韶关—广州段电气化牵引变电所越级跳闸的原因与处理对策
2011-08-08 02:31:14刘让雄李日福
铁道机车车辆 2011年6期
刘让雄,李日福
(1 广州铁路职业技术学院,广东广州510430;2 广深铁路股份有限公司 广州供电段,广东广州510010)
韶关—广州段(韶广段)电气化工程共新建6个牵引变电所,于2001年开通运行。该段牵引变压器采用YN/▽阻抗匹配平衡型变压器,牵引变压器一二次侧分别采用SW6-110型少油断路器和ZN12-27.5型真空断路器。牵引变压器保护采用 WBZ-61A型微机保护装置,主要配置了电流差动保护、110 k V三相低压过电流保护和27.5 k V单相低压过电流保护等。馈线保护采用WXB-63型微机保护装置,主要配置了阻抗Ⅰ段保护、阻抗Ⅱ段保护、电流速断保护与过电流保护等。对牵引网而言,上述配置形成了3级保护。其中阻抗Ⅰ段保护与阻抗Ⅱ段保护是牵引网的主保护(第1级),牵引变压器27.5 k V单相低压过电流保护则作为牵引网的近后备保护(第2级),而110 k V三相低压过电流保护则作为牵引网的远后备保护(第3级)。该套保护系统运行至今发生过数起接触网故障造成牵引变压器27.5 k V单相低压过电流保护动作,形成了越级跳闸,造成上下行接触网同时停电,扩大了故障停电范围,严重干扰了繁忙干线的铁路运输。尽管这种越级跳闸故障发生的概率不高,但其产生的后果严重,而且不是偶然的,因此,必须找到其产生的根源并加以改进克服。
1 原因分析
1.1 继电保护装置发生越级跳闸的几种主要情况
(1)本级保护断路器拒分。即本级保护装置正常启动并出口,但因保护装置出口至断路器跳闸回路或断路器操作机构出现异常,导致断路器未能分闸而未能及时切除故障,引起其后备保护动作。
(2)本级保护未启动或虽启动但没有出口。本级保护未能启动,主要原因:一是采样回路故障未能正常采样;二是整定值偏大,故障值没有达到其动作值。保护装置启动了而没有出口则可基本确定为保护装置内部故障。
(3)本级保护启动了且断路器跳闸回路及断路器操作机构均正常。这种情况,则主要因为本级保护与其后备保护的动作时限配合不合理,造成本级保护尚未跳闸而其后备保护先跳闸。
经过故障排查,逐一排除了韶广段牵引变电所越级跳闸既非本级保护断路器拒分,也非本级保护未启动或虽启动但没有出口。经查设计资料,3级保护的动作时限整定分别为:110 k V侧三相低压过电流保护1 s、27.5 k V单相低压过电流保护0.7 s、阻抗Ⅱ段保护0.5 s、阻抗Ⅰ段保护0.1 s。其动作时限配合如图1所示。
由图1知,27.5 k V单相低压过电流保护与馈线阻抗Ⅱ段保护之间的时间级差Δt只有0.2 s。测试分析,发现该时间级差Δt设置成0.2 s不合理。
1.2 保护装置时间级差Δt的确定
通过对继电保护装置各动作环节的分析,要确定保护装置的时间级差Δt应考虑下列因素:
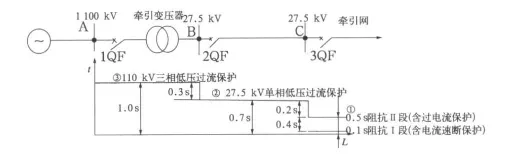
图1 韶关—广州段牵引变电所三段式保护动作时限配合图
(1)微机保护装置固有动作时间t1
微机保护装置固有动作时间t1是指在该保护装置的动作时间整定为零时,当系统发生故障,保护装置检测到故障,给出动作信号至保护出口继电器(BCJ)动作闭合的时间。
对于WXB-63型馈线微机保护装置,其固有动作时间包含CPU采样检测及运算时间、I/O出口时间和断路器驱动放大回路时间3部分。CPU采样检测及运算时间主要取决于保护算法。WXB-63型馈线微机保护装置采用的是离散傅里叶算法,其数据采样要求为一个工频周期(s),即检测到故障所需要的时间约为20 ms;I/O出口回路采用的是微型继电器,微型继电器动作闭合的时间约为10 ms;断路器驱动放大回路中出口继电器(BCJ)采用的是电磁型继电器,继电器动作闭合的时间约为40 ms。总的固有时间约为70 ms。
现场对WXB-63型馈线微机保护装置进行固有动作时间测试,测试结果为76 ms,即0.076 s,与理论值基本相符。
(2)断路器固有分闸时间t2
断路器固有分闸时间t2是指断路器的分闸线圈受电到断路器的动静触头断开瞬间的动作时间。依据ZN12-27.5型真空断路器的技术说明书,固有分闸时间为≤0.08 s,此值与实测值接近。故此断路器的固有分闸时间取0.08 s。110 k V侧三相少油断路器在牵引变电所保护系统中处于最后一级动作,所以它的固有分闸时间可以不考虑。
(3)断路器触头分闸时间t3
断路器触头分闸时间t3是指断路器的动静触头分开瞬间到分闸结束的时间。ZN12-27.5型真空断路器触头行程25±2 mm,分闸速度1.3~1.8 m/s。据此计算断路器的分闸时间约为0.015~0.021 s。在此取较大值0.021 s。
(4)可靠性时间t4
可靠性时间t4是一个综合性的时间,它包括断路器主触头灭弧的时间和微机保护装置的返回时间。由于交流电弧过零点熄灭的物理特性,断路器电弧熄灭需要半个周波至一个周波时间,需10~20 ms,再考虑在极端情况下断路器开断短路故障电流时,真空断路器灭弧室由于电弧不能及时熄灭,造成电弧重燃,一般还会有1~2个周波的短路电流继续经过断路器流入故障线路,时间为20~40 ms。
微机保护装置的返回时间主要取决于保护装置微机算法采样所需时间和出口继电器的返回时间。WXB-63型馈线微机保护装置数据采样要求为一个工频周期s),所需时间为20 ms。微机保护装置出口继电器采用的是微型继电器,其返回时间小于8 ms。因此,整个微机保护装置的返回时间大约为28 ms。
继电保护装置的可靠性时间t4大致为20+40+28=88 ms,再考虑可能产生的误差,取该时间为0.1 s。
综上所述,继电保护装置除设定的动作时限外,要确保完成保护出口、断路器可靠分闸与保护装置可靠返回所需的时间为t=t1+t2+t3+t4=0.076+0.08+0.021+0.1=0.277 s。
为了保证保护装置动作的选择性,必须保证保护时间级差Δt应大于保护装置总的固有动作时间t=0.277 s。而韶广段各牵引变电所27.5 k V单相低压过电流保护与馈线阻抗Ⅱ段保护之间的时间级差Δt只有0.2 s。如此设置不合理。当运行中出现以下几种情况时:
① 故障点超出阻抗Ⅰ段的保护整定范围;② 馈线保护的下一级分区所保护发生拒动,馈线保护装置作为分区所保护的后备保护时;③ 接触网电分相故障发生异相间通过空气绝缘形成电弧短路,短路阻抗角发生较大偏移。
馈线阻抗Ⅰ段保护将不会动作,此时馈线阻抗Ⅱ段保护启动,但由于馈线阻抗Ⅱ段保护与27.5 k V单相低压过电流保护之间的动作时间级差Δt偏小,极有可能出现牵引变压器二次侧断路器越级跳闸或馈线断路器与牵引变压器二次侧断路器同时跳闸的现象。实际运行中就发生过这样的故障。
2 处理对策
针对上述情况,于2008年对该供电段牵引变电所各保护装置动作时限的配合时间级差Δt进行调整,将馈线保护装置的阻抗Ⅱ段和过电流保护动作时限由原来的0.5 s调整为0.4 s,其余的保护动作时限不变,使各级保护间的动作时间级差Δt调整后均为0.3 s,既满足时间级差的要求又不突破上一级保护的动作时间要求。具体调整如表1所示。
调整后的动作时限配合如图2所示。
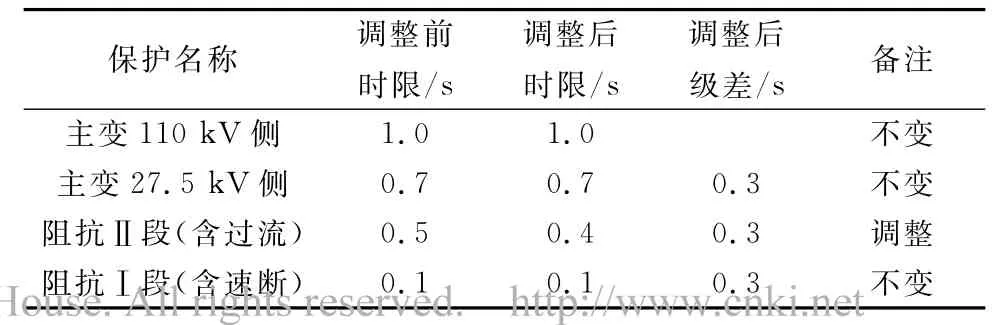
表1 韶关-广州段牵引变电所继电保护系统动作时限调整表
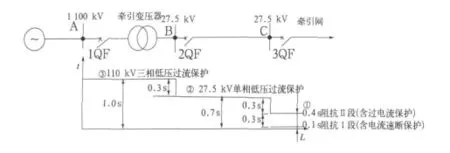
图2 韶关—广州段牵引变电所三段式保护动作时限配合图
经调整后运行至今,该段牵引变电所继电保护装置尚未再发生牵引网故障而引起牵引变压器二次侧断路器的越级跳闸。证明这一安全隐患得到根治。
3 结束语
继电保护装置是牵引变电所的神经中枢,是牵引供电系统安全可靠运行的重要保证,要求其必须满足选择性、速动性、灵敏性和可靠性的要求。对于继电保护装置的选择性要求,主要通过动作值整定与动作时限的配合来实现。设计规范对保护装置的动作时限配合没有明确的定量标准,需要充分考虑所配置的保护装置及所对应的断路器等相关设备的技术特性,全面分析与准确计算保护动作过程各个环节所需的时间,合理确定保护装置动作时限的配合时间级差Δt,从而消除继电保护装置选择性不可靠的隐患,确保牵引供电系统的安全可靠运行。
[1]WXB-63型馈线微机保护装置技术说明书[R].
[2]ZN12-27.5型真空断路器的技术说明书[R].
[3]ZN12-27.5真空断路器与 WXB-63型微机保护装置特性试验报告[R].
[4]刘绍峻.高压电器[M].北京:机械工业出版社,1989.
猜你喜欢
科技与创新(2022年11期)2022-06-14 01:45:56
设备管理与维修(2020年23期)2021-01-04 00:15:14
中国医疗器械信息(2020年10期)2020-01-19 17:22:38
智族GQ(2019年7期)2019-08-26 09:31:36
西部探矿工程(2018年9期)2018-09-11 10:15:44
高校招生(2017年5期)2017-06-30 10:49:44
电子制作(2017年1期)2017-05-17 03:54:38
电子制作(2016年11期)2016-11-07 08:43:37
电测与仪表(2015年9期)2015-04-09 11:59:20
断块油气田(2013年2期)2013-03-11 15:32:52