
一种新型的无变压器级联型多电平变换器拓扑
2011-07-25 07:05郑泽东李永东
电工技术学报 2011年8期
王 奎 郑泽东 李永东
(清华大学电机系电力系统及发电设备控制和仿真国家重点实验室 北京 100084)
1 引言
在高压大容量变频调速领域,多电平变换器由于在提高电压等级和减小输出谐波上的巨大优势,获得了越来越广泛的应用。虽然各种新拓扑结构层出不穷,但目前在工业上应用最多的多电平拓扑结构还是二极管钳位式和 H桥级联式结构[1-2]。二极管钳位式三电平结构在中压变频调速领域应用广泛,但受限于器件耐压等级,输出电压不能进一步提高。若采用更高电平的话,则存在电容电压难以平衡的问题。虽然采用背靠背结构或者增加外部均压电路能够控制电容电压的平衡[3-5],但结构复杂,钳位二极管数量也急剧增加。在高压变频调速领域,H桥级联式结构占有绝对的优势,不仅可以采用大量低电压等级的器件实现高压的输出,而且具有结构模块化强、使用器件最少、可靠性高、输入功率因数高、输出不需使用滤波器等优点。其不足之处是需要使用移相隔离变压器,而且电平数越多,需要的变压器二次绕组也越多。而多绕组移相变压器体积大,制造困难,成本也很高。
为解决移相变压器带来的H桥级联变换器的缺点,本文提出了一种新型的无变压器级联多电平变换器拓扑,它秉承了H桥级联结构模块化的优点,通过功率单元级联可以很容易地实现更高电平。最重要的是它的所有电容处于悬浮状态,可采用单一直流电源供电而不需要移相变压器,采用背靠背结构很容易实现四象限运行,这也是传统H桥级联结构难以做到的。该拓扑结构也可用于高压直流输电系统,此时整体结构稍有不同[6-8]。
2 新拓扑结构
在文献[4]中彭方正教授提出了一种多电平逆变器的通用拓扑结构,现有的多电平拓扑结构(如二极管钳位式,电容钳位式等)都能够从中派生而来,这给新拓扑结构的研究提供了一条重要的思路。遵循一定的规律和原则对通用拓扑进行简化可以得到许多新的拓扑[5,9]。文献[10]中也介绍了一种基于基本单元串-并(并-串)思想生成多电平变换器拓扑的方法,现有的多电平拓扑包括通用拓扑结构都可以通过基本单元先并后串或者先串后并的方法得到。本文提出的新型级联型多电平变换器拓扑正是由通用拓扑结构派生而来。如图1所示,图1a为五电平通用拓扑结构,只保留最外侧的基本单元(图中阴影部分)便可得到图1b所示新拓扑一,但该拓扑存在一些问题:第2级的两个基本单元由于电容直接串联并且内侧两个开关管和第 1级的电容并联,因此输出不独立,内侧两个开关管不能同时导通。如果将第2级的两个单元拆分,使其互相独立,可选择的开关状态更多,由此得到图1c所示新拓扑二。图1b的第一级和第二级还可以直接简化成二极管钳位型或电容钳位型三电平结构,如图 1d和图1e所示。从另外一个角度看,图 1d和图 1e相当于将图1c的中间基本单元由两电平结构扩展成三电平结构,这样在输出同样电平数的情况下使用元件更少。本文主要对新拓扑二展开研究,结果具有一定的通用性。其M电平桥臂结构如图2所示。
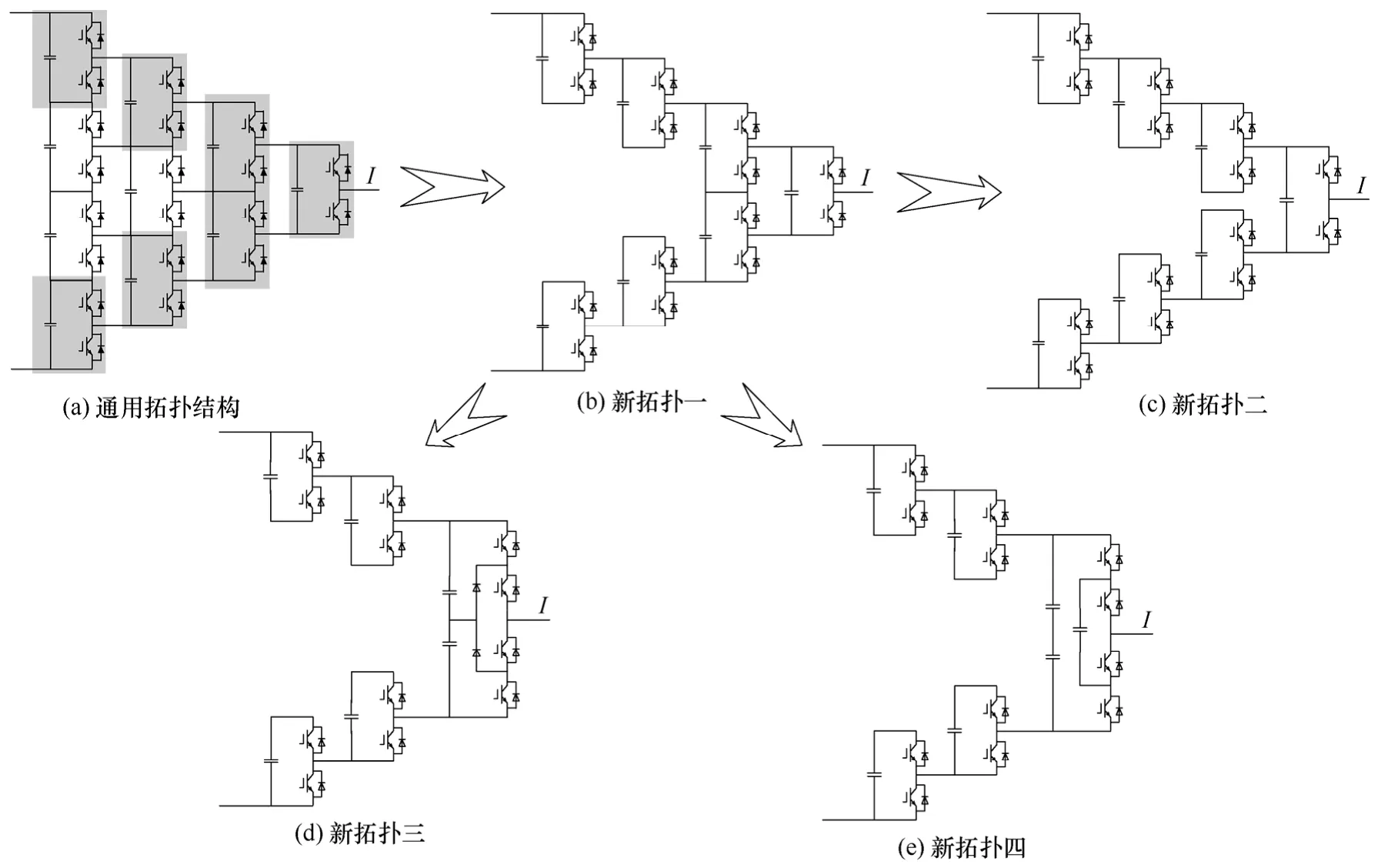
图1 通用多电平拓扑及其演化Fig.1 Generalized multilevel inverter topology and derived topologies

图2 新拓扑M电平桥臂结构Fig.2 M-level phase leg of the novel topology
由图 2可以看出,M电平新拓扑每相桥臂由2M-3个基本单元级联组成,可分成上桥臂、中间单元和下桥臂三个部分。上下桥臂分别由M-2个基本单元级联组成,每增加一个电平,只需上下桥臂各增加一个基本单元即可,结构简单,模块性强。
在通用多电平拓扑结构中,钳位器件为开关管和电容,其中每相桥臂最外侧开关管为主管,用来产生需要的电平,内侧开关管为钳位开关管,和钳位电容一起将每个器件电压钳位在一个电容电压的水平[4]。新拓扑结构在通用拓扑基础上作了简化,但也保留了一定的钳位开关管和钳位电容,其中最外侧的开关管为主管,内侧的开关管为钳位开关管,所有电容均为钳位电容。按照所需器件类型的不同,将新拓扑分别与二极管钳位型、电容钳位型、H桥级联型以及通用拓扑做一个比较,每相桥臂所需的器件数量见下表。
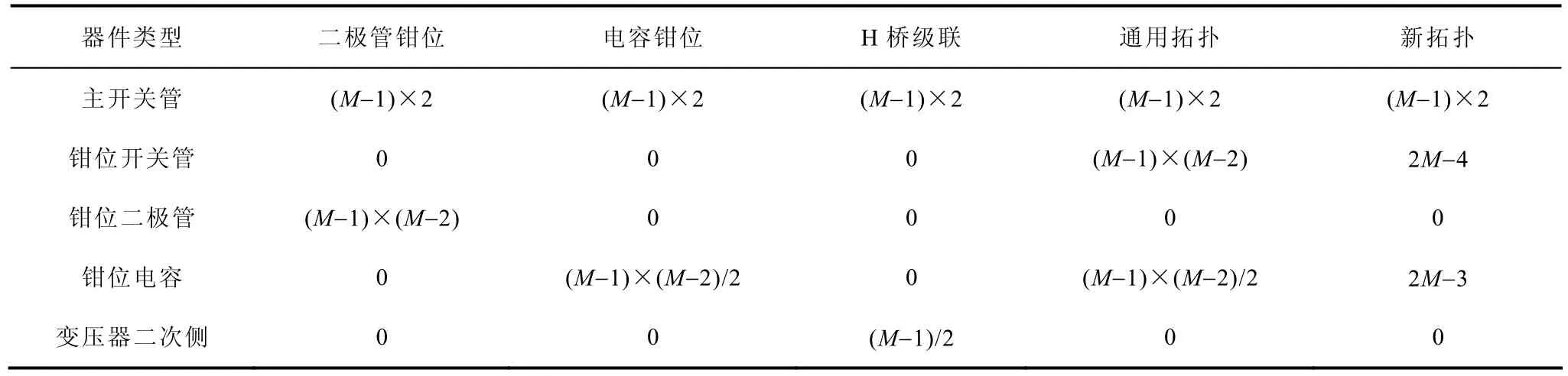
表 多电平结构每相所需器件数目比较(电平数为M)Tab. Devices required in different topologies (M-level)
由表1可以看出,各种拓扑结构使用的主开关管数量相同,只是钳位器件种类、数量不同。二极管钳位、电容钳位以及通用多电平拓扑使用的钳位器件(二极管、电容或开关管)都随着电平数M呈二次方快速增长,结构变得非常复杂,不适合更高电平的需求。H桥级联型结构虽然使用的器件最少,但需要特殊制造多绕组移相隔离变压器,当电平数增多时变压器二次绕组也增多,不仅制造困难,而且也增加了系统的体积和成本。新拓扑结构同时使用了钳位开关管以及钳位电容,但数量和M成正比,而且结构模块化,易于扩展,增加一个电平只需增加两个基本单元级联即可,既保留了H桥级联多电平变换器固有的优势,而且还省去了移相变压器,因此非常适合于电平数极多的场合。
新拓扑结构组成的三相逆变器结构框图如图 3所示。
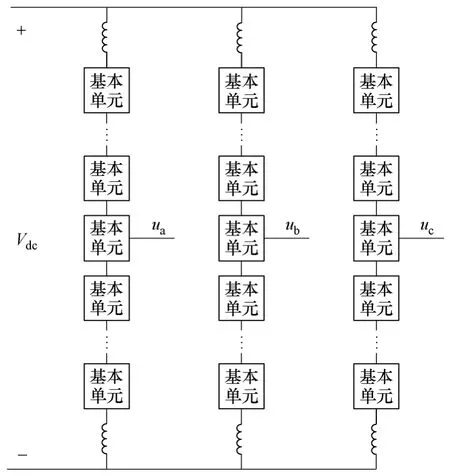
图3 新拓扑三相逆变器结构框图Fig.3 Structure of the 3-phase inverter of the new topology
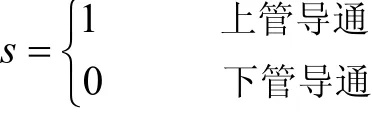
3 开关函数模型
在图2所示M电平结构中,设所有基本单元的电容电压相同均为VC,直流母线电压为udc。定义每个基本单元的开关函数为
为保证在每个开关时刻桥臂内部串联电容电压与母线电压相等,须满足

式中,upp1,up1n1,un1n分别为上桥臂、中间单元和下桥臂两端电压。
对于上桥臂的基本单元,开关函数为1时电容旁路;对于下桥臂的基本单元,开关函数为1时电容接入。因此有

可以得到

式中,sUi,sLi分别为上、下桥臂基本单元开关函数。
由式(3)可以看出,在任意时刻上桥臂开关函数之和与下桥臂开关函数之和相等,即上桥臂开关状态为1的基本单元数与下桥臂开关状态为1的基本单元数相等。
对于输出任意电平VO= nVC(n=0, 1,…,M-1),满足
由此可以得到
式中,sM为中间单元开关函数。
由式(6)可看出,对于任意电平输出,只需满足上桥臂或下桥臂开关函数与中间单元开关函数之和等于要输出的电平即可。
4 冗余开关状态以及电容电压平衡控制
基于以上两条原则,以图1c所示五电平新拓扑一相桥臂为例,讨论输出不同电平时可选的开关状态。由于上下桥臂所有基本单元都是独立的,相互之间输出电平互不影响,因此输出同一电平时有大量冗余开关状态可供选择。

(2)当VO=VC时,分为中间单元开关状态为0或1两种状态。
因此一共有10种开关状态。
(3)当VO= 2VC时,分为中间单元开关状态为0或1两种状态。
因此这种情况下一共有18种开关状态。
(4)当Vo= 3VC时,分为中间单元开关状态为0或1两种状态。
因此一共有10种开关状态。

由于冗余开关状态多,采用空间矢量 PWM调制时空间矢量的选取就比较复杂[6]。采用载波层叠PWM 调制策略时,电容电压平衡可以通过适当的控制算法实现。首先检测各个单元电容电压和桥臂电流大小,当电流方向为桥臂流向负载时,中间单元电容在sM= 1时放电,sM= 0时充电;上桥臂单元电容在sUi= 1时旁路,在sUi= 0时充电;下桥臂单元电容在sLi= 0时旁路,在sLi= 1时放电。当电流方向为负载流向桥臂时情况则正好相反。
以输出电压VO= 2VC以及电流方向为桥臂流向负载为例,若中间单元电压高于给定值,则控制sM=1使其放电,同时控制上桥臂电压最低和下桥臂电压最高的单元输出为 1。若中间单元电压低于给定值,则控制sM= 0使其充电,同时控制上桥臂电压最低的两个单元和下桥臂电压最高的两个单元输出为 1。这样,在每个开关时刻都能保证电压最高的电容放电和电压最低的电容充电,实现电容电压的动态平衡。
5 仿真和实验结果
为了验证新拓扑结构和控制算法的正确性,在仿真软件包 Matlab/Simulink平台上搭建了新拓扑结构的五电平模型并进行了仿真。所采用的参数为:电容容量C=1100μF,母线电压udc= 2000V,电容电压VC=500V,负载电流有效值Irms=20A。
图 4a为一相桥臂 7个悬浮电容电压波形,图4b为桥臂输出相电压波形,可以看出各个悬浮电容电压保持稳定且基本重合,输出相电压波形为五电平。图4c为三相电流波形。


图4 悬浮电容电压与相电压、电流仿真波形Fig.4 Simulation results
硬件实验平台以 TI公司最新推出的电机控制专用浮点DSP芯片TMS320F28335为控制器核心,功率器件采用IGBT。母线电压设置为100V,悬浮电容电压为25V。悬浮电容电压和桥臂输出相电压、相电流如图5a和图5b所示。受示波器通道数限制,图 5a中只给出了上下桥臂各一个基本单元电压和中间单元电压,平均值分别为 26.6V、25.0V和24.6V,其余悬浮电容电压用电压表监测也完全正常,都控制在25V左右。实验结果与仿真结果相吻合,悬浮电容电压基本实现了平衡控制。
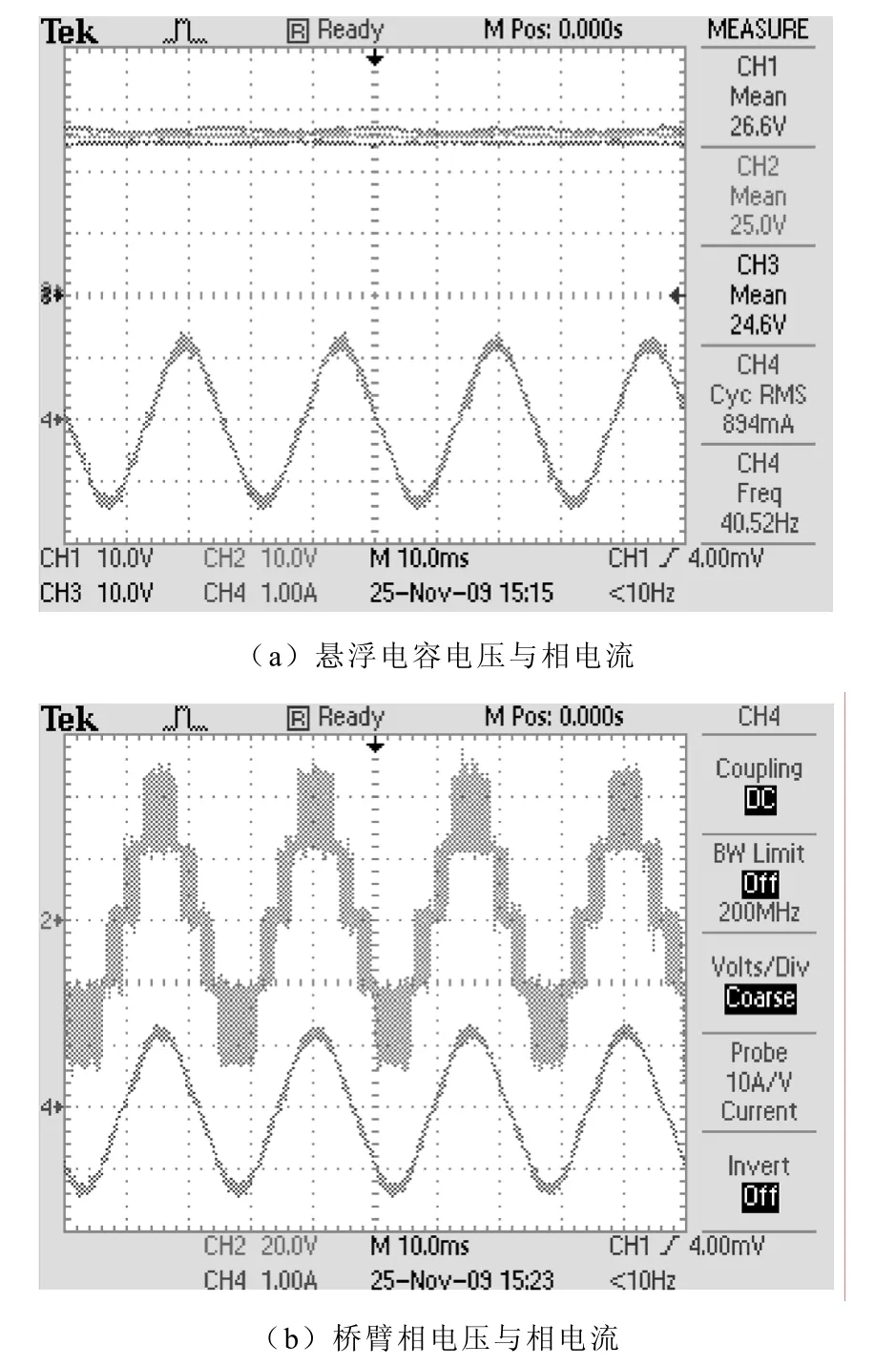
图5 悬浮电容电压与桥臂相电压、相电流实验波形Fig.5 Experimental results
6 结论
本文提出的无变压器级联型多电平新拓扑结构,不仅省去了传统H桥级联逆变器中的移相变压器,减小了系统的体积和成本,而且还具有模块性强,使用器件少,易于扩展等优点。本文研究了其工作原理以及开关状态确定方法,提出通过检测电容电压和电流方向选择合适的冗余开关状态可以实现悬浮电容电压平衡控制。该拓扑结构非常适合于高压大容量多电平变频驱动系统。
[1] Rodriguez J, Jih Sheng L, Peng Fangzheng.Multilevel inverters: a survey of topologies, controls,and applications [J]. IEEE Transactions on Industrial Electronics, 2002, 49(4): 724-738.
[2] Bernet S. Recent developments of high power converters for industry and traction applications [J].IEEE Transactions on Power Electronics, 2000, 15(6):1102-1117.
[3] Tolbert L M, Peng Fangzheng. Multilevel converters for large electric drives[C]. 13th Annual IEEE Applied Power Electronics Conference and Exposition, 1998, 2: 530-536.
[4] Peng Fangzheng. A generalized multilevel inverter topology with self voltage balancing[J]. IEEE Transactions on Industry Applications, 2001, 37(2):611-618.
[5] 李永东, 肖曦, 高跃. 大容量多电平变换器——原理·控制·应用[M]. 北京: 科学出版社, 2005.
[6] Lesnicar A, Marquardt R. A new modular voltage source inverter topology [C]. 10th European Conference on Power Electronics and Applications,2003.
[7] Marquardt R, Lesnicar A. New concept for high voltage–modular multilevel converter[C]. 35th Annual Power Electronics Specialists Conference.
[8] Allebrod S, Hamerski R, Marquardt R. New transformerless, scalable modular multilevel converters for HVDC-transmission[C]. 39th Annual Power Electronics Specialists Conference, 2008: 174-179.
[9] Wang Chenchen, Li Yongdong. A survey on topologies of multilevel converters and study of two novel topologies [C]. 6th International Power Electronics and Motion Control Conference, 2009:860-865.
[10] 陈阿莲, 何湘宁, 吴洪洋, 等. 基于基本单元串-并(并-串) 思想生成多电平变换器拓扑的方法[J]. 电工技术学报, 2004, 19(2): 41-46.Chen Alian, He Xiangning, Wu Hongyang, et al.Multilevel converter topologies based on seriesparallel and parallel-series connections of basic cells[J]. Transactions of China Electrotechnical Society, 2004, 19(2): 41-46.
猜你喜欢
地理教育·当代幼教(2019年11期)2019-09-10
山东工业技术(2019年22期)2019-08-26
中国实用神经疾病杂志(2018年9期)2018-05-25
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年4期)2016-04-04
电气传动(2015年4期)2015-07-11
电测与仪表(2015年2期)2015-04-09
电源学报(2015年6期)2015-02-18
中国医药导报(2015年20期)2015-01-11
电测与仪表(2014年18期)2014-04-04
