舰载舷外有源诱饵干扰效果研究与分析
2011-06-28 03:04:54邓杏松
舰船电子对抗 2011年6期
邓杏松
(船舶重工集团公司723所,扬州225001)
0 引 言
舰载舷外有源诱饵作为一种有效的舰艇自卫反导防御手段,是传统有源、无源干扰手段[1]的重要补充。与无源弹相比,有源诱饵可产生多种干扰,从而使反舰导弹不能识别目标信号,诱骗导弹偏离真实目标。本文运用仿真的方法,以质心干扰[2]方式为例,构建仿真实验环境[3],为在实战中使用有源诱饵技术提供了有效的参考。
1 反舰导弹与诱饵仿真模型
1.1 反舰导弹与诱饵作战方式
反舰导弹飞行过程一般分为助推、下降、拉起、低空保持、跃升和俯冲等几个阶段[4-6]。反舰导弹由平台发射并指向行进中的舰艇,至一段距离后,末制导雷达开机,对目标进行搜索、捕获和跟踪。从导引头开启末制导至正确锁定目标为止是导引头的搜索阶段,导引头对预定区域同时进行角度和距离上的搜索,若波门内判断有目标回波信号时,即被末制导雷达锁定,进入跟踪阶段。
当舰载电子侦察设备探测到有高速逼近的目标时,根据作战准则,选择合适时机,发射诱饵弹,诱饵飞行至设定地点开伞,进行干扰。若诱饵弹处于雷达波束范围内,导弹将跟踪目标舰艇和诱饵的雷达回波能量中心(质心点)[7],从而偏离舰艇方向。
1.2 反舰导弹、舰艇和诱饵质心干扰仿真模型
1.2.1 反舰导弹运动模型
对于反导电子对抗仿真,其关键在于研究导弹质心点位置的变化,通过运动学方程,利用导弹和目标质心运动的有关信息描绘导弹与目标间的关系[8-10]。相关的模型如飞行控制系统、动力学模型[11]等可做相应的简化,在此基础上将过载引入导弹质心运动的动力学方程未作考虑。
由于距离、速度等因素,导弹航向与其切线方向相对变化率较小,可近似认为导弹实际指向为其切线方向。
综上所述,假定反舰导弹以恒定速率飞行,则t时刻反舰导弹质心点坐标为:

式中:vd为反舰导弹的速率;α为反舰导弹的跟踪航向角;t-1时刻表示当前时刻t的上一个仿真步长时间。
1.2.2 舰艇运动模型
为简化计算,对舰艇模型做如下处理:(1)不考虑其高度、宽度和长度,将其位置简化为质心所对应的点;(2)不考虑导弹不同来袭方向所对应的舰艇雷达反射面积(RCS)[13-15]的不同,并且假定雷达反射面积为定值。则t时刻舰艇的运动方程为:

式中:vj为反舰导弹的速率;β为舰艇的运动航向角;(xj0,yj0)为舰艇初始位置坐标。
1.2.3 诱饵模型
诱饵模型主要由诱饵的等效雷达反射面积、反应时间等特征参数描述。
雷达末制导头的峰值功率一般为30~50kW,天线增益为30dB左右。水面舰艇的RCS较大,在舰艇正横方向和艏艉方向RCS可达到数万平方米。需要最大辐射功率的情况是在末制导已锁住本舰,将诱饵发射至离舰合适位置进行质心干扰,末制导雷达截获诱饵的信号功率为

式中:Pd为诱饵发射脉冲功率;Gd为诱饵天线的增益;Gt为末制导雷达天线的增益;Rd为末制导雷达与诱饵的距离。
同时,末制导雷达截获军舰反射信号功率为:

式中:Pt为雷达发射脉冲功率;Gt为雷达天线增益;σ为目标反射面积;Rt为末制导雷达与舰艇的距离。
又由公式(3)、(4)得:

由此求得诱饵的等效RCS值:

图1所示为诱饵随距离变化的等效RCS值。

图1 诱饵等效RCS计算
诱饵反应时间主要包括舰艇侦察到威胁信号的时间、诱饵弹发射到箭弹分离的飞行时间、分离时间、开伞到稳定干扰时间。
1.2.4 诱饵质心干扰模型
诱饵应布放在导弹末制导雷达跟踪波束范围以内,诱饵质心干扰成功的约束条件如图2所示。
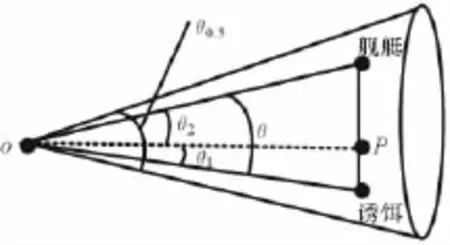
图2 质心干扰模型
假定反舰导弹处于图2中的o点处,将末制导雷达照射波束近似看成为圆锥体[16-19],其顶角大小等于雷达波束宽度θ0.5,舰艇发射诱饵的雷达反射面积为σ1,舰艇的雷达反射面积为σ2,导弹的跟踪点为P点(质心点),则诱饵与质心点的角度θ1为:

舰艇与质心点的角度θ2为:

利用公式(7)、(8),可以评判舰艇或诱饵是否处于雷达照射范围内,如图2所示。导弹在o点处,舰艇与诱饵同处雷达波束范围内,随着反舰导弹逐渐接近目标以及舰艇可能的横向运动,θ将不断增大,舰艇和诱饵中的一个将脱离雷达波束范围,导弹将转向未脱离波束照射的目标。若舰艇与诱饵之间距离较近,诱饵与舰艇在导弹逼近过程中始终处于末制导跟踪波束范围之内,基于质心干扰原理,导弹将指向诱饵与舰艇的反射回波能量中心点。
仿真时,假定反舰导弹无识别假目标能力,且反舰导弹在抵近目标1km后攻击方位不再变化。
1.3 质心干扰仿真流程
在上述模型和假设的前提下,将仿真的相关变量赋初值。根据舰艇、诱饵、导弹的动态位置和设定参数,计算导引头天线的跟踪角(瞄准真假目标的质心点),选择合适的计算步长Δt,通过质心干扰数学模型,算出经过Δt时间后的导弹跟踪角和位移,继而标定Δt时间后导弹的位置,从而逐一绘制导弹的运动轨迹,同时,绘制舰艇、诱饵的轨迹。仿真流程如图3所示。
式中:dIJ为目标回波的间隔距离;i,j=1,2,…,N;I=1,2,…,N;J=1,2,…,N。在目标回波中,若dIJ≤α,|H(Ai)-H(Aj)|
2 舷外有源诱饵干扰效果分析
2.1 干扰效果分析

图3 诱饵质心干扰仿真流程
依据上述数学模型编制计算机软件,将仿真实验的导弹飞行速度、末制导雷达波束角、开机距离、目标舰艇机动速度和角度以及诱饵反应时间等变量分别赋值。通过比较,直观地说明诱饵对抗反舰导弹的干扰特性,表1列出了某次仿真中的各种初始状态和参数值。

表1 典型参数值表
由于诱饵角度欺骗的干扰距离比较近,末制导开机距离通常为8~12km,所以仿真时弹目起始距离设为20km,能基本反映攻防双方的对抗情况。
图4为在未施加诱饵干扰情况下导弹击中舰艇的攻击弹道。
以下通过改变诱饵的布放距离、有效发射功率2种主要参数来分析诱饵对抗反舰导弹干扰的成功率。
如图5~图7所示,导弹航迹有3个明显的变轨过程,分别为:
(1)在点A处末制导开机;
(2)在点B处诱饵开始工作;
(3)诱饵或舰艇脱离波束的距离位置点C。

图4 无干扰情况下导弹击中目标
2.1.1 不同的布放距离对诱饵掩护舰艇干扰成功率的影响
如图5所示,导弹末制导雷达在离目标10km处跟踪目标,假定诱饵反应时间为5s,诱饵等效发射功率为8kW,诱饵与舰艇横向距离约为100m,舰艇作12m/s横向机动。从对抗试验结果分析,在等效发射功率为8kW时,诱饵掩护1×105m2以下水面舰艇的干扰成功率较高。
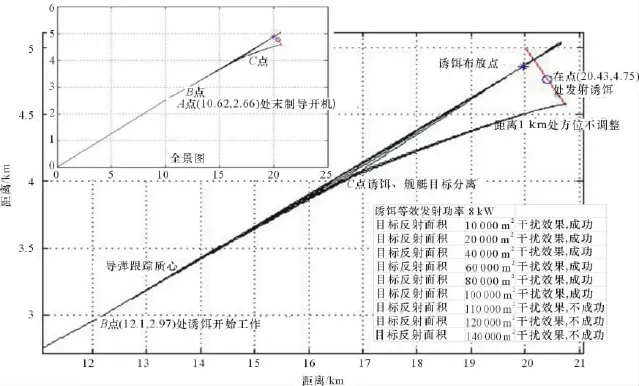
图5 发射功率为8kW时,末制导开机距离为10km,诱饵反应时间为5s的干扰仿真结果
如图6所示,导弹末制导雷达在离目标10km处跟踪目标,诱饵反应时间为5s,在目标舰艇静止条件下的干扰仿真结果。在相同等效发射功率条件下,诱饵能掩护2.5×104m2的目标。

图6 诱饵等效发射功率为8kW时舰艇静态干扰仿真结果
图7为末制导开机距离为12km,诱饵反应时间为10s时的干扰仿真结果图。从对抗试验结果分析,在等效发射功率为8kW时,诱饵能掩护7×104m2以下水面舰艇。
图5、图6、图7分别通过3个对抗场景计算仿真了诱饵的干扰过程。从导弹航迹以及对抗三者的不同位置态势分析,此3类情况,可基本归结为诱饵不同横向布放距离对干扰效果的影响,即在导弹距离较远时,若能将诱饵及时布放在导引头的波束内,较远的横向布放距离有利于提高诱饵干扰能力。
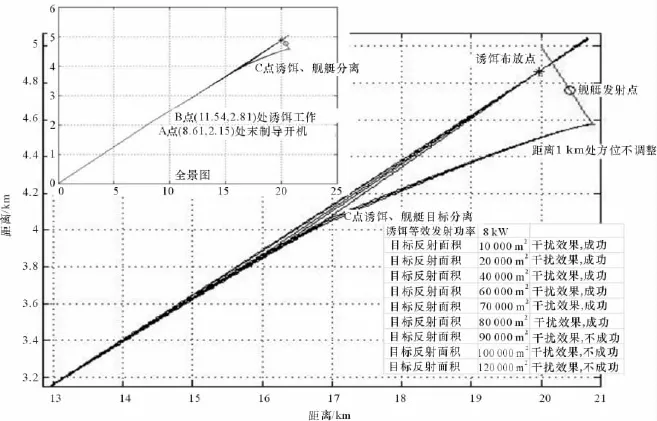
图7 发射功率为8kW时,末制导开机距离为12km,诱饵反应时间为10s的干扰仿真结果

图8 诱饵发射功率2kW时,末制导开机距离为10km,诱饵反应时间为5s的干扰仿真结果
2.1.2 不同的诱饵发射功率对干扰成功率的影响
如图8所示,末制导开机距离为10km,诱饵反应时间为5s,诱饵的等效发射功率为2kW时,从对抗结果分析,只能掩护1×104m2以下水面舰艇。比较图5与图8可知:诱饵具有较高的等效发射功率,显然有利于干扰效果。
2.2 影响诱饵干扰效果的主要因素
诱饵横向布放距离较远时,由于有源干扰的特点,诱饵在质心对抗过程中能获得较大的优势,从而干扰效果较好;诱饵横向布放距离较近时,随着弹目距离的减小,诱饵的等效散射截面下降较快,在质心对抗过程中并不占优势,从而掩护目标面积也相对减小较多。但是,以上仿真是基于导弹无目标识别能力的前提下进行的,若诱饵布放距离过远,过早形成导弹跟踪诱饵单一目标的情况,导弹可能重新搜捕真目标。因此,诱饵的横向布放距离并不是越远越好。
干扰功率对诱饵的干扰效果影响是直接的,但是考虑到性价比和一系列技术问题,也不能无限提高发射功率。因此,诱饵干扰战术、技术参数的设计将是一个需要不断研究的课题。
3 结 论
有源诱饵是对抗反舰导弹新的技术手段,其战术使用是一个新的领域,代表了舰艇电子对抗的一个重要发展方向。本文所建立的动态仿真流程较为真实地反映了反舰导弹攻击目标,以及目标实施有源诱饵干扰的过程,为今后更深层次的战术效果系统仿真和应用打下了良好的基础。
[1]Lai Qing-fu,Dai Huan-yao,Zhao Jing,Feng De-jun,Wang Xue-song.A novel approach of countering centroid jamming by using INS information in terminal guidance[A].IEEE Conferences ICSP 2010[C].Beijing,China,2010:2121-2124.
[2]邱杰,黄盛霖,何宝民.毫米波反舰导弹末制导雷达抗质心式箔条干扰问题研究[J].系统工程与电子技术,1997(9):14-18.
[3]Adamy David L.电子战建模与仿真导论[M].吴汉平译.北京:电子工业出版社,2004.
[4]Ra W S,Whang I H,Ahn J Y.Robust horizontal lineof-sight rate estimator for sea skimming anti-ship missile with two-axis gimballed seeker[J].IEE Proceed-ings.Radar,Sonar&Navigation,2005,152(1):9-15.
[5]Kim,Yoon-Hwan,Ryoo,et al.Guidance synthesis for evasive maneuver of anti-ship missiles against close-In weapon systems[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(3):1376-1388.
[6]Park Hae-rhee,Whang Ick-Ho.An effective target selection algorithm for ASM [A].IEEE.SICE-ICASE[C],2006:2930-2934.
[7]李照顺,孙振华,徐锦州,等.舰艇箔条质心干扰模型与仿 真 研 究 [J].系 统 仿 真 学 报,2009,21(4):4203-4206.
[8]陈长海.反舰雷达导引头建模与仿真研究[D].西安:西安电子科技大学,2009.
[9]卢发兴,吴玲,董银文.无航路规划能力的反舰导弹盲目射击[J].系统工程与电子技 术,2009,31(11):2658-2662.
[10]王思福,刘永才,关世义,等.软杀伤对抗条件下的末制导捕捉概率仿真研究[J].系统工程与电子技术,2007,29(2):250-253.
[11]龚铮.弹舰电子对抗的视景仿真技术研究与应用[D].西安:西北工业大学,2007.
[12]徐建志.反舰导弹捕捉能力建模与仿真[J].系统仿真学报,2008,20(1):874-877.
[13]关成启,杨涤.反舰导弹捕捉目标概率算法模型[J].系统工程与电子技术,2001,23(7):91-94.
[14]Zhao Rao B,Xiao Y L,Wang S P.Discrimination of exo-atmospheric active decoys using acceleration information[J].Radar,Sonar&Navigation,IET,2010,4(4):626-638.
[15]Law Averill M,Kelton W David.Simulation modeling and Analysis(Third Edtion)[M].USA:The McGraw-Hill Companies,Inc,2000.
[16]徐喜安.单脉冲雷达系统的建模与仿真研究[D].成都:电子科技大学,2006.
[17]Zhao Yi-nan,Jin Ming,Wang Jun,et al.A practical method against passive centroid jamming in monopulse radar[A].IEEE Conferences CIE'06[C].Shanghai,2006:1-3.
[18]Li Yi-min,Gan De-yun,Su Dong-lin.Analysis of amplitude for the anti-radiation weapon antagonizing active decoy[A].Antennas,Propagation and EM Theory,2008.IEEE Conferences ISAPE [C],2008:1198-1202.
[19]Benavoli A,Chisci L,Farina A.Tracking of a ballistic missile with a-prior information[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(3):1000-1006.
猜你喜欢
科普童话·神秘大侦探(2022年4期)2022-05-26 19:57:56
作文小学高年级(2022年2期)2022-03-03 08:54:32
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:06
无线互联科技(2017年24期)2018-01-22 10:39:24
中国管理信息化(2017年18期)2018-01-04 18:41:52
兵器知识(2017年10期)2017-10-19 19:34:33
物联网技术(2017年2期)2017-03-15 17:18:11
现代防御技术(2016年1期)2016-06-01 12:13:27
海军航空大学学报(2015年1期)2015-11-11 17:18:30
科学时代·上半月(2013年2期)2013-04-15 01:50:14