基于IRMCF341的无位置传感器异步电机控制系统的研究
2011-07-02 03:29张浩然
大电机技术 2011年4期
项 剑,张浩然
(浙江师范大学 数理与信息工程学院,浙江 金华 321004)
引言
异步电机相对于永磁同步电机具有机械坚固,制造简单,成本低,转动惯量较小,可靠性高,容易做到高转速、大容量等诸多优点,近年来在国防、农业生产和日常生活等方面获得越来越广泛的应用,对相应的电机控制器件的需求也与日俱增。
控制异步电机最常用的算法,是基于上世纪70年代初德国学者提出的感应电动机矢量控制思想的算法,在该算法中,除了要进行多次坐标变换与反变换外,还要进行电流以及速度的闭环控制,算法实现比较复杂而且实时性要求比较高,传统的工程应用中一般采用 DSP技术以软件的方式实现,这种方法的优点是比较灵活,但系统的开发周期比较长,开发人员一般要深入地了解诸多相关领域的知识(如:功率电子技术,电机特性及控制、软件算法、通讯以及硬件集成等),而且由于算法占用的处理器时间比较多,在某些情况下甚至不得不采用双DSP处理器,这就使得系统的整体性价比下降;另外,软件方式的通用性也存在问题,不同厂家的产品甚至同一产家的不同系列的DSP指令系统都不一样,这就使得用户的代码一般不可重用。这诸多的因素使得开发高性能的电机驱动系统成为一件复杂而且困难的事情,而节能的需要又迫使我们不得不进行相应的技术改进。
目前高性能电机驱动系统的发展趋势之一是逐渐摆脱软件的束缚,向纯硬件或半硬半软的方向发展,即用基于FPGA或ASIC的方式。在这种背景下,主要针对无传感器定位控制的永磁同步电机和交流异步电机而设计的高性能集成芯片IRMCF341应运而生。IRMCK34x系列电机驱动IC就是美国国际整流器公司推出的基于纯硬件控制的电机闭环控制ASIC。本文采用国际整流器公司(IR,International Rectifier)推出的IRMCF341电机控制芯片来实现电机的驱动,对异步电机控制系统进行了研究和开发。
1 无位置传感器异步电机控制
无位置传感器的矢量控制方式是基于磁场定向控制理论发展而来的,它的研究始于20 世纪80年代末。近年来,国内外的许多研究机构对异步电机的无位置传感器控制技术进行了更为深入的研究。无位置传感器异步电机控制的关键在于:如何根据测量电机电流或电压信号得到转子位置和转速信号。目前无位置传感器电机控制主要有以下几种方法:磁链位置估计法、反电动势法、模型参考位置估计法、基于状态观测器的位置估算、基于卡尔曼滤波的无传感器方法。
本文采用的IRMCF341芯片是根据反电动势估算转子位置,转子位置估算包含磁链观测(flux estimator)和角度-频率生成(Angle-Frequency generator)。电机转子磁场产生的励磁分量通过磁链观测器计算。磁链观测器的基本原理就是对电机的反电动势电压积分。角度-频率生成器则是通过磁链输入计算位置和频率,最终得到转子角度。其相应的结构原理框图如图1所示首先,IRMCF341从单电阻采样上获得直流母线电流信号,紧接着将该电流信号进行重构,得到U、V、W三相电流,然后经过Clark变换(3相到2相),电流解耦,矢量旋转(正向和反向)等,最终得到空间矢量控制算法所需的量。由于此过程的操作IRMCF341是使用模块化的MatLab/SimulinK环境下mdl文件来实现,因此我们所要完成的是对这一过程中涉及的参数进行设置即可,这一机制也极大方便了用户的开发。
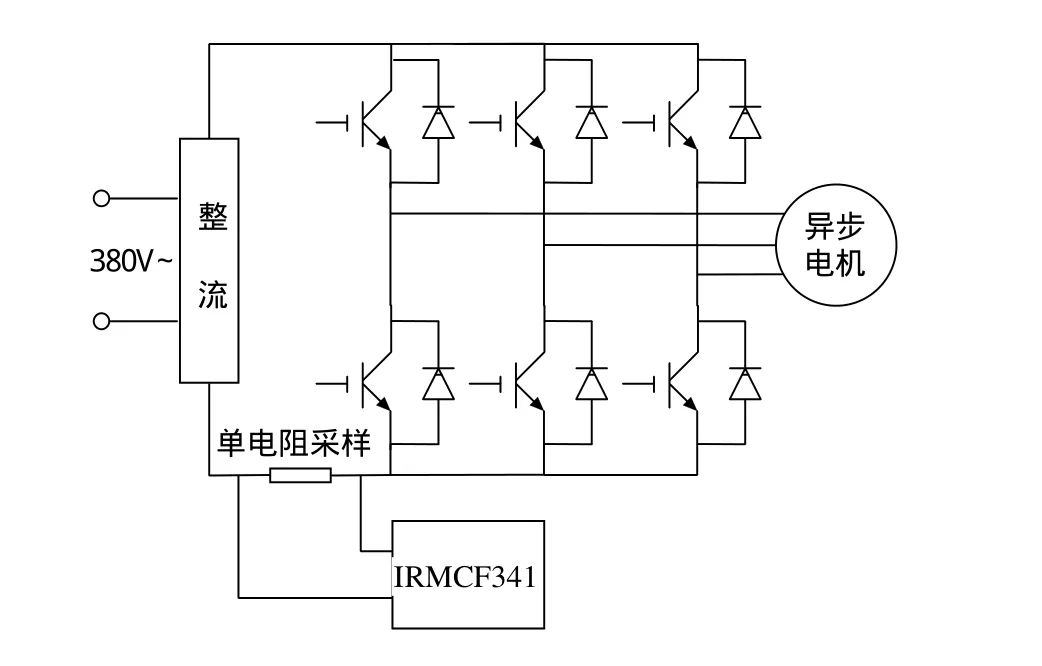
图1
2 IRMCF341芯片功能简介
IRMCF300系列产品是国际整流器公司推出的集成电路器件,主要针对应用于电机控制的逆变器的单芯片解决方案。该系列包括 IRMCF312, IRMCF311,IRMCF343, IRMCF341和IRMCF371。IRMCF341芯片具有一大特点:在一块芯片上集成了两个内核,分别是用于无位置传感器电机控制的MCE(电机运动控制引擎)核和高速8位增强型微处理器8051核。其原理框图如图2所示。
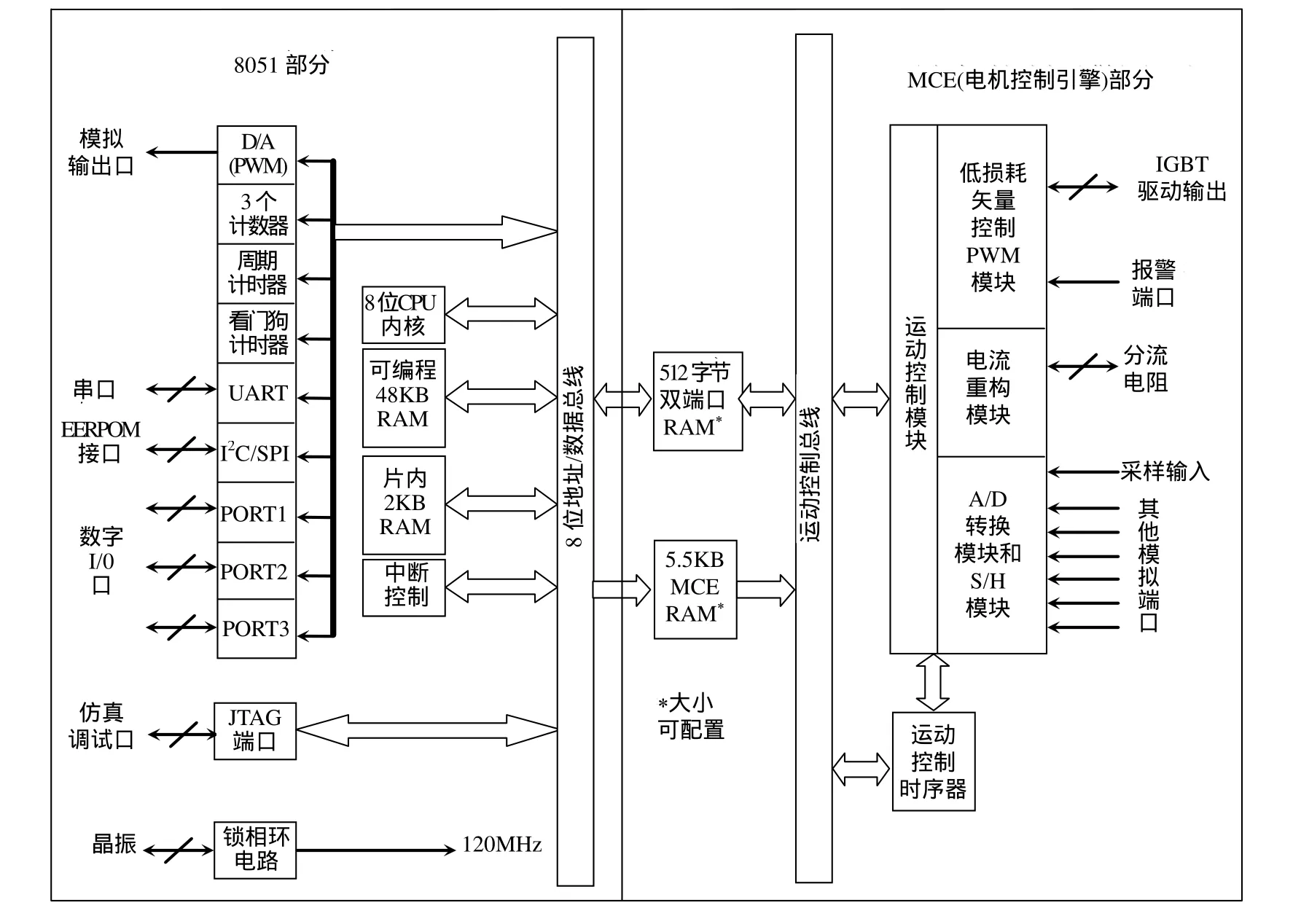
图2
电机控制引擎是硬件模块的集合——这些模块是完成电机高性能无传感器正弦波控制所必须的。电机控制引擎由电机接口模块(Motion peripherals)和控制模块(Control Blocks)组成。电机接口模块是用于处理模拟和数字信号,以及与外部的接口——IRMCF341器件外部。除了控制电机运动的 MCE核之外,IRMCF341还具有一个增强型的8051核。IRMCF341 8051微处理器其指令设置和基本操作与标准的因特尔8051处理器一致,而且还增加了许多外设和专用功能。
3 系统构成和控制策略
3.1 系统的硬件实现
电机控制系统的结构如图3所示。整个系统采用交-直-交变压变频电路。主电路由整流模块、逆变模块、驱动电路、电压电流检测电路及其他外围电路组成。控制电路以IRMCF341芯片为核心,配合外围电路构成无位置传感器异步电机控制电路。在该系统中,控制核心IRMCF341通过A/D口接受来自单电阻电流采样到的电流信息,此电流经 RC电路转换成适合的电压信号输给IRMCF341的A/D口。IR公司的IRMCx300系列产品拥有至少一个通用模拟输入和一个用于直流母线检测的模拟输入。每个通道的转换时间最大为 2.0微秒。与传统微处理器的A/D转换不同,转换过程、采样/保持时序和多路转换器由内部的硬件逻辑自动控制。这是由于事实上针对单电阻电流反馈有一路专门的模拟信号输入,它要求特殊的采样/保持时序。

图3
3.2 系统的软件实现
由于运动控制算法的图形化,使软件编程更易于操作,使用 MCE编译器,可以使设计人员利用MATLAB’s Simulink图形用户接口方便地实现一个设计。电机控制模块由国际整流器公司以Simulink库的方式提供,他们描述了IRMCF341的可用功能。
MCE开发环境包含下面几个部分:
(1)图形化的 Simulink控制模块库,用于设计一个电机控制系统。
(2)MCE编译器。用于分析Simulink设计,并生成相应的IRMCx31x MCE处理器的可执行文件。
(3)MCEDesigner,为IRMCx3xx提供图形化的用户接口,以便下载 MCE执行文件,控制 MCE操作,分析系统功能和特性。
MCEDesigner是支持IRMCF341在线仿真软件,通过该软件,可以直接对电机进行直观化的操作,包括程序的初始化、保护电路的自检、整个系统参数配置、正反转设定子程序、判断电机起动和停止、运行时升降速等。
MCE的设计层次格式如图4所示。
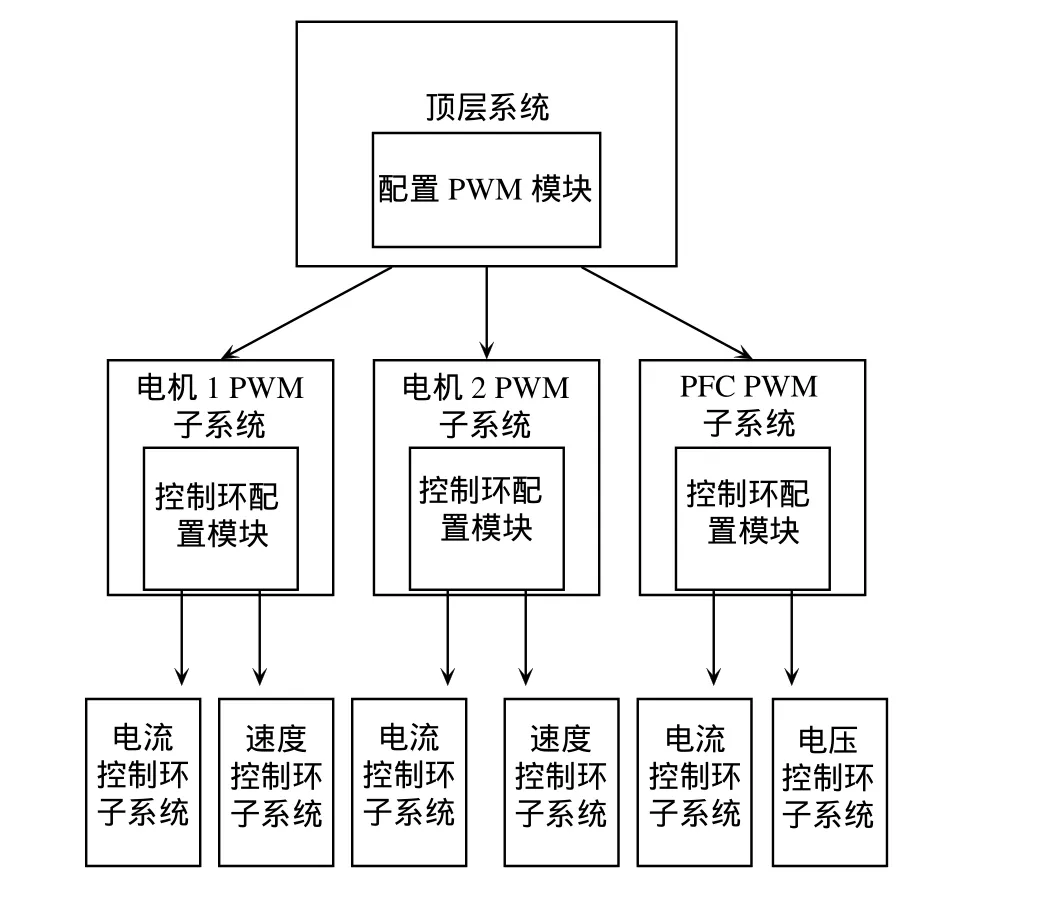
图4
3.3 系统矢量控制方法的实现
本文采用的是转子磁场定向的矢量控制算法,该算法已包含在 MCE库内,即定子绕组在α~β坐标系的空间矢量定义为:

对于三相平衡系统,零序电流分量为零,因此可得


可以得到由静止坐标到旋转坐标的变换(Park变换)方程

由旋转坐标到静止坐标的变换(Park逆变换)方程

4 试验结果
本试验在 750W 无刷异步电机上实现,输入电压380V~400V三相交流电,额定电流2.1A,驱动芯片采用 IR2233,逆变电路 IGBT采用西门康SK15DGDL126ET,板上弱电电压由380V交流电整流后经开关电源提供。
图5、图 6、图 7是现场测试采集波形,由MCEDesigner提供的示波器功能采集。图5是采集反馈电流后进行重构的V相、W相波形,由图中可看出其非常近似正弦波,这是整套算法的第一步,也是关键一步,只有做好这一步才能保证无位置传感器电机控制的精确性。图6是设定速度与电机实际速度波形,从图中可以看出,电机波形一开始有一定的上冲(这是由于启动阶段输入较大的电流,更改比例积分值可将这个过冲缓解)经过一个短暂的时间,速度稳定在设定值。图7是不断改变设定速度值与电机实际跟踪的波形,可以看出,当设定速度值发生改变的时,电机能够马上作出反应,改变当前值以达到设定值。
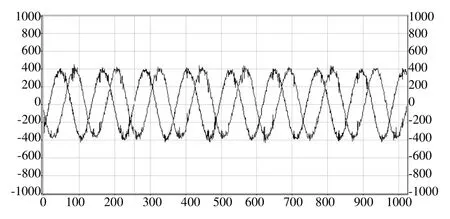
图5
5 结语
本文采用了IR公司的双核芯片IRMCF341与西门康公司的 IGBT组成的控制系统作为硬件基础,在只采样负母线电流的基础上实现了异步电机无位置传感器的控制。此方法简化了电机控制过程,大大缩短了开发周期,为节约开发成本,并为最终设计实际应用产品提供了条件。

图6

图7
[1]李永东, 等. 交流电机数字控制系统[M]. 北京:机械工业出版社, 2002.
[2]冯垛生,曾岳南. 无位置传感器矢量控制原理与实践[M]. 北京: 机械工业出版社, 1997.
[3]宋萍,沈传文. 基于无位置传感器的永磁电动机在变频空调中应用的研究进展[J]. 暖通空调,2005.
[4]周立功. 增强型80C51单片机速成与实战[M]. 北京:北京航空航天大学出版社, 2003.
猜你喜欢
环球时报(2022-09-29)2022-09-29
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
军民两用技术与产品(2021年12期)2021-03-09
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
湖北工业大学学报(2016年5期)2016-02-27
组合机床与自动化加工技术(2014年10期)2014-03-01