基于STM32F103和IFOC的三相交流感应电机测控系统设计
2011-08-11 07:10杨根莲李信德宁平华
湖南工程学院学报(自然科学版) 2011年4期
杨根莲,李信德,宁平华
(1.马鞍山职业技术学院,马鞍山243031;2.湖南工程学院,湘潭411104)
0 引 言
交流感应电机因为结构牢固,运行稳定可靠,成本低廉和高效率而被广泛使用,但是交流电机的电磁关系具有多变量、非线性和强耦合特性,用传统的方法很难对其进行精确控制,因而限制了它在精确定位、转矩控制、速度控制等场合中的应用[1].近年来,随着交流电机控制理论研究的不断深入,新的交流电机控制算法也层出不穷,为交流感应电机应用范围的扩大提供了可能.间接磁场定向控制就是其中之一,它采用转子磁场定向的方法,实现定子电流的励磁分量与转矩分量的动态解耦,采用PI连续调节方式,实现转矩与转子磁场的控制.为实现这些功能需要进行大量的数据运算及实时控制,对微处理器运算能力和速度要求很高.用传统的单片机来控制很难满足要求.本系统选用ST公司STM32F103RC控制器,它是一款基于ARM Cortex-M3内核且拥有丰富外围资源的高性价比32位微控制器.它最高72MHz的时钟频率以及片内三相PWM波发生器、正交编码器接口、ADC以及CAN、USB等多种通信接口使IFOC算法能够高效便捷的实现.
1 IFOC算法
1.1 算法简介
IFOC算法的核心思想就是通过坐标变换将定子电流分解为产生磁场的励磁电流分量和产生转矩的转矩电流分量,使感应电动机的控制能像直流电动机控制一样简单.因为转子磁通矢量要通过定子电流和其它参数计算获得,因此称为间接磁场定向控制[2].
1.2 算法的主要内容
为了求得转矩电流分量iq及磁场电流分量id与电机相电流ia,ib,ic的关系,需要进行Clarke变换和Park变换,Clarke变换是将三相同步旋转坐标系变换到两相静止坐标系(也称3/2变换),Park变换则是将两相静止坐标系变换到两相同步旋转坐标系(也称矢量旋转变换).
当电机定子绕组采用星形接法时,Clarke变换关系为:
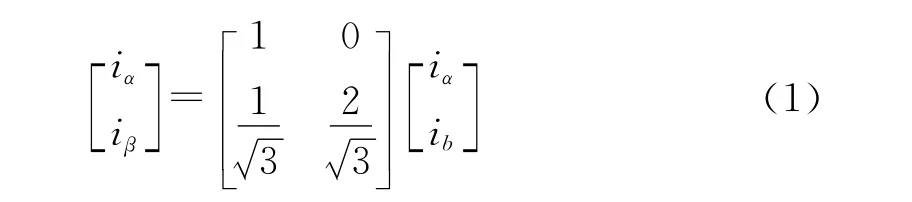
上述方程中因为定子采用三相星形接法,所以ia+ib+ic=0.α,β坐标系相对于定子是静止的,且坐标系的α轴与等效的三相系统的a相夹角θ为零.
Park变换将静止的α,β坐标系变换为旋转的d,q坐标系,其关系式为:

式中,λ是α轴与d轴之间的夹角,λ=ω1t+λ0,λ0是初始位置角.但是要实现IFOC控制还有一个条件必须满足,α轴的方向必须与转子的磁场方向相同.以上两种变换中各坐标系的关系如图1所示.

图1 Clarke和Park变换中各坐标系的关系
将异步电机的电压方程和磁通方程变换到d,q坐标系中,表示如下:

由于我们在Park变换时使d轴与转子磁通保持一致,所以Ψqr=0,Ψdr=Ψr.因此可得到电机的电磁转矩和转子磁通分别为[3]:

其中P为定子的极数,τ为转子时间常数.
由式(5)和(6)可知转子的磁化分量和电磁转矩分量已经解耦,转子内的磁通大小只取决于定子电流在d轴上的分量,而在保持转子磁通不变的前提下电机的电磁转矩只取决于定子电流在q轴上的分量.
1.2 算法实现的主要步骤
·测量电机的数值(相电压和电流).
·用Clarke转换将它们转换成2相系统 (α,β).
·计算转子磁通空间矢量的大小和角度位置.
·用Park转换将定子电流转换成d,q坐标系统.
·定子电流的转矩(iqs)和磁通(ids)分量由控制器分别进行控制.
·用去耦模块计算定子电压空间矢量的输出值.
·通过Park反向转换将定子电压空间矢量从d,q坐标系统转换回相对于定子静止的2相系统.
·通Clarke反变换转换将输出正弦调制生成3相输出电压.
2 系统硬件设计
根据以上对算法的分析和用户对该类产品的典型需求,硬件总体设计如图2所示.STM32F103RC是系统的控制核心,它根据用户本地键盘输入或RS232通信所下达的命令,对交流电机进行闭环控制.控制环中前向通道是通过SVPWM驱动模块将算法的结果转变成三相上、下桥臂IGBT驱动信号对IPM模块进行驱动以控制交流电机运转状态;后向通道包括两路反馈信号,一路采集定子的电流,另一路获取转子的位置和速度.除此以外还包括电源变换及电压监测模块和电机实时数据显示的液晶模块.

图2 系统硬件总体设计框图
2.1 STM32F103控制模块
STM32F103RC是整个测控系统的控制核心,它是ST公司推出的基于ARM Cortex-M3架构的32位嵌入式微控制器.它最高工作频率可达72 MHz,具有单周期乘法和硬件除法功能,片内拥有256K字节的Flash ROM和64K的SRAM,且设有3路16通道的12位ADC和2路12位DAC和11个16位定时器(其中两个高级定时器可设置成带死区时间控制和急停输入的三相PWM发生器),还包括IIC、USART、CAN、USB2.0在内的多种通信接口以及JTAG程序烧写和在线调试接口等外设资源[4].以上资源为整个算法实现和系统的实时控制提供较好的解决方案.
2.2 电源与液晶显示模块
系统控制电源采用24V开关电源供电,系统所用芯片供电等级为以下几种:一种为15V,给IPM模块TSM1818供电;另一种为5V,包括液晶显示模块和编码器差分信号接收芯片26LS32等;第三种为3.3V,包括主控芯片STM32F103RC及电源监测芯片MAX708,因此需要采用两级降压稳压电路.前两级将24V变为15V和5V,考虑到压差较大,若用线性稳压芯片如78L05则发热过大,所以选用开关型稳压芯片LM2567-5.0,保证系统控制部分供电稳定、高效;第二级将5V变为3.3V,选LM1117-3.3即可,图3(a)、(b)分别为5V和3.3 V稳压电路.显示采用320*240点阵显示模块JRD320240D,以RA8802为驱动芯片.

图3 电源稳压
2.3 JTAG、键盘与RS232接口
因为按键较少,所以每一个按键单独连接一个IO脚进行检测.RS232通信接口用ST3232作电平转换,如图4所示.
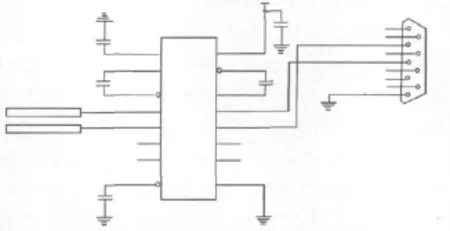
图4 RS232通信接口
2.4 编码器反馈和定子电流采样调理模块
PWM调速过程中,必然伴随着电压、电流的突变.因此在系统设计时,一方面要设法减少这些突变产生EMI;另一方面要设法提高易感元件的抗干扰能力.编码器产生的5V反馈信号从电机的轴端要经过较长线路的传输后才能送入控制器进行处理,很容易受到干扰.为提高该类信号的抗干扰能力,A、B、Z信号均采用差分信号传输,在进入控制器前再用26LS32将差分信号转变成单极信号,如图5所示.定子电流检测电路通过电阻取样,将电流信号转变成电压信号,再经过运放调理成0~3.3V信号送入控制器ADC进行转换,如图6所示.


2.5 SVPWM驱动模块和IPM模块
为提高系统的可靠性与稳定性,本系统采用三菱公司的TSM1818智能功率模块,该智能模块集整流、逆变及刹车功能于一体.系统只需将三相电源和控制器产生的经过高速光藕6N139隔离后的三相SVPWM信号送入IPM模块即可实现对电机的控制.
3 系统软件设计
ST公司提供了标准函数库和电机控制函数库2.0,在库中对IFOC算法需要进行的基本事件定义了相应的函数,因此软件设计的任务相对较轻[5].图7为软件的总体架构,需要进行的工作为以下几方面:①根据系统的硬件配置对库中的函数参数进行定制;②设计点阵液晶驱动程序、按键检测程序;③RS232通信接口配置及事件响应程序;④在库函数基础上设计本系统的任务调度和用户接口程序,图8为系统任务调度和用户接口main函数流程.


4 结束语
本文对当前较为流行的IFOC算法进行了较为深入的探讨,并对以STM32F103RC作为控制器的三相异步电机测控系统的硬件设计与软件设计方法做了详细的介绍.通过样机的测试结果表明,该设计方案能较好的完成对三相交流感应电机的调速控制与运行状态监测.但研究过程中发现IFOC算法实现过程中的关键参数转子磁通的间接测量很容易受温度等外界因素的影响而导致误差,因此必须采取措施进行补偿,这也是本系统后续的研究重点和改进方向.
[1] 高景德,等.交流电机及其系统的分析(第二版)[M].北京:清华大学出版社,2005:305-402.
[2] 陈 坚.交流电机数控模型及调速系统[M].北京:国防工业出版社,1989:40-114.
[3] T.A.Lipo and D.W.Novotny.Vector Control and Dynamics of AC Drives[M].Oxford University Press,1996.
[4] ST.STM32F103xC,STM32F103xD,STM32F103xE[EB/OL].www.st.com,2009.
[5] ST.UM0483User Manual[EB/OL].www.st.com,2008.
猜你喜欢
防爆电机(2021年1期)2021-03-29
哈尔滨铁道科技(2020年4期)2020-07-22
测控技术(2018年2期)2018-12-09
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
电测与仪表(2015年12期)2015-04-09
电机与控制应用(2015年10期)2015-03-01
电机与控制应用(2015年3期)2015-03-01
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04