较好,但处理密集目标时,关联计算量随目标个数增加呈指数型增长,实时性较差[3-4]。因此,使用传统方法对地面目标进行关联,不能取得很好的效果。
灰色关联法根据序列曲线几何形状的相似程度来判断因素间的关联程度[5-6],不需要任何先验假设。传统的灰色关联法只把状态信息作为指标进行关联判断,事实上,传感器不只获得状态信息,还可获得有关属性特征的目标信息,忽略了属性信息导致关联信息量不足,关联错误率较高;而对各指标进行平均赋权,并不能反映各指标在关联中的客观权重。
1 目标特征指标的确定
传感器观测的地面目标信息分为2类:①状态信息,表征目标的运动情况,由位置、速度、方向、加速度组成;②属性信息,表征目标的身份特性。
位置信息是最为重要的状态信息。首先利用位置对目标进行粗关联,把一些不可能目标滤掉,设定一个较大的门限记为ε:

其中vmax为目标的最大运动速度,Δt为当前观测与已有目标的获取时间的差值,只有落入门限内的目标才有可能与当前观测关联。
速度表征目标运动的快慢;加速度表征目标的机动特性,由于地形的复杂性和地面目标的强机动性,因此加速度变化较为显著;受制于地面战场的地形,目标方向变化较为显著,而方向一定程度上决定了目标的运动,选取当前观测与已有目标在关联时刻的方向角之差的余弦值作为关联指标。上述4个特征均可作为状态指标用于关联。
属性信息为目标类型、敌我属性、威胁等级等,表征目标自身特性。目标类型表征目标的所属种类,目标的类型多种多样,敌我属性表征目标的战场归属,威胁等级表征目标在战场的杀伤能力。属性信息的观测值通常为枚举值,而枚举值不便于直接比较,因此应用多级模糊综合评判法[7],将其映射为区间 [0,1]上的值。
上述几个指标物理意义清晰,计算简单,且能够较好地抽象了目标的主要特征。
2 灰色关联模型建立
设目标库中粗关联成功的目标有m个,记为,各目标有n个特征指标,xij(j=1,2,…,n)为第i个目标中第j个指标。各指标物理意义不同,不便于比较,首先要进行无量纲化的数据处理,公式如下:

其中 maxxj、m inxj分别表示m个粗关联目标中第j个指标的最大值和最小值[8]。
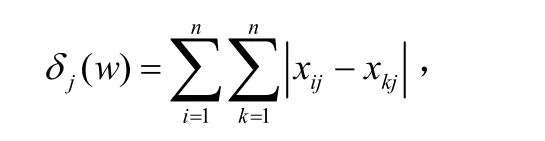
传统的平均赋权法不能真正体现指标间的差异,采用最大离差法确定指标的相对离散度权,若评价方案在指标j下的测量值差异越小, 则该指标在各方案的关联排序过程中起的作用越小,反之作用越大[9]。
δj(w)表示第j个指标下, 所有目标的总离差:
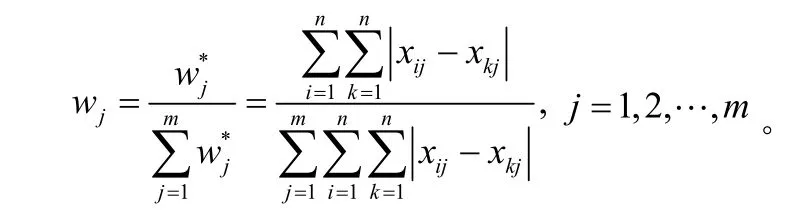
特征指标的权重应使所有指标的总离差取得最大值,求得各权值并进行归一化处理,得离散度权:
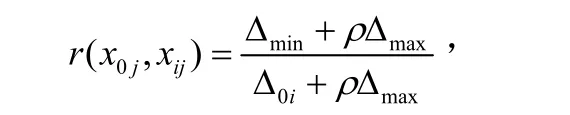
灰色关联度r(x0,xi)是参考序列x0与比较序列xi之间几何距离的一种度量。

按照灰色系统分辨原理,对关联度排序,若:

则判断认为当前观测x0与目标xk关联。
3 实例仿真
为验证算法的有效性,对建立的模型进行仿真分析,利用剧情模拟器对地面战场进行模拟,产生450个目标,将速度、加速度、方向测量值,目标类型、敌我属性、威胁等级作为灰色关联的指标,分别表示为θ1,θ2,θ3,θ4,θ5,θ6。
随机选取其中一批目标进行分析,传感器当前观测x0,与其粗关联的目标有4个,表示为X=(x1,x2,x3,x4),指标值如表1示。
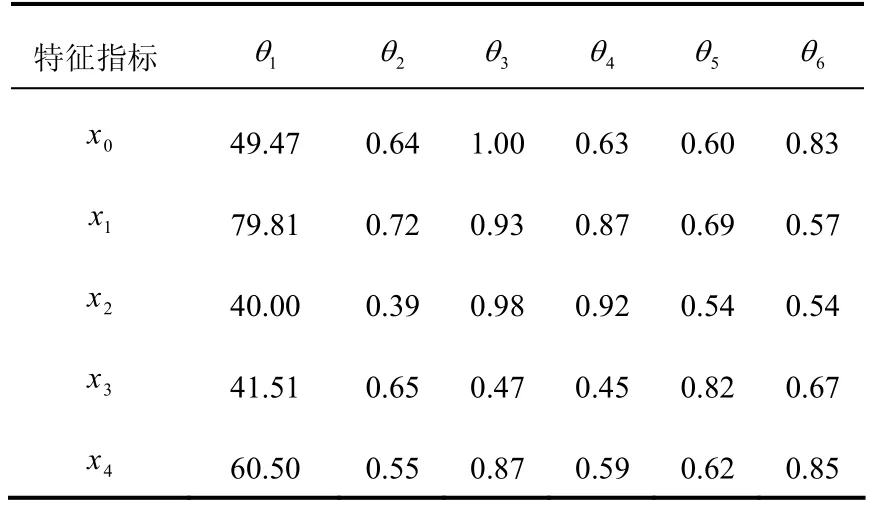
表1 当前观测与粗关联目标指标值
由关联计算得各目标的灰色关联度,如表2示。

表2 各目标的灰色关联度
将灰色关联度看作是对目标的关联支持度,为了说明属性信息对关联的支持,分别对表示状态信息3个状态指标与上述6个指标的关联度进行比较,如表3示。
若不考虑属性信息,虽然3个状态信息指标灰色关联的结果是x1,与标定的关联结果不一致。
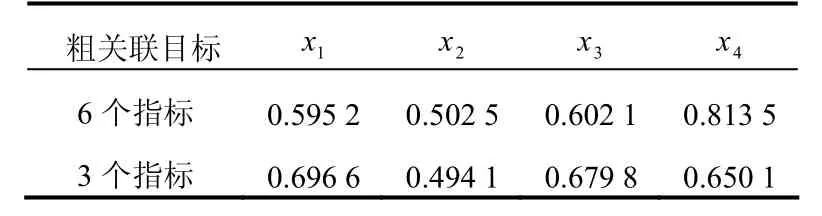
表3 不同指标的灰色关联比较
将最大离散度权与平均赋权法求得的灰色关联度进行比较,如表4示。

表4 两种不同赋权法的关联比较
由表4可知,虽然平均赋权法最终的关联目标为x4,但各目标灰色关联度比较接近,给关联决策造成不便。最大离散度权合理地评价各指标的重要性,有效地改善关联区分程度,提高了关联效率。
4 结语
新的多特征目标关联算法不需要知道目标的分布类型和先验概率,算法简单,运算量较小,能够满足实时关联的要求;加入属性信息,可明显改善关联效果;最大离差法大大改进了目标关联的区分程度,使关联判断更快捷、有效。此外,目标的其它属性信息,只要能表征目标的属性特征,均可作为灰色关联指标来改善目标关联效果。
[1]杨洁,陈炜.基于一维距离像的地面运动目标特征辅助跟踪算法[C].北京:航空航天大学出版社,2008:125-127.
[2]何友,王国宏,关欣.信息融合理论及应用[M].第1版.北京:电子工业出版社,2010: 194-202.
[3]齐伟,杨风暴,周新宇.一种多传感器数据融合系统融合方案研究[J].通信计术, 2010,43(10): 84-86.
[4]黎蔚,杨凯鹏,陈家新,等.一种基于特征自动选取的跟踪算法[J].通信技术, 2010,43(03):128-130.
[5]GUAN Xin,HE You,YI Xiao.Gray Track-to-track Correlation Algorithm for Distributed Multitarget Tracking System[J].Singal Processing,2006,86(01):3448-3455.
[6]刘思峰,谢乃明.灰色系统理论及应用[M].第1版.北京:科学出版社,2010:93-110.
[7]陈水利,李敬功,王向公.模糊集理论及其应用[M].北京:科学出版社,2005:189-207.
[8]王凯琢,付元昌,江凌生,等.基于改进灰色理论的威胁指标权重技术[J].计算机工程, 2009, 35(14): 151-153.
[9]张慧颖.基于灰靶决策的多指标评判法及其在公路网评价中的应用[J].数学的实践与认识, 2008,38(10):31-38.
猜你喜欢
中国西部(2022年2期)2022-05-23 13:28:20
南大法学(2021年6期)2021-04-19 12:27:30
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:40
活力(2019年15期)2019-09-25 07:22:12
测控技术(2018年6期)2018-11-25 09:50:24
Coco薇(2017年2期)2017-04-25 17:59:38
Coco薇(2017年2期)2017-04-25 17:57:49
水利科技与经济(2017年12期)2017-04-22 03:10:20
为了孩子(3~7岁)(2016年8期)2016-05-14 09:06:17
电源技术(2015年11期)2015-08-22 08:50:18
