膀胱肿瘤恒温热灌注治疗模拟设备的控制实验研究
2011-07-02 01:13:58朱学峰王秀肖术骏林云莉赵雪竹
自动化与信息工程 2011年1期
朱学峰 王秀 肖术骏 林云莉 赵雪竹
(华南理工大学自动化科学与工程学院)
膀胱肿瘤恒温热灌注治疗模拟设备的控制实验研究
朱学峰 王秀 肖术骏 林云莉 赵雪竹
(华南理工大学自动化科学与工程学院)
众所周知,对实际被控对象的模型辨识是进行良好控制的重要前提。本论文研究了一种开环辨识方法。被辨识的对象是膀胱恒温热灌注治疗仪模拟设备,对该对象进行了开环飞升曲线测试,根据记录的输出曲线,采用改进的面积法对被控过程的一阶惯性加时滞模型进行参数估计,得到被控对象的传递函数。然后,根据所得到的过程模型,进行PID参数整定并进行了闭环的控制试验。实验表明,此方法具有较好的辨识精度,对测量噪声不敏感,闭环控制实验也表明了该控制系统的可行性。
热灌注治疗;开环实验;模型辨识;参数整定;闭环控制
1 引言
膀胱癌发生率在美国、欧洲和我国男性中分别列第4、5、10位,年新增病例仅美国就超过了60000例[1],是常见的恶性肿瘤之一。大多数浅表性膀胱癌可经尿道膀胱肿瘤切除术(TURBT)治愈,但仍有50%~70%的浅表性膀胱癌在术后1年内出现复发,60%~90%在3~5年内出现复发。对于肿瘤的治疗,除传统的手术切除、放射治疗及化疗外,肿瘤的加温治疗(简称热疗)是生物医学工程界最有发展前景的新疗法之一。因此,辅助性治疗对膀胱癌患者具有极为重要的作用,术后施行膀胱灌注治疗是预防复发的有效手段。
实验证明:不少肿瘤内的血流仅为正常血流量的2%~15%,肿瘤组织的血流大大少于正常组织,高温能选择性破坏肿瘤。在41℃~43℃范围内,癌细胞对热的敏感性远比正常细胞为高。本课题针对膀胱肿瘤的治疗,研制可同时进行化疗与热疗的恒温热灌注治疗仪。通过对化疗液流体介质加热,提高病灶组织温度,对病人进行循环式化疗液灌注治疗,不仅可直接杀伤肿瘤细胞或触发其凋亡,还可扩张肿瘤组织的血管、增加化疗药的膜通透性、提高肿瘤细胞胞浆中药物的浓度、逆转某些化疗药物的多药耐药等,同时还减轻病人生理不适与经济负担。
为了能开发、设计出精确控制化疗液温度的治疗仪,我们建立了一套模拟实验系统,并进行了相应的建模和控制实验,为今后开发、设计出正式样机打下坚实的基础。
2 模拟热灌注治疗仪的描述
为进行膀胱肿瘤恒温热灌注治疗,我们先进行模拟实验。其模拟试验设备如图1所示。

图1膀胱肿瘤恒温热灌注治疗仪的实验平台原理图
试验中,人造膀胱(在初步实验中,该人工膀胱先用一个塑料瓶替代)置于37℃恒温水浴中,治疗液通过三腔管进入膀胱,再由三腔管流出进行循环控制。循环速度用蠕动泵调节,在初步试验中,流量设定在25转/min。热电阻T3用于测量人造膀胱内的温度,并将其信号输入PID控制器,控制器的设定值一般为42℃~43℃(最佳治疗温度)。PID控制器的输出是固态继电器(SSR)的导通角大小,固态继电器串联在连接加热管的电源线中,当控制器的输出变大时,继电器的导通角变大,加热管在一个周期内和电源接通的时间变长,流过加热管的水温就会相应增高;当输出变小时,则温度降低,以此来达到控制的目的。膀胱的进水温度T2和膀胱内温度T3都输入到无纸记录仪中进行记录。实验系统的加热管是特殊加工订制的,其加热可以用交流或直流供电。
3 对象模型的辨识
为了能精确获取对象的特性,设计了相应的控制系统并对系统进行了开环飞升曲线的测试。在系统稳定时,对被控对象的输入(PID控制器的手动输出)做阶跃变化,记录相应T3温度的变化曲线,就可以通过数据处理,得到被控对象的数学模型。
3.1 辨识原理
一般而言,工业过程大多可以用一阶惯性加纯滞后模型来近似:

对于上述模型,文献[1]提出,从稳态的输出和输入的幅值来获得K,响应曲线中有最大斜率点的横坐标作为L,从时滞L到曲线上升到0.63K之间的时间为T,这是一种最简单的数据处理方法,但在过程噪音比较大的情况下,辨识精度有限。
两点法的K值如上所述,T和L值通过t1=0.28K和t2=0.63K的值经过数值计算[2,7],该方法也比较简易,但是对测量的噪声也很敏感。
文献[3]提出的面积法对于噪声信号不敏感,但是面积法的辨识精度主要依靠一个面积数值,为提高准确性,保证系统进入下一个稳态,所以测试的时间必须足够长。
在Qiang Bi等人的研究基础[4-5]上,我们采用一种对噪声不敏感,且测试不需要必须达到下一个稳态值的方法。该法具体做法如下:首先使系统处于稳态,然后,输入阶跃信号u(t)=h,直到系统进入下一个稳态,记录相应的输入u(t)和输出y(t)的值。对于上述式(1)描述的过程,得输出为:

其中w(t)是测量噪声。从t=0到t=τ(τ≥L)对y(t)积分的推导结果为三项之和:
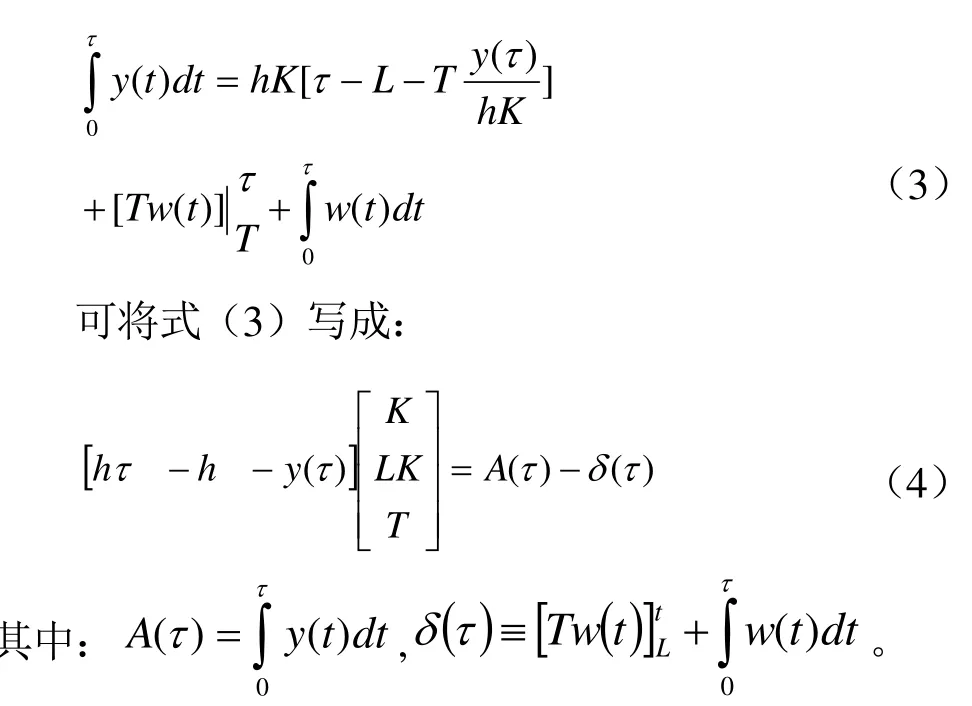
方程(4)还可以写成以下矩阵方程:

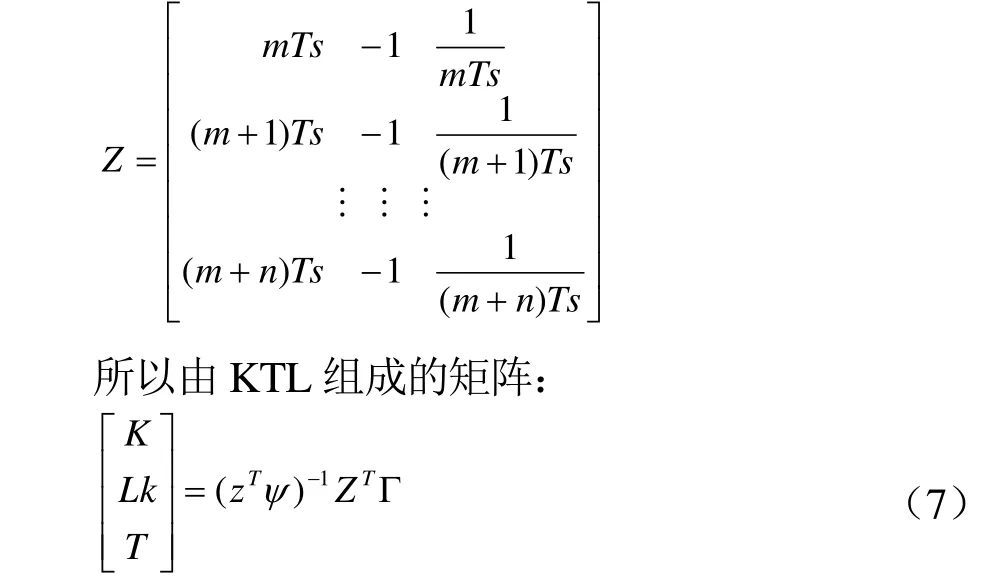
Ts是采样时间且mTs≥L。n为采样次数。由KTL组成的矩阵θ可通过下式得到:

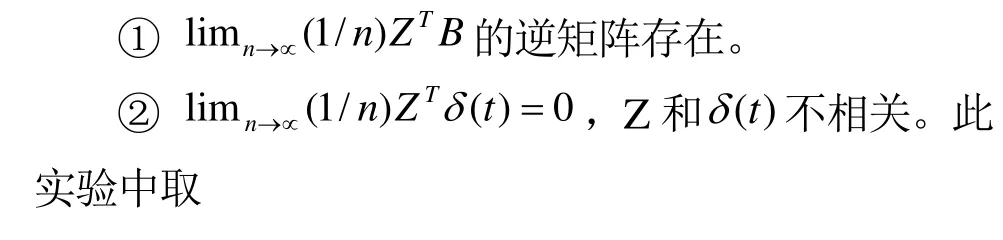
上述估计是在δ(τ)为均值白噪声的基础上得到的,但是在实际工业应用中,大部分噪声是均值相关的。一个解决的办法是选取一个合适的矩阵Z来代替Ψ,Z需要满足:
3.2 治疗仪模型辨识
根据上述辨识原理,对治疗仪进行开环控制,即控制手动输出为30(满量程为100)使系统达到稳态后,再手动改变输出至55,即被控对象输入为u(t)=0.25。相应地,T3温度由38.6°升至41.6°,记录被控对象的输出值数据并进行辨识:mTs≥L的时刻各值,组成Z,ψ,Γ矩阵的第一行。第i时刻时,A[(m+i)Ts]是mTs到(m+i)Ts之间y(s)的累加和。组成n行矩阵后,以(7)进行计算,得到K,T,L的值。辨识得到其传递函数为:

根据辨识得到的K,T,L值计算其开环响应,与实验测取的开怀响应曲线的比较如图2所示。点划线为无纸记录仪记录的数据,虚线为进行辨识得到对象模型的输出曲线。
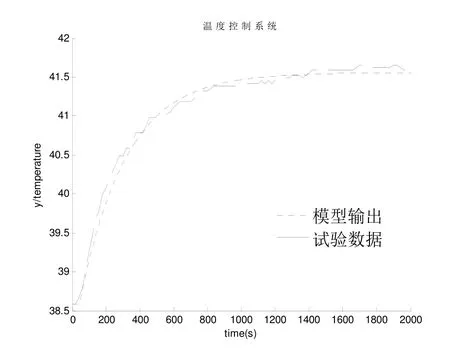
图2 过程模型辨识结果
由图2可以看出,辨识模型的输出与实际输出是十分接近的。更重要的是,试验数据记录n值相应小幅度变小时,辨识结果没有受到太大的影响,例如,对此实验分别取n值为1600,1800,2000个采样点时,辨识结果几乎相同。
4 PID控制实验
有了辨识结果,就可以进行PID参数的整定。这里根据PID整定规则[6-8]计算选取Kp=0.1809,Ki=0.0011。但在实际控制中还要对PID参数进行微调。以下,对该控制系统进行了抗干扰性能实验:
(1)加热电压的干扰。加热管的给定电压为75V,给予20%的干扰,即电压由75V调到90V,再调回75V后的干扰试验结果如图3所示。

图3 电压干扰下的控制试验
(2)流量变化干扰。在稳态时,蠕动泵的转速为25转/min,给予20%的干扰,即转速由25转/min调到30转/min,再调回25转/min的干扰试验结果如图4所示。
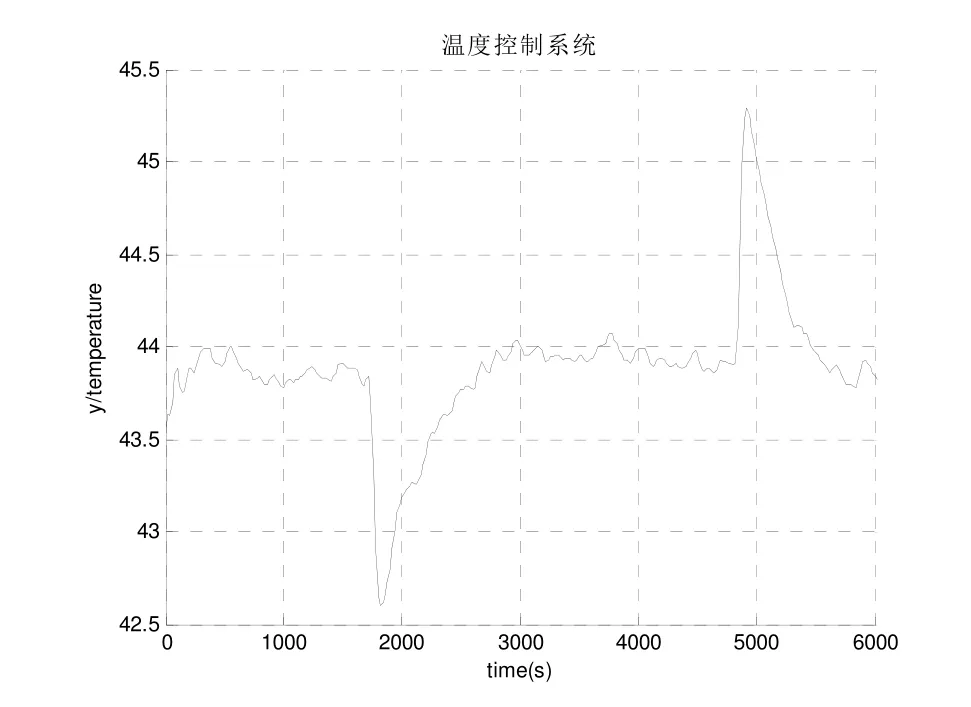
图4 流量干扰下的控制试验
5 结论
本文采用了基于阶跃响应的改进辨识方法来进行实际对象的辨识,此辨识方法比常规的一点法、两点法要准确很多,并对噪声不敏感,计算也比较简单,对膀胱肿瘤恒温热灌注治疗模拟设备的辨识实验证明,该方法是准确、可靠的。下一步,我们将进行动物(猪)的膀胱的辨识与控制实验。
[1] Astrom,K.J.,Hagglund,T. PID controllers:theory, design and tuning[M]. Instrument Society of America.1995.
[2] Marlin,T.E. Process control disigning processes and control system for dynamic performance[M].New York:McGraw-Hill. 1995.
[3] Rake,H. Step response and frequency response method[J]. Automatica.1980(16):519-526.
[4] Qiang Bi, Wen-Jian Cai,Eng-Lock lee,QGW, CCH,YZ. Robust identification of first-order plus dead-time model from step response[J]. Control Engineering Practice.1999(7)71-77.
[5] 李少远,蔡文剑,工业过程辨识与控制[M].化学工业出版社,北京,2005.
[6] 王凌,唐芳.基于遗传退火策略的PID整定研究[J].化工自动化及仪表.2002,29(3):21-24.
[7] 胡晚霞,余玲玲,戴义保.PID控制器参数快速整定新方法[J].工业仪表与自动化装置.1996(5):11-17.
[8] Wang,Q.G., Lee,T.H., Fung, H.W., Bi,Q. PID tuning for improved performance[J]. IEEE Trans. On Control Systems Technol. 1999(7):457-465.
The Experimental Control Research on a Simulated Facility with Constant Temperature Hyperthermic Perfusion Treatment on Bladder Cancer
Zhu Xuefeng Wang Xiu Xiao Shujun Lin Yunli Zhao Xuezhu
(South China University of Technology, College of Automation Science and Engineering)
As well known, process identification is very important in process control. A Open-loop identification method is proposed in this paper. The identification object is a simulated facility with constant temperature hyperthermic perfusion treatment on bladder cancer. Open-loop step response is applied ,the process input and the resulted output response are logged, and the improved area method is adopted, from which the parameters of a first-order plus dead-time model can be estimated. Based on some PID tuning rule the closed loop experiments have been conducted. The experimental results have shown that the proposed method has good identification accuracy and is insensitive to the noise. Furthermore, the experiments of the closed loop control system have also indicated the design closed loop control system is valid.
Hyperthermic Perfusion Treatment; Open-loop Control; Model Identification; Parameter Tuning; Closed Loop Control
朱学峰,男,1940年出生,华南理工大学自动化学院教授、博导,主要研究方向:工业过程的建模与智能控制,软测量技术与应用,图像处理与应用
王秀,女,1985年生,硕士,研究方向:智能控制与应用,图像处理与应用。
肖术骏,男,1985年生,硕士,研究方向:智能控制与应用,工业过程辨识。
致谢:本论文的实验系统与相关实验是根据广州市第一人民医院泌尿科主任钟惟德教授的想法进行设计的,在此表示衷心的感谢。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19 13:52:08
现代仪器与医疗(2021年4期)2021-11-05 08:25:24
河北农机(2020年10期)2020-12-14 03:13:42
河北省科学院学报(2020年4期)2020-03-19 02:02:40
机电工程技术(2018年10期)2018-12-06 02:26:38
大陆桥视野·下(2017年11期)2017-10-31 11:02:24
儿童故事画报·发现号趣味百科(2017年3期)2017-06-30 00:13:58
电子制作(2017年24期)2017-02-02 07:14:16
长江大学学报(自科版)(2014年4期)2014-03-20 13:20:37