船舶完整稳性及抗沉性实时监控系统的研究
2011-06-30 10:46:50陈恒强池海峰
江苏船舶 2011年3期
陈恒强,池海峰
(中国船级社镇江办事处,江苏 镇江 212008)
0 引言
船舶抗沉性,又称不沉性,是指船舶在一舱或相邻多舱破损进水后,仍能保持一定的浮性和稳性的能力[1];是关系到船舶安全的一个重要性能。船舶具有良好的抗沉性,标志船舱进水后仍能保持漂浮在水面上并能保持船舶良好的操纵性。
目前,破舱稳性的计算基本上全部是电算法进行,能够计算(或部分计算)破舱稳性的软件,主要有 NAPA、Tribon、Damcargo等[2],只是在船舶初步设计中选择几种破舱状态,进行破舱稳性预算。而船舶实际航行中,破舱进水的状态具有不确定性等特点。目前船舶装载仪软件能够计算破舱后的稳性及浮态参数[3],但是该系统只是进行预先选择的整舱破损的稳性计算。本系统是利用高精度液位测量仪[5],对破舱进水后的船首、船尾、船中吃水值及各破损舱室进水情况进行实时测量后,自动进行破舱稳性的实时计算;若此时受到定值阵风风力横向作用,也可以进行稳性的实时衡准,通过改变航区或者调整压载水的方法来保证船舶的安全航行。
1 系统整体组成框图
本系统主要由船舶液位测量仪、传感器、上位机(计算软件)等组成。系统结构图如图1所示,图中,1为船壳;2、3、5分别为首、中、尾吃水传感器;4为液舱(或破损舱室)吃水传感器;6为信号电缆。
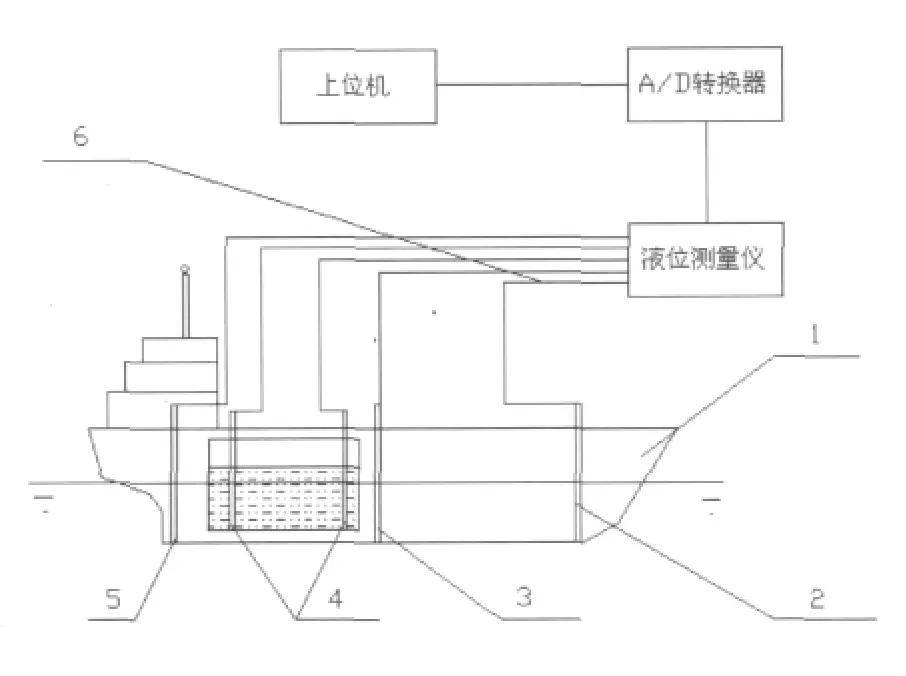
图1 系统整体组成框图
2 系统主要硬件结构
2.1 液位测量仪
液位测量仪采用时域脉冲反射技术。其组成部件有:传感器、信号发生器、信号控制电路、A/D转换器、微处理器等。通过发射与接收脉冲信号之间的时间差,得到液位精确的高度。
2.2 A/D转换器选择应用
本系统选用USB2.0数据采集板,相对于PCI、ISA、USB等接口形式,且可以对外提供2.5 W的电源,不需要外部供电。其平均数据传输速度为38 MB/S,满足本系统的技术要求。
3 软件系统结构
整个软件系统,以Windows XP为操作平台,Borland Delphi6.0为开发工具,Table Server作为数据库引擎(DE)[6]。基于TDR的船舶完整稳性及抗沉性实时监控系统中的软件系统流程框图见图2。
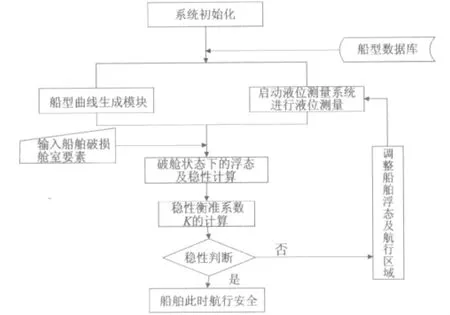
图2 软件系统流程图
4 系统功能组成
本系统针对选定船型进行设计开发,主要包含以下几个功能模块。
4.1 液位测量系统模块
脉冲发射法液位测量系统可以满足船舶液位测量测点多、传感器灵敏度高、误差小、体积小、易安装、抗静电抗干扰能力强等要求[7];利用时域脉冲发射技术已设计的船舶液位测量系统,测量绝对误差 ±1 mm,结构简单安全,精度高,测量范围最大为15 m,可靠性强;故本系统采用时域脉冲发射法的船舶液位测量系统。
利用此高精度的液位测量仪,实时测得的船舶在破舱状态下的首吃水dF,尾吃水dA,船中左舷吃水dL,船中右舷吃水dR值及进水舱室液位高度的情况,动态显示船舶在各种破损状态下和航行时的船舶姿态参数。
4.2 船型曲线模块
根据船体型值表计算并显示船型曲线,主要包括:静水力曲线、邦戎曲线、符拉索夫曲线、静稳性曲线、动稳性曲线。运用数值积分法进行计算,并列成相应的表格形式进行自动计算。
4.3 破舱状态下的浮态及稳性计算模块
根据液位测量仪实时测得的船舶破损浮态下的部分浮态参数:dF、dA、dL、dR,并动态计算、视屏显示该状态下船舶的浮态及稳性参数。破舱稳性计算模块分为:第一类舱室进水,第二类舱室进水,第三类舱室进水三种。前两类的浮态及稳性计算理论采用增加重量法较方便,第二类是在第一类的计算基础上加上自由液面对稳性的影响;第三种的采用损失浮力法较简单。因为第三类舱室进水后对于船舶浮态和稳性的影响最坏,现以第三类舱室进水状态为例,加以方法简述:根据上述的dF、dA,先计算出各站的船中吃水dMi,再根据横倾角计算出各站的左右舷吃水dLi、dRi,代入符拉索夫曲线中,插值计算出各站的横剖面一半的面积ASx,以及此面积对中线面 Mxoz、基平面的静矩 Mxoy后,根据计算公式[8]:
在程序中运用二维数组进行插值得出Asx、Mxoz、Mxoy,然后运用数值积分法进行计算得出上述浮态参数,并列成相应的表格形式进行计算。
4.4 破舱状态下的稳性衡准模块
该模块的功能是:根据上述船舶破损进水状态下的浮态及稳性参数的实时计算结果,如横倾角Φ已知,在给定定值阵风风力F横向作用下,运用稳性衡准系数法对船舶破舱稳性进行衡准,实现船舶在破舱进水后,且受到定值阵风风力横向作用下的稳性实时衡准;当稳性不满足时,可以改变航区或者调整压载水保证船舶的安全航行。如算例中的稳性调整就是将航区从远海航区改为近海航区即满足稳性要求。衡准前先求出最小倾覆力臂和风压倾斜力臂,前者可通过动稳性曲线插值取得,后者根据风压倾斜力臂公式[1]算得。两者之比即为稳性衡准系数K,应符合下式要求:K≥1,表示风压倾斜力矩小于使船舶倾覆所必须的最小倾覆力矩(至多是相等),所以船舶不至于倾覆,因而认为具有足够的稳性,即航行安全。
5 具体算例
本算例选用某12300 t滚装船作为研究对象,船舶主要量度:

针对此滚装船开发设计的船舶完整稳性及抗沉性实时监控系统的主界面,如图3所示。
船舶破舱状态下的浮态及稳性计算结果输出,如图4所示。
船舶破舱状态下的稳性衡准及稳性调整结果,如图5所示。计算风压[9]可由公式 p=0.7356V2算得,其中P为风压,V为风速。
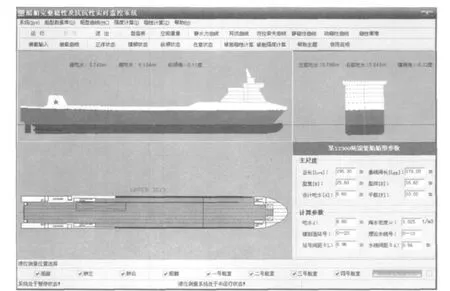
图3 完整稳性及抗沉性实时监控系统主界面
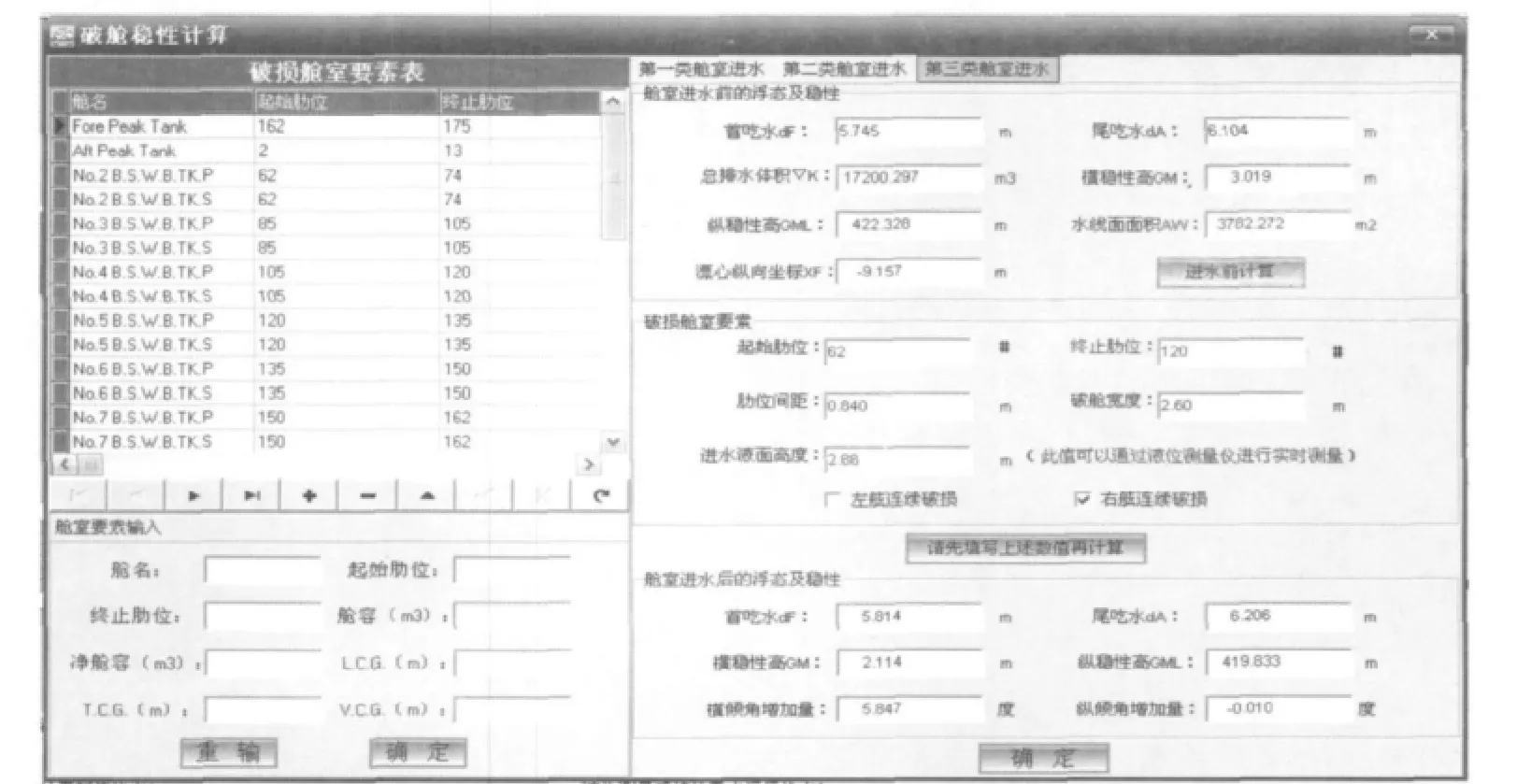
图4 第三类舱室破损后的浮态及稳性计算结果视屏输出
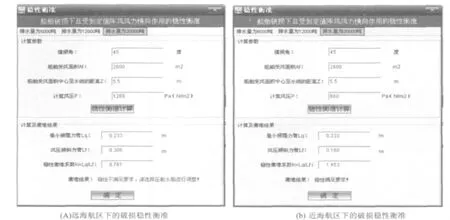
图5 破损稳性衡准
6 结语
通过对船舶完整稳性及抗沉性计算的分析研究,结合液位测量仪,开发了船舶完整稳性及抗沉性实时监控系统的软件。该软件具有界面友好、人机交互性良好、资料性强、计算速度快、易于船舶在实际航行中不确定破损状态的稳性实时监控,也可以用于船舶初步设计的破舱稳性预算。本系统可通过对大型船舶的装载及航行姿态进行实时测量,进行任意破舱状态下的稳性计算;也可进行受到定值阵风风力横向作用下时的稳性校核;当稳性衡准不满足时,通过自身压载舱的调整或改变其航区保证其航行安全。因此,对于大型船舶的设计有着重要的现实理论指导意义;同样有利于船长在航行指挥中做出正确的决策。
[1]李盛邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2003.
[2]向溢,李辉.船舶破舱稳性计算概述[J].广船科技,2003,(2):5-8.
[3]高家镛.船舶稳性研究的现状及展望[J].上海造船,2003,(1):15-18.
[4]蒋志勇,姚震球,王志东.船舶装载与稳性监测系统研究[J].船舶工程,2001,(5):34 -36.
[5]耿军伟,姚震球,王建华.基于Delphi的船舶液位测量系统的软件设计与实现[J].造船技术,2004,(6):34-36.
[6]蒋方帅.Borland Delphi程序设计[M].北京:清华大学出版社,2002.
[7]蒋志勇,柳存根,姚震球,王志东.脉冲反射法液位测量系统研究[J].船舶工程,1997,(3):51-53.
[8]盛振邦,杨尚荣,陈雪深.船舶静力学[M].上海:上海交通大学出版社,1991.
[9]冯振玉.船舶满足气象衡准数与抗风级别的关系[J].中国水产,2003,(8):70-72.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:04:46
舰船科学技术(2022年10期)2022-06-17 06:27:26
建材发展导向(2021年13期)2021-07-28 07:14:56
电子制作(2019年9期)2019-05-30 09:42:02
中学生数理化·中考版(2018年11期)2019-01-31 06:18:04
电子制作(2017年7期)2017-06-05 09:36:14
舰船科学技术(2015年8期)2015-02-27 15:38:55
广东造船(2015年6期)2015-02-27 10:52:45
船海工程(2013年6期)2013-03-11 18:57:37
船海工程(2013年6期)2013-03-11 18:57:35