
林区地形条件对GPS定位精度的影响
2011-07-30 10:01徐文兵李卫国汤孟平
浙江林业科技 2011年3期
徐文兵,李卫国,汤孟平,高 飞
(1. 浙江省森林生态系统碳循环与固碳减排重点实验室,浙江 临安 311300;2. 浙江农林大学 环境与资源学院,浙江 临安 311300;3. 石家庄经济学院 勘查技术学院,河北 石家庄 050031;4. 合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
全球定位系统(Global Positioning System,GPS)定位方式有绝对定位和相对定位。绝对定位,也叫单点定位(Single Point Positioning,SPP)[1],常见的如普通型手持GPS测量,由于受到卫星轨道误差、卫星钟差及信号传播误差等诸多因素的影响,同时受手持 GPS接收机性能的局限,精度较低,观测条件良好时可达 5 ~ 15 m[2~3],只能满足较粗泛的林业测量或土地调查等。GPS相对定位又叫差分定位,主要有静态相对定位、动态相对定位等,是通过差分消除相关或相同的误差影响而实现高精度基线测量,精度可达到厘米级及以上,在工程测量中,静态相对定位主要用于控制测量和变形监测等,而碎部测量多采用相对定位中的实时动态载波相位差分RTK(Real Time Kinematic)技术。RTK技术具有差分GPS技术的所有优点,是基于基准站和流动站观测条件相近、电离层和对流层误差相关,从而消除或降低多种误差的影响,实时获取观测结果和定位精度,具有精度高、实时性和高效性[1,4~6]等特点。
数字林业,尤其林区三维建模中,基础数据的采集是最基本的工作,除了常规测量手段,GPS技术已广泛应用于林业测量。而林区地形条件直接影响GPS测量成效,只有控制测量中控制点的地形条件是可控的,地形条件在布点时已予以考虑,而碎部测量中最常用的RTK技术和手持GPS测量的地形条件不具备可选性,差异较大,直接影响到GPS技术在林区测量的可行性和空间可用性。RTK技术和手持GPS的实时定位精度主要通过内符合精度体现的,定位精度的可靠性一般是通过抽样检查来分析内符合精度和外符合精度之间的关系,抽样点是已测定坐标的点。手持GPS在林业测量中已应用普遍,但低精度只能满足粗放的林业测量,虽然有精密单点定位及其他改进单点定位观测值的方法[7],但手持GPS中很少采用,同时考虑到普通的手持GPS仪器性能较差,笔者尝试利用Trimble 5800 GPS接收机代替普通的手持GPS,侧重于通过实验的方式模拟林区周边地形条件,分析Trimble 5800 GPS接收机单点定位和Trimble 5700/5800 GPS接收机RTK技术在不同地形、不同时间段的林业测量中进行定位的精度和特点。
1 试验仪器与研究方法
1.1 Trimble 5700/5800 GPS接收机
Trimble 5700/5800 GPS接收机是由美国Trimble公司生产的全集成GPS接收机,采用内置Trimble Maxwell 4芯片的超跟踪技术,未经过滤、未经平滑的伪距测量数据,可用于进行低噪音、低多路径效应、低时延的差分校正和高动态响应。
Trimble 5700接收机采用有效的低角度卫星跟踪技术、多路径抑制技术,12通道,L1 C/A码、L1全载波、WASS/EGNOS多重观测值,用于建立基准站。标称精度:码差分定位,水平±(0.25 m+1 ppm)RMS,垂直±(0.5m+1 ppm)RMS;静态和快速静态测量,水平±(5 mm+0.5ppm) RMS,垂直±(5 mm+1 ppm×基线长)RMS。
Trimble 5800 GPS接收机,24通道L1、C/A码,L1/L2全周载波相位观测量,高精度的L1/L2多重相关伪距观测值,全重3.57 Kg,内置蓝牙(Bluetooth),ACU控制器操作简便,用于流动站。标称精度:码差分GPS定位,水平±(0.25 m+1 ppm)RMS,垂直±(0.50 m+1 ppm)RMS;实时动态(RTK),水平±(10 mm+1 ppm)RMS,垂直±(20 mm+1 ppm)RMS。
1.2 试验场地选择
GPS技术在林业测量中最大的局限就是复杂多变的地形,不同的地形影响信号的接受、卫星分布图形,树冠和建筑物阻挡或削弱卫星信号强度等,在恶劣的林区地形环境中甚至无法定位,影响正常作业[8]。本试验的林区周边地形选在浙江农林大学东湖校区附近,该校区三面环山,选择了 6个有代表性的不同地形点,点号(sample number,SN)及地形特征如表1;林区地形选在德清县莫干山,测区以毛竹为主,覆盖率较高,利用RTK技术测定莫干山风景区的山界。

表1 试验点的地形条件Table 1 Terrain for test point
1.3 试验过程及数据获取
单点定位:每个点位分5个时间段观测,有上午、中午、下午时段;观测时,Trimble 5800 GPS接收机利用对中杆对中静置,等锁定足够卫星个数后,采用快速静态模式,历元间隔为5 min,每个时间段观测5个历元,自动存储观测点的WGS-84坐标。
GPS-RTK定位:每个点位分上、下午2个时间段观测;观测时,Trimble 5700 GPS接收机作为基准站,架设在已知导线点(A点)上,Trimble 5800 GPS接收机作为移动站,利用对中杆结合脚架对中静置,等得到固定解或一定时间后,采用连续地形点测量模式,历元间隔为1 min,每个时间段观测120个左右历元,自动存贮观测点的WGS-84坐标。
参考值观测:在已有导线点(A点、B点)的基础上,将8个观测点与之构建成闭合导线,其中,C、D点和A、B点分布在测区四周,作为参与点校正的观测点,其余的6个点为试验点,利用2″级索佳全站仪SET2100测量导线的转折角和边长,将观测数据录入Excel表格。
1.4 数据处理方法
本试验主要从导线计算、WGS-84坐标转换、转换后的BJ-54坐标内符合精度计算、BJ-54坐标外符合精度计算、各历元观测值分布图的绘制等方面来处理数据。
(1)根据全站仪导线观测值进行平差计算,导线全长闭合差优于1/7万,解算出各导线点在BJ-54坐标系中的坐标,作为计算GPS-RTK定位外符合精度的参考值。
(2)从试验中获得各点多历元的WGS-84坐标来看,各历元坐标间存在偏差,可见多种误差源的影响值随历元而变化,其中卫星轨道误差、星历误差、电离层延迟、对流层延迟等是单点定位中的共性误差,接收机性能、地形条件、观测时间段等影响因个体而异。试验中,每个点都在相近的时间段内连续观测,以保证共性误差相近,因此可通过式(1)计算同一时间段的各历元平均值、式(2)计算两个时间段各历元观测值的中误差,即各历元坐标的内符合精度,削弱了各试验点上共性误差的差异性,以更客观地评价地形条件对两种GPS测量形式定位精度的影响。其中,单点定位的数据是所有历元统一处理,GPS-RTK测量数据分上、下午两个时段分别处理。

式中,xi,yi(i= 1,2,…,n)为观测值;vi(i= 1,2,…,n)为改正值;σ为中误差。
试验点外符合精度能比较客观地反映GPS定位的精度,在工程测量中,需要将测量成果转换到BJ-54坐标或Xi’an-80坐标与其他资料融合。外符合精度是将参考值作为真值来计算观测值的中误差,如式(3)。

式中,xi(i= 1, 2, …,n)为观测值;Δi(i= 1, 2, …,n)为真误差;X为参考值,θ为中误差。
(3)点校正通常采用两种方法:一是直接采集控制点的 WGS-84坐标,二是利用控制点已有静态观测的WGS-84坐标输入手簿,结合地方坐标求解坐标转换参数[9]。本实验是直接采集控制点的WGS-84坐标,利用测区四周A、B、C、D 4个导线点的BJ-54坐标,在Trimble Color TSCe电子手簿自带软件的“点校正”模块中将观测值的WGS-84坐标转换为BJ-54坐标。单点定位和GPS-RTK测量的转换精度分别如表2所示。从表2可知,由于两种作业方式测量精度的差异性,RTK测量的坐标转换精度明显高于单点定位。
(4)为了更直观反映出试验点在不同时间段、不同历元的观测值、观测值平均值和参考值的分布情况,本试验将6个点的相应值导入Excel中绘制观测值散点图。

表2 坐标转换精度Table 2 Precision of coordinate transformation
2 结果分析
2.1 试验点BJ-54坐标内符合精度分析
将试验点各历元WGS-84坐标转换为BJ-54坐标后,不考虑坐标转换存在的残差,由式(1)和式(2),计算每个试验点多个历元的BJ-54坐标中误差,即内符合精度。单点定位的计算结果如表3,RTK定位的计算结果如表4。
从表3可知:Trimble 5800 GPS接收机单点定位的BJ-54坐标内符合精度(σx,σy)比手持GPS高很多,但受地形条件影响也较大;1号点位开阔,定位精度为分米级;3号低于2号,可见树木的稠密程度对卫星信号的遮挡作用显著;4、5号点说明较远的建筑物和附件水域对GPS测量有一定影响,但影响较小;6号表明高层建筑或山体等恶劣地形直接影响载波相位观测值质量和卫星分布图形,从而定位精度最差,最大值达到4.465 m。
从表4可知,除了较高郁闭度的树林中,GPS-RTK定位的BJ-54平面坐标的内符合精度(σx,σy)都在1 cm之内,与仪器标称精度较吻合;上、下午两个时间段的定位精度相近,表明实验区域内RTK测量的时间可用性良好;精度最高的是5号点,两边建筑物距离较远,同时高度角设置为13°,上空基本空旷;其次是1号点,附近有路灯杆和不远处的建筑物;4号点、6号点精度居中;2号点精度最低,树木的郁闭度较高,大部分是浮动解,但观测一段时间后,有可能得到固定解,精度会大幅度的提高,因此有必要延长观测时间,等待卫星良好的分布图形;3号点精度都是厘米级,可见稀疏的树木对RTK定位精度影响不大。对照表3、表4,各地形条件对两种GPS测量方式的影响程度类似,其中6号点上情况相差甚远,也许和天线位置的高低有关。

表3 单点定位试验点BJ-54坐标的内符合精度Table 3 Internal accord accuracy in BJ-54 with SPP
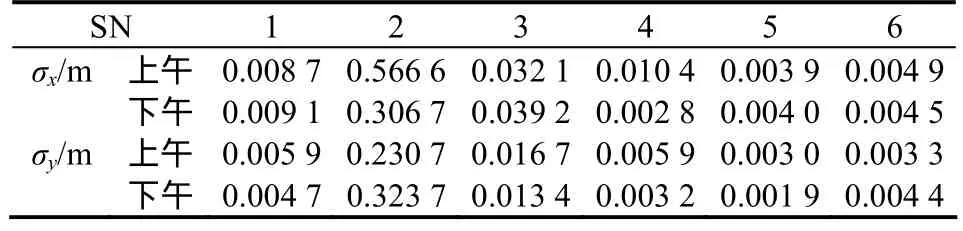
表4 RTK定位试验点BJ-54坐标的内符合精度Table 4 Internal accord accuracy in BJ-54 with RTK
2.2 试验点BJ-54坐标外符合精度分析
将每个试验点每个历元WGS-84坐标都转换为 BJ-54坐标,分别与参考值的BJ-54坐标求差值(Δx,Δy),由式(3)计算差值的中误差,即外符合精度,并求最大差值(MaxΔx,MaxΔy)和最小差值(MinΔx,MinΔy),从三个方面来分析单点定位和 GPS-RTK技术在多种地形中定位外符合精度,如表5、表6所示。
从表5可知,Trimble 5800 GPS接收机单点定位的外符合精度都<5 m,0 ~ 1 m占33%,1 ~ 3 m占34%,3 ~ 5 m占33%,最大偏差9.252 m,最小偏差0.080 m;偏差值较大的试验点地形与建筑物和树木有密切关系。从表6可知,RTK测量的各点外符合精度受地形的影响与内符合精度的情况有一致性,但普遍比内符合精度要大,其中4号点外符合精度优于5号点。
单点定位精度较低,在林业测量中应用较多,而工程测量中主要应用GPS-RTK技术。为了进一步说明地形条件对RTK定位精度的影响,配合中误差分析的结果统计GPS-RTK坐标转换后的测量值与参考值的偏差值,分布如表7。
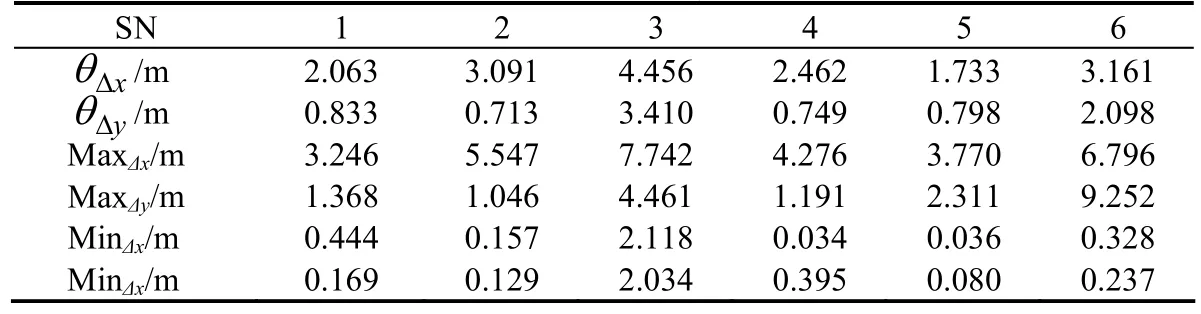
表5 单点定位外符合精度Table 5 External accord accuracy in BJ-54 with SPP

表6 GPS-RTK定位外符合精度Table 6 External accord accuracy in BJ-54 with RTK
2.3 试验点分时段观测值分布图
在Excel软件中,分别导入6个点的各历元观测值、平均值、参考值,绘制散点图,可直观显示不同地形不同历元观测值的分布情况。这里选择 1号、2号、4号、6号,分别代表比较空旷、稠密林地、水域附近和建筑物旁4个典型地形中各点观测值的分布图,单点定位的情况如图1,GPS-RTK的情况如图2。
从图1、图2可知,同一时间段观测值比较聚集,内符合精度较高,和参考值比较存在整体性偏移,不同时间段偏移值存在差异性,因此分时段多历元观测可有效提高定位精度。不同地形定位情况比较:空旷地定位结果最优;稠密林地对GPS测量影响较大,观测值非常分散,RTK测量时大多数历元都是浮动解,若是在山谷中卫星个数有限时,甚至得不到浮动解,而山脊、山坡或平地上选择合适的时间段、延长观测时间,有可能得到了固定解;水面的多路径影响较小;建筑物对单点定位影响较大,会出现飞点,而RTK测量只要能得到固定解,偏差较小。
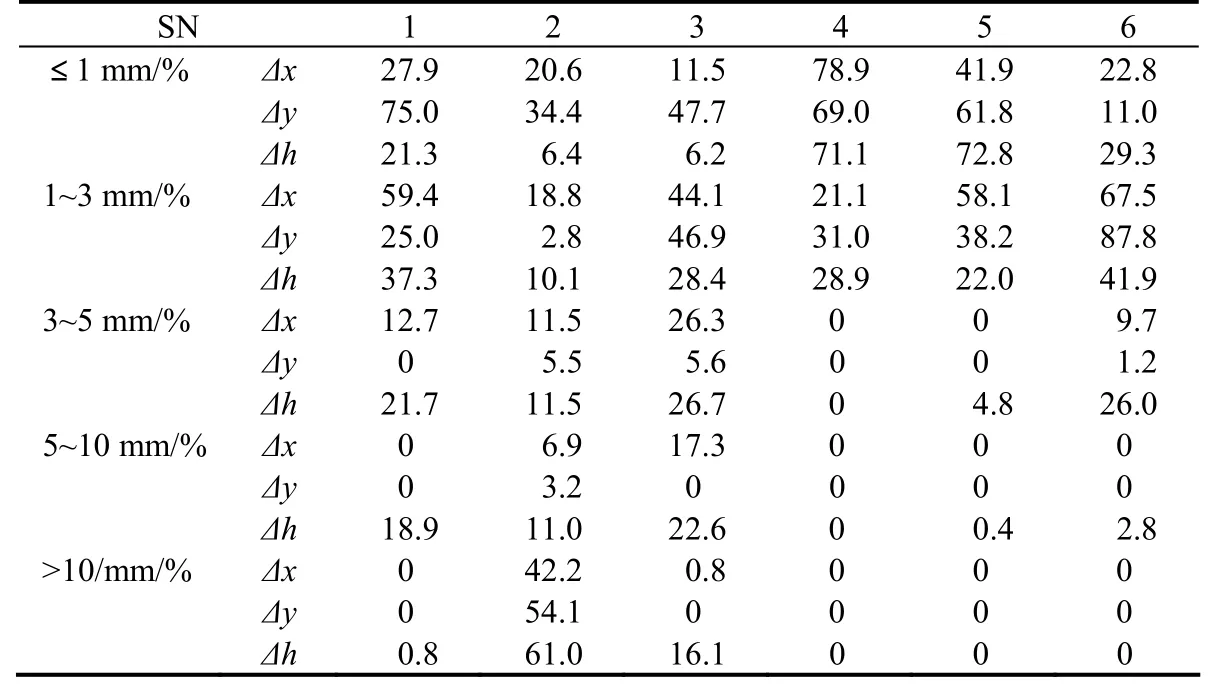
表7 GPS-RTK观测值的偏差分布Table 7 Deviation distribution of determined values with RTK
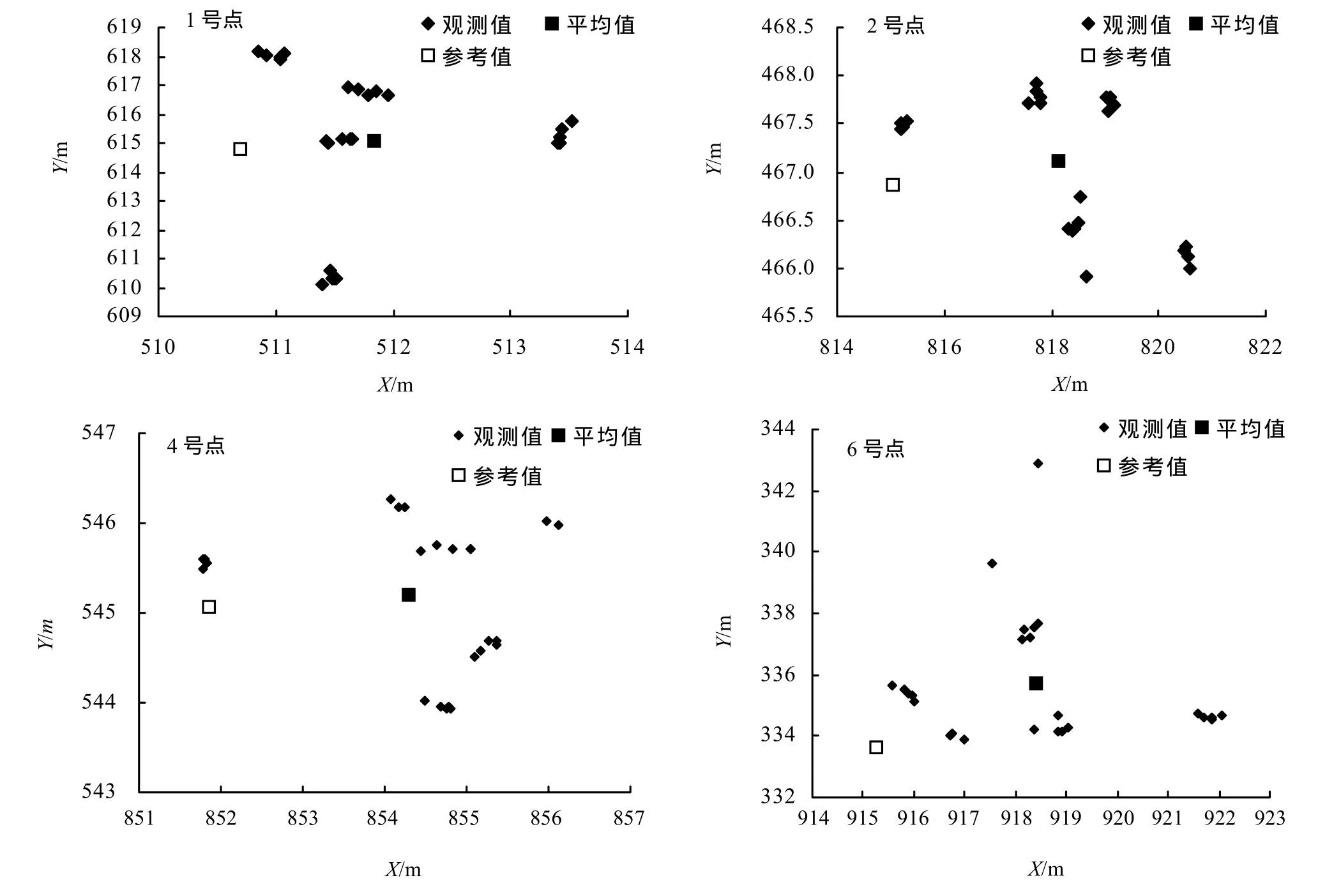
图1 单点定位4个试验点观测值分布Figure 1 Distribution of determined values from 4 SPP points
4 结论与讨论
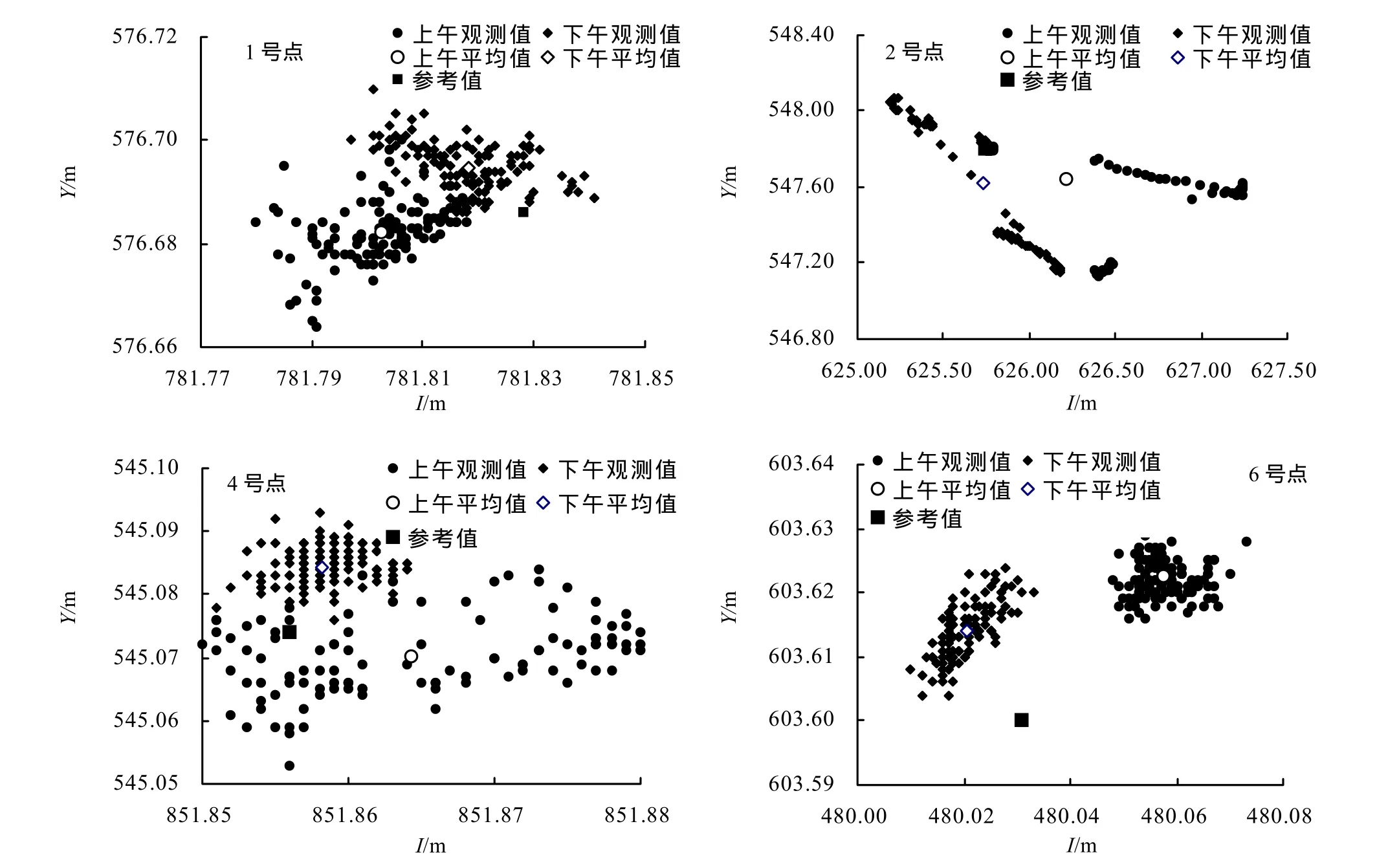
图2 GPS-RTK定位4个试验点观测值分布Figure 2 Distribution of determined values from 4 RTK
碎部测量中最常用的GPS测量形式是单点定位和RTK技术,单点定位精度较低,主要为林业工程、土地调查和野外导航等服务,而RTK技术普遍应用于多个工程领域,虽然常规RTK技术存在着自行架设基站的繁琐和误差相关性随着距离的增加而衰减等缺陷,而连续运行参考站系统(Continuously Operating Reference Stations,CORS)有效克服了常规RTK的不足,但在网络RTK还没有完全普及的今天,常规RTK仍然在诸多工程建设中发挥作用。本文通过试验检测高性能GPS接收机单点定位和常规RTK在林区周边多种地形中的定位特点,定量地分析了两种GPS测量形式的定位精度,同时,通过工程实践,总结RTK技术在林区测量的特点。
在林区周边不同地形中测量时,Trimble 5800 GPS接收机单点定位的内外符合精度为0.512 m ~ 4.465 m,受山体和建筑物的影响较大,在空旷区域可以达到分米级精度;RTK技术在观测条件较好时,平面中误差大多在1 cm以内,高程中误差为1 ~ 3 cm,上、下午两个时段定位精度相近;在郁闭度较高的林中观测精度较低,只有亚米级,高程精度更低,大多历元得不到固定解,在山谷等更恶劣的地形中,甚至得不到浮动解;水域附近的多路径效应对定位结果的影响小于建筑物对信号的阻挡作用。
由于在具体工程实践中,发现GPS在较高建筑物的墙角或较大树冠的树根底部很难得到固定解,因此本文试验中样点及其地形特征未模拟大树底、墙角边、大山谷等其他复杂地形。
[1]李征航,黄劲松. GPS测量与数据处理[M]. 武汉:武汉大学出版社,2005.
[2]张星炜,查勇. GPS单点定位误差分析[J]. 南京师大学报(自然科学版),2006,29(3):122-126.
[3]周科亮,冯仲科,张学培,毕华兴. 林地面积的手持GPS量测[J]. 测绘科学,2003,28(2):48-49,62.
[4]吉长东,乔仰文,王国清. 复杂条件下提高RTK观测高程精度的研究与分析[J]. 测绘通报,2005,(9):16-17,50.
[5]徐文兵,高飞,杜华强. 几种测量方法在森林资源调查中的应用与精度分析[J]. 浙江林学院学报,2009,26(1):132-136.
[6]张小明,高旭光. 浅谈GPS RTK测量技术的应用[J]. 合肥工业大学学报(自然科学版),2004,27(10):1341-1343.
[7]汪平,郝金明,沈国康,王浩宇. GPS单点定位观测值的精度分析与改进[J]. 大地测量与地球动力学,2009,29(3):142-144.
[8]余小龙,胡学奎. GPS RTK技术的优缺点及发展前景[J]. 测绘通报,2007,(10):39-41,44.
[9]吴秀丽,颜学功. RTK技术在工程应用中若干问题的探讨[J]. 测绘通报,2009,(1):51-53. (1):51-53.
猜你喜欢
测绘学报(2022年5期)2022-05-31
中国惯性技术学报(2020年2期)2020-07-24
全球定位系统(2019年4期)2019-08-30
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
导航定位学报(2016年4期)2017-01-05
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
