微变形监测雷达(IBIS系统)
2011-08-06 15:25王俊宇
城市勘测 2011年6期
王俊宇
(长春市测绘院,吉林 长春 130021)
1 微变形监测系统系统的发展简介
在过去的十几年中,国外学者开发出许多地面的传感器来实现 GBInSAR(Ground-Based Interferometric SAR),并作了相关的研究。1999年D Tarchi等利用LISA(Linear Synthe-tic Aperture Radar)对威胁奥地利的Schwaz镇的滑坡体进行了变形监测研究;G Luzi等对Belvedere冰川的移动进行了研究;G Antonello等利用星载SAR和地面SAR研究了Stromboli火山的变形。
IBIS(Image By Interferometric Survey)系统是由意大利IDS公司和佛罗伦萨大学经过6年合作研发的结果,它能够对目标物提供连续、全面的监测[1]。它将步进频率连续波技术(Stepped-Frequency Continuous Wave)和干涉测量技术相结合,能够广泛应用于建筑物、桥梁、高塔、坝体、公路和铁路边坡等微小位移变化的监测。IBIS系统分为两种型号,IBIS-S(Image By Interferometric Survey of Structures)与 IBIS-L(Image By Interferometric Survey of Landslides and slopes),其各自功能特点如下:
IBIS-S主要用于对桥梁、建筑物、高塔等易发生微小变化的物体进行精确的监测,得到被测物每部分的位移变化量,分析建筑物或桥梁上每一个点的变形、振动情况。此外,通过该设备能够及其便捷地对桥梁或建筑物进行健康普查和评估。IBIS-S的测程为0.01 km~2 km,精度为±(0.1~0.01)mm,最大采样频率 200 MHz。
IBIS-L可对大坝,边坡,建筑物等易发生微小位移变化的物体进行精确的监测,得到被测物每部分的位移变化量,分析水库变形机理和变形特征,评价地质灾害。此外,通过该设备能够及时对各种危险区域做出灾害预报,极大减少或避免灾害对人民生命财产造成的损失。IBIS-L的测程为0.2 km~4 km,监测精度为±0.1 mm,最小采样间隔为5 min。
2 IBIS系统的三个关键技术
2.1 步进频率连续波(SF-CW)技术
IBIS系统的主体设备是一台KU波段(16.6 GHz~16.9 GHz)的步进频率连续波雷达。雷达的距离分辨率△r与单个雷达脉冲的持续时间τ有以下关系:

式中,c为光速。雷达单个脉冲持续时间τ与带宽B的乘积为1,故式(1)可以写成:

由上述两个式子可以看出,要增加雷达的距离分辨率,我们可以减少τ或者增大带宽B。减小τ,会造成脉冲波的频率增加,作用距离变短。为了保持一定的距离分辨率和一定的作用距离,IBIS的雷达采用了SF-CW技术,即在一个周期内发射步进频率为△f的一组N个电磁波(如图1所示),采用这样的发射方式后,IBIS的雷达的有效带宽Beff为:

由于IBIS的雷达是处于16.6 GHz~16.9 GHz的Ku波段,故其带宽B为 0.3 GHz,代入式(2),可以得出,IBIS雷达的距离分辨率为0.5 m,且该雷达的距离分辨率与作用距离无关。图2为IBIS雷达距离分辨率示意图。分析图2可见,根据回波强度,我们可以很好地分辨出目标点,很好地得到目标点在电磁波传播方向上的位移变化。同时发现,当两个目标点处于距离IBIS雷达的统一区间的时候,此时,将无法准确地得到目标点的信息。
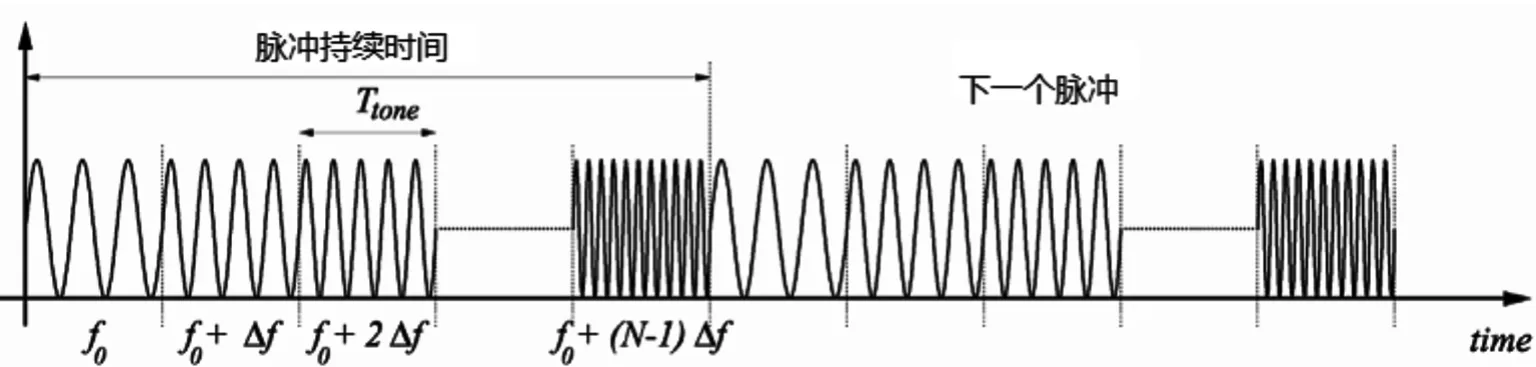
图1 SF-CW雷达波示意图
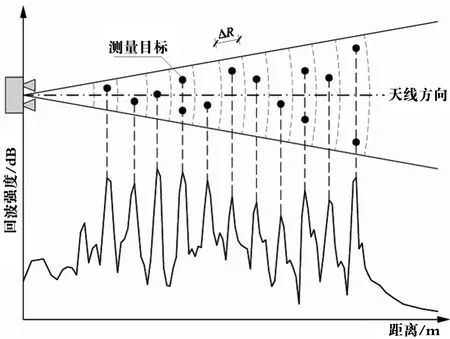
图2 距离分辨率剖面图
2.2 合成孔径雷达(SAR)技术
合成孔径雷达技术是利用雷达与目标的相对运动把尺寸较小的真实天线孔径用数据处理的方法合成一个较大的等效天线孔径的雷达[2]。合成孔径雷达的特点是分辨率高,能全天候工作,能有效地识别伪装和穿透掩盖物[3]。合成孔径雷达技术主要用于IBIS-L上,该技术主要是为了提高IBIS系统的角度分辨率,可以在保持现有雷达天线不变动的情况下,使雷达的角度分辨率大大的提高。IBIS-L型号仪器有一条长为2 m的线形扫描器轨道,故雷达天线可以在电脑的控制下,直线沿着轨道运动,使雷达从不同的角度发射电磁波,从而提高雷达的角度分辨率。IBIS-L的角度分辨率可以达到4.5 mrad。角度分辨率对应着的空间的横向分辨率=角度分辨率×距离。于是,在雷达具有距离向分辨率和角度向分辨率之后,能够将这个监测区域分割成很多单元,采集每一个单元的位移信息,再将所有信息结合起来。距离向以0.5 m为一单元进行分割,角度向以4.5 mard为一个单元进行分割。雷达最大的监测区域可达7 km2,最大分割单元数量可达200000个。IBIS-L系统的空间分辨率示意图如图3所示。

图3 IBIS-L空间分辨率示意图
2.3 干涉测量技术
干涉测量技术是一项用途十分广泛的测量技术,其通过比较在不同时刻的反射回来的电磁波的相位变化来获取物体位移的变化。IBIS系统中,雷达通过干涉测量获取目标体在电磁波传播方向的位移变化dr。

式中,λ为波长,△φ为相位差。
3 IBIS系统的可靠性与精度
由于IBIS系统标称能达到亚毫米的精度,在该系统正式用于工程项目变形监测之前,为了保证IBIS系统测量的可靠性与精度,国外学者已作了大量的对比试验,以下简要列举几个有代表性的试验。
3.1 弹簧振动试验[4]
该试验由Bernardini于2007年进行的。试验的主要设施有两部分,第一部分为一个加装了主动反射装置(角反射器)的弹簧,如图4所示,第二部分为一台IBISS仪器。IBIS-S雷达发射天线距离主动反射装置的距离为7 m,如图5所示。将IBIS-S仪器的最大测量距离设置为50 m,采样频率设置为50 Hz。仪器相关参数设置完毕后,振动弹簧,开始测量。图6显示的是该试验的距离剖面图,从图中,我们可以看到在距离为7 m处,反射波的强度最大,很好地反映出主动反射装置所在的位置。图7是IBIS-S仪器所测量到的,在1000 s内反射体的唯一变化情况,可以看出,其位移变化完全符合小阻尼单自由度机械系统的变化规律。为了更加准确的显示测量数据的特性,将图7的780 s~820 s以及870 s~910 s两个部分进行放大,分别得到图8与图9。
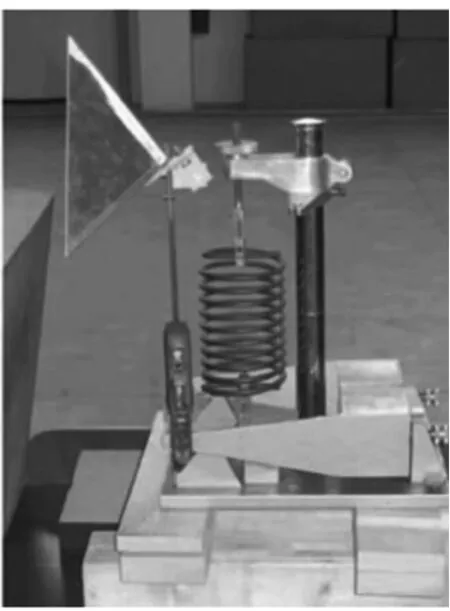
图4 主动反射装置

图5 IBIS-S仪器与主动反射装置安放示意图

图6 距离剖面图

图7 位移变化过程线
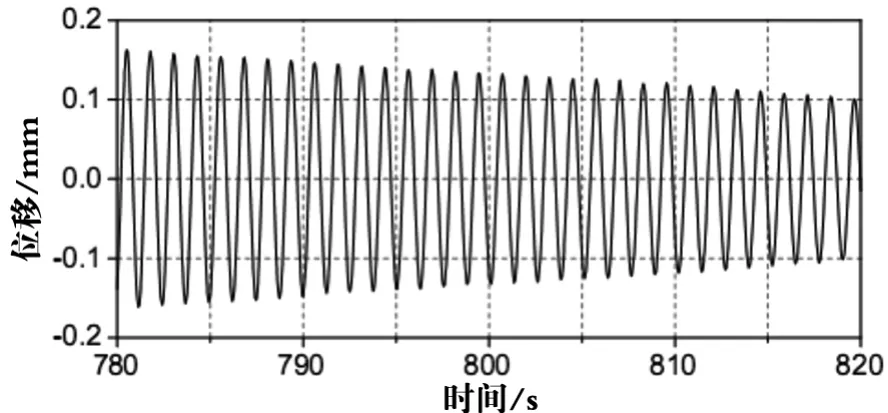
图8 局部放大(780 s~820 s)

图9 局部放大(870 s~910 s)
从图8,我们可以看出,即使是在位移仅仅有0.1 m~0.2 m的时候,IBIS-S系统还是很好的探测到位移的变化,很好的显示了阻尼运动的振幅变化。分析图9,我们可以看到,只有当唯一变化小于0.01 m的时候,IBISS所探测到的位移才发生不符合运动规律的情况。
从上述实验,可以得出,在实验室的条件下,测程为7 m的情况,IBIS-S对位移变化的监测精度优于0.02 mm。
3.2 Capriaet大桥的环境振动测试[5]
Gentile与Bernardini于2008年在Capriaet大桥上进行了环境振动测试(AVT),如图10所示。实验者在大桥上布设了32个WR731A型传感器,这些传感器可以记录速度(mm/s)或加速度信息,是一种识别桥梁的动态特征的传统手段。为了使IBIS-S得到更精确的结果,在一些测试点上安装了6个主动反射装置,为了使传感器与雷达所得到的数据的对比结果更精确,安装的时候,使主动反射装置的安装位置离WR731A型传感器尽可能近。在实验的过程中,由IBIS-S系统得到了距离剖面图,如图11所示。
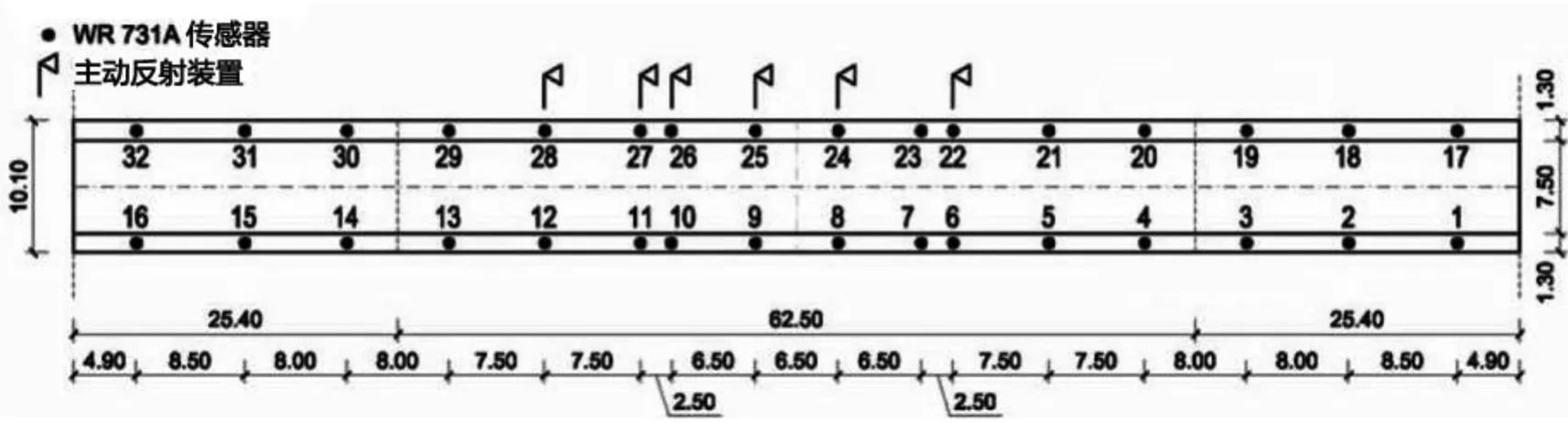
图10 传感器与主动反射装置安装位置示意图
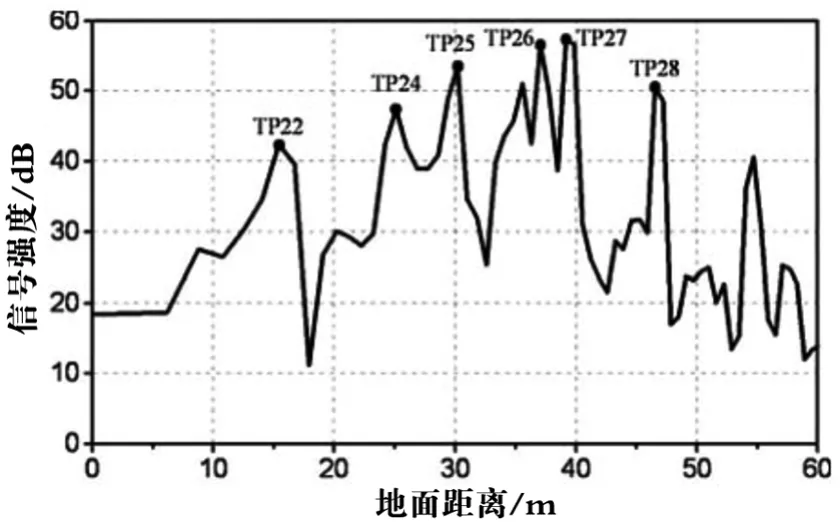
图11 距离剖面图
由图11可以看出,图上信号最强的点,很好地对应了安放主动反射装置的位置,而且说明回波强度最高的点能获取较高的精度。
接下来,在26号点上,比较由WR731A传感器所获得的速度信息与通过IBIS-S系统获得的速度信息,如图12所示。比较两幅图,我们可以得出,用IBIS-S系统所测的速度跟用传统的传感器所测得的速度吻合度很高。两幅图上的细微不吻合的地方,主要由于两种传感器的SNR不同。
接下来,为了保证测试的普遍性,在22、25、27号点上,进行同样的比较,所得到的对比图像分别如图13、14、15。分析这三个图,可以得出相同的结论,即IBIS-S系统所测的速度跟用传统的传感器所测得的速度吻合度很高,充分说明了IBIS-S系统的可靠性。

图12 26号点上不同传感器所测得的速度
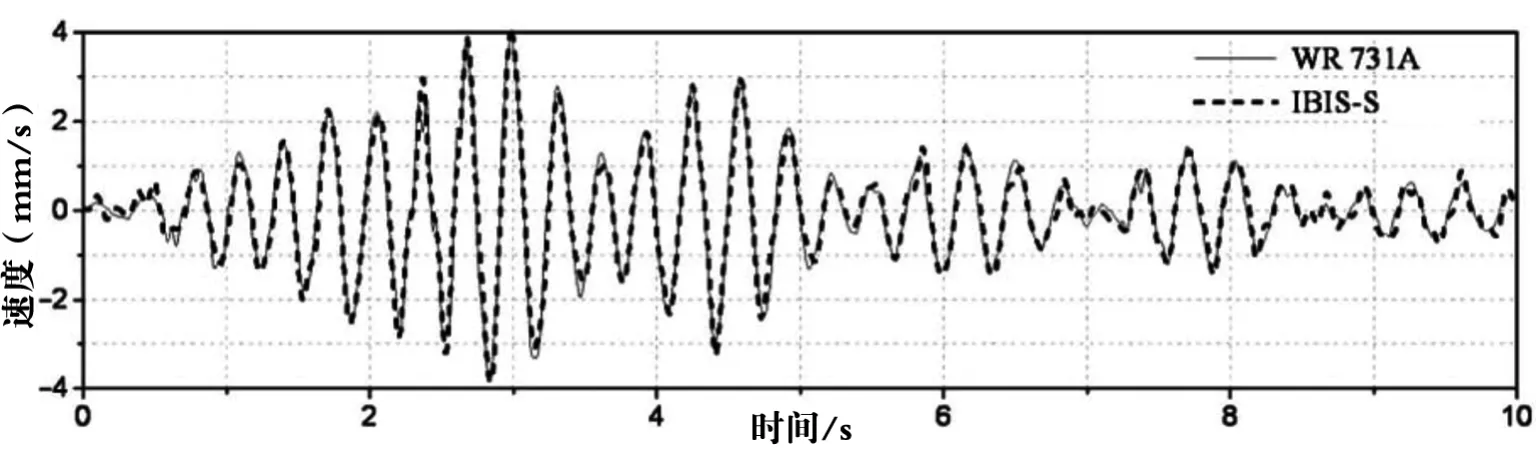
图13 22号点上不同传感器所测得的速度对比图

图14 25号点上不同传感器所测得的速度对比图

图15 27号点上不同传感器所测得的速度对比图
以上两个实验,证明了 IBIS系统的精度优于0.02 mm,且其在长时间观测的情况下,稳定性也可以得到保证。
4 IBIS系统在国内的应用
IBIS在国内的首次应用是在CCTV新台地上所做了一个动态性试验[6],如文献[4]所示,在该动态试验中,IBIS对CCTV新台址做了持续时间为59 min 57 s,采样率为1 Hz的,动态监测试验。对实验结果进行分析表明,在最大变形不超多1.2 mm的时候,IBIS系统仍然能够检测出监测点的变形规律,可以证实IBIS系统的高精度。在对上述数据进行频谱分析[7],并用其得到的振动频率与理论计算得出的振动频率[8]相比,一阶振型自振频率的实测值与理论计算值差异稍大,为6%,第二、三阶的自振频率的实测值与计算值很吻合,误差不超过1%。由此可以表明,IBIS系统在监测高层建筑的动态特性上也是可行的。
除了上述之外,IBIS系统还广泛应用我国其他的工程项目中。目前,IBIS-S系统已经应用于四川金沙江大桥(静态挠度测量、动态挠度测量、自振模态分析),宝成铁路清江七号桥(动态挠度测量),漳龙高速石崆山大桥(桥梁挠度与振动测试),杭州钱塘江大桥(静态挠度测量),京津高速铁路杨村大桥(动态挠度测量)。IBIS-L系统现已应用于龙头石水电站大坝监测。
5 IBIS系统存在的不足
IBIS系统作为一种全新技术,以其高精度,实时性以及高稳定性,在变形监测,特别是需要动态监测的领域有着广泛的应用前景。但是,我们同样要看到IBIS系统目前存在的不足。就目前而言,IBIS系统主要有两点不足:
(1)IBIS雷达获取的只是一维的图像,距离分辨率为0.5 m,这就意味着,当测量的目标物体到仪器的距离相差不大的时候,IBIS系统很有可能无法正确识别目标物体。
(2)IBIS系统获取的位移变化信息是位于电磁波传播方向上的,因此,如果我们需要获取目标点真实的三维位置变化情况,就必须要知道测量时仪器以及电磁波的方位信息。
[1]IBIS-S仪器设备介绍[EB/OL].www.Pt-cn.com
[2]何宁,齐跃,何斌等.地表微变形远程监测雷达在大坝监测中的应用[J].中国水利,2009(8):46~47
[3]谭显裕.合成孔径雷达的特点及其军用探测研究[J].航天电子对抗,2002(1):31~35
[4]Bernardini G,De Pasquale G,Bicci A,et al.Microwave interferometer for ambient vibration measurement on civil engineering structures:1.Principles of the radar technique and laboratory tests[A].Experimental Vibration Analysis for Civil Engineering Structures[C]:2007.143 ~152
[5]Bernardini G,Gentile C.Radar-based measurement of deflections on bridges and large structures:Radar techniques and static tests[A].On Site Assessment of Concrete,Masonry and Timber Structures[C]:2008
[6]刁建鹏,黄声享.地面干涉雷达在建筑变形监测中的应用[J].测绘通报,2009(9):45~47
[7]刁建鹏.微波干涉测量在高层建筑动态监测中的应用[J].振动与冲击,2010(11):177~179
[8]郭彦林,霍轶力.CCTV新台址主楼抗震性能研究[J].建筑结构学报,2008(3):10~23
猜你喜欢
电子制作(2019年15期)2019-08-27
数学物理学报(2019年3期)2019-07-23
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年34期)2018-12-18
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
山东青年(2016年3期)2016-02-28
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07