基于UML的对空情报雷达组网仿真系统分析
2011-08-10 06:16:00王学青赵立刚魏冬峰
舰船电子对抗 2011年6期
王学青,赵立刚,魏冬峰
(1.防空兵指挥学院,郑州450052;2.解放军66111部队,北京100042)
0 引 言
对空情报雷达组网是发现隐身飞机、巡航导弹,对抗电子干扰以及提高发现效能的有效手段,是对空情报雷达运用的必然趋势[1]。对空情报雷达网是集多种侦察雷达系统、数据处理系统、指挥系统的复杂系统,加之战场形式实时多变、不确定性大,使得通过计算机建模和仿真对对空情报雷达组网效能和运用方法进行分析成为有效手段。目前,针对雷达组网效能评估的模型不少,但大多考虑因素较少,条件设置没有针对性,真正考虑在信息化条件下如何有效地组织各类对空情报雷达装备遂行作战任务、密切协同已到达作战需求的仿真系统很少。因此。对对空情报雷达组网的仿真必须站在一体化联合作战的高度上,通过对各雷达装备进行有效的组织集成,才能达到整体作战的仿真效果。
统一建模语言(UML)是第3代用来为面向对象开发系统的产品进行说明、可视化和编辑文档的方法。这种语言得到了“UML伙伴联盟”的应用与反馈,并得到工业界广泛的支持,由对象管理组织(OMG)采纳作为业界标准。UML取代目前软件业众多的分析设计方法,成为一种标准,是一种在大型复杂系统建模领域中得到认可的优秀软件工程方法。UML提供了充分的基于面向对象的概念元素和表达元素,可有效描述系统开发各阶段的模型[2]。
1 对空情报雷达组网仿真分析
随着现代电子信息技术的发展和武器装备信息化水平的提高,未来基于组网的一体化侦察体系是解决“发现”问题的必然途径。对空情报雷达网是以大型骨干雷达为基础,兼以低空补盲为辅助的有机组合,力求形成全方位、有重点、多频段、多体制、连续不间断的空中侦察监视能力。各雷达协同工作、横向贯通、信息汇总、多源融合、情报共享。
对空情报雷达组网的仿真是联合防空作战仿真系统的一部分,它主要是通过实时的过程仿真,提供雷达组网部署训练环境,为防空作战仿真系统提供实时的空中情报,辅助指挥训练人员完成作战任务,检验雷达组网的探测效果。对空情报雷达组网仿真系统组成如图1所示。
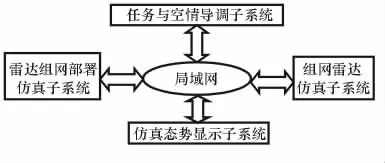
图1 对空情报雷达组网仿真系统组成
2 对空情报雷达组网仿真系统建模
仿真系统的功能需求可由用例视图来描述,它强调从用户角度看到的需求功能,用例模型是把满足用户的基本功能聚合起来表示的有效工具。对于正在构造的新系统,用例描述系统应该做什么;对于构造完毕的系统,用例则反映系统能够完成什么样的功能。用例模型的基本组成为角色、用例和系统。
2.1 确定角色
角色是与系统交互的人或事,对于本仿真系统而言为系统的使用者、管理者和外部交互目标[3]。从实际作战训练角度出发,考察本系统主要的交互人员,具体如下:
(1)组网训练人员,他根据任务背景实施雷达组网的部署,空情想定运行中对雷达网进行指挥控制。
(2)任务想定导调人员,他规划雷达组网仿真的任务想定背景和空情想定,控制全系统仿真的运行。
(3)训练监控人员,他监视雷达组网部署的实施情况和雷达网探测仿真的运行结果,与想定比对给出组网的探测效果结论。
由于以上三类人员主要与系统发生交互,所以可以创建训练席、导调席、监控席等角色。
2.2 创建用例
用例代表一个完整的功能,是动作步骤的集合,即系统提供给角色的操作集合[3]。作为用例它具有3个特征:用例由角色的初始化、用例为角色提供值、用例具有完整性。从此角度分析,对空情报雷达组网的仿真流程大致可分为以下几个用例:
(1)任务想定导调人员规划作战任务,选定作战地域,部署指挥机构和火力单元等作战要素,确定侦察监视范围,指定主要探测方位、高度和来袭机型等,指定部署使用的雷达类型和数量。编辑空情想定,设定空袭兵器飞行器路线,配置干扰、反辐射导弹等空情要素。
(2)组网训练人员,接收组网部署的任务背景,在指定作战地域内根据部署要求选择各雷达所处阵地位置,检查阵地条件,察看雷达网探测范围。部署完毕后,启动组网雷达的运行。
(3)组网雷达接收想定空情,仿真对目标的探测过程,输出探测结果。
(4)组网训练人员根据空情与雷达的运行情况,控制组网雷达状态。
(5)训练监控人员,接收组网部署的任务背景,接收组网部署结果,对部署情况进行静态分析。
(6)训练监控人员,接收想定空情,接收雷达网探测结果,对雷达网探测情况进行动态监视和分析。
(7)任务态势显示。
(8)雷达网探测结果显示。
2.3 创建关系图
根据上述分析得到的角色和用例可知对空情报雷达组网仿真系统具有任务想定编辑、空情想定编辑、空情实时生成、雷达网部署、雷达阵地数据分析、雷达探测范围绘制、雷达系统运行仿真、组网信息显示等功能。同时,对于不同地形条件、任务条件、空情条件,不同的雷达装备都有不同要求和表现,仿真时要充分考虑,努力使设置的想定与实际情况接近,雷达的仿真要符合或贴近雷达的性能,以使组网仿真能够体现出符合实际的对抗效果。
在仿真过程中不仅要设置复杂的目标环境,还要设置各种干扰、反辐射导弹攻击等环境,采用双方对抗的方式实现雷达组网探测与对抗仿真。对空情报雷达组网仿真系统的主用例模型如图2所示。
仿真过程中导调席可实时改变各种干扰设置,并仿真机载侦收雷达对雷达的发现过程,给出发现结果,还可控制反辐射导弹对已发现的雷达实施攻击。而训练席,则根据当前的发现情况和各雷达被干扰的情况,采取相应的措施,设置雷达运行状态,改善雷达网对目标的探测效果,避免雷达被反辐射导弹摧毁。通过这个过程不仅充分体现了雷达组网发现目标的过程,也体现了雷达组网探测的对抗性。
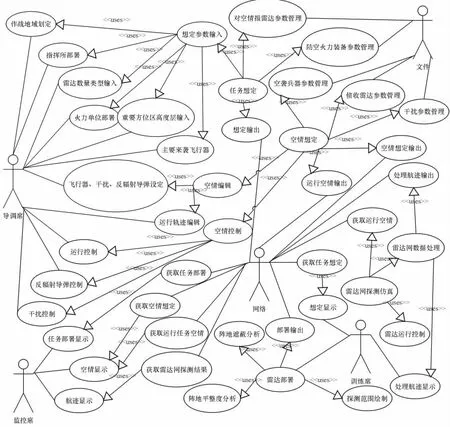
图2 对空情报雷达组网仿真系统用例图
3 对空情报雷达组网仿真系统静态建模
(1)任务模型
任务模型用于描述对空情报雷达网部署的任务背景,及应该探测的空域范围和需要达到的探测效果,包括指挥机构、火力、部署地域、探测空域、敌方来袭方向等方面。
(2)空情想定模型
空情想定模型用于描述空袭兵器的运行轨迹的特征、飞行器性能特征、飞行器携带干扰的设置、飞行器携带反辐射导弹的设置,并根据以上特征和设置生成对应的空情运行仿真数据。
(3)雷达网部署模型
雷达网部署模型用于描述雷达部署的位置特征,分析阵地条件,分析组网探测范围。
(4)雷达模型
雷达模型用于描述系统中各仿真雷达属性及对虚拟空情探测能力。主要是雷达的功能模型、效能模型、重要的信号处理模型及控制模型,通过以上模型体现雷达的性能,和对不同飞行器、干扰、杂波、反辐射导弹等空情要素变化的雷达探测效果。
(5)电子战模型
电子战模型用于描述干扰机、雷达侦收设备、反辐射导弹的性能及效能模型。主要有干扰机及干扰的模型、侦收雷达的侦收模型、反辐射导弹的性能模型,通过以上模型体现干扰和侦收雷达在空域、频域、信号形式等方面的覆盖范围,及反辐射导弹在空域、频域的跟踪能力和对雷达的摧毁能力。
(6)杂波模型
杂波模型用于描述雷达所处地理、气象、民用电磁等环境产生的杂波,主要包括地物杂波模型、海杂波模型、通信干扰模型、电视干扰模型等。
(7)评估模型
评估模型用于对雷达网的部署和探测效果进行评估。对雷达网的部署根据任务要求进行静态评估,对雷达网的探测效果根据虚拟对抗过程中输出的探测航迹和对雷达控制的正确性进行动态评估。
静态模型是从系统的内部结构和静态角度来描述系统的视图,在整个需求分析中它定义了相关对象和类以及它们内部和彼此之间的关系,图3给出了对空情报雷达组网仿真系统中的主要类图。
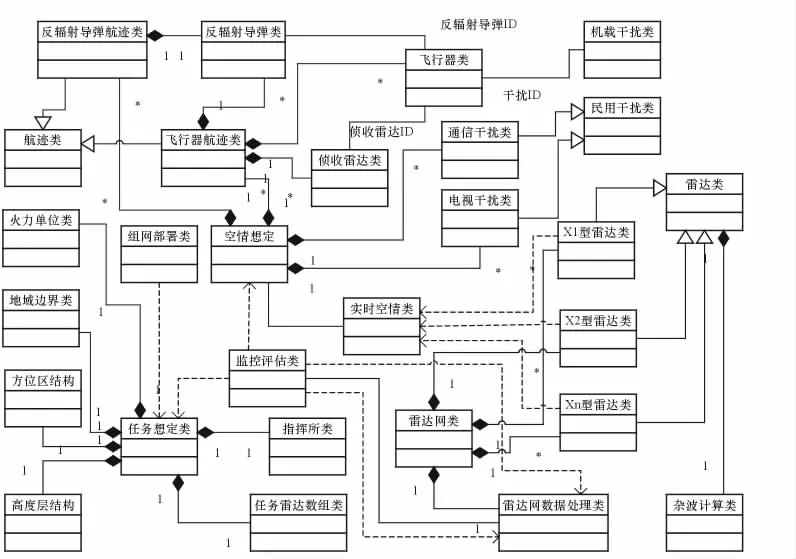
图3 对空情报雷达组网仿真系统主要类图
4 对空情报雷达组网仿真系统动态建模
所有系统均可表示为2个方面:静态结构和动态行为。UML提供图来描述系统的结构和行为。而状态、顺序、协作和活动图则适合于描述系统的动态行为,即描述系统中的对象在执行期间不同的时间点是如何动态交互的[4]。
其中,状态图与活动图、顺序图与协作图在语义上是等价的。状态图描述对象在生命周期内处于哪些状态,每种状态的行为以及什么样的时间引起对象状态发生改变。顺序图描述对象如何交互和通信,侧重消息的时间顺序。协作图也是描述对象交互的,但侧重于空间协作,给出对象间的关系。活动图注重于从活动到活动的控制流,是工作描述。
本文以UML的顺序图为例简要描述了整个对空情报雷达组网仿真的基本流程,如图4所示。
在图4中,顶部的矩形框描述了参与仿真的对象,即任务想定、空情想定、雷达部署、雷达网探测仿真、监控。每个对象底部中心的垂直虚线代表了该对象的生命周期,表示对象在此周期内进行各项活动的时间。虚线间的箭头表明各对象间的通信,通过信息的交互和协作来完成实体间的仿真操作。由顺序图的各类元素可以清晰地描述出对空情报雷达组网仿真系统从任务想定生成和空情编辑直到雷达网的部署和雷达网的探测仿真的全过程。
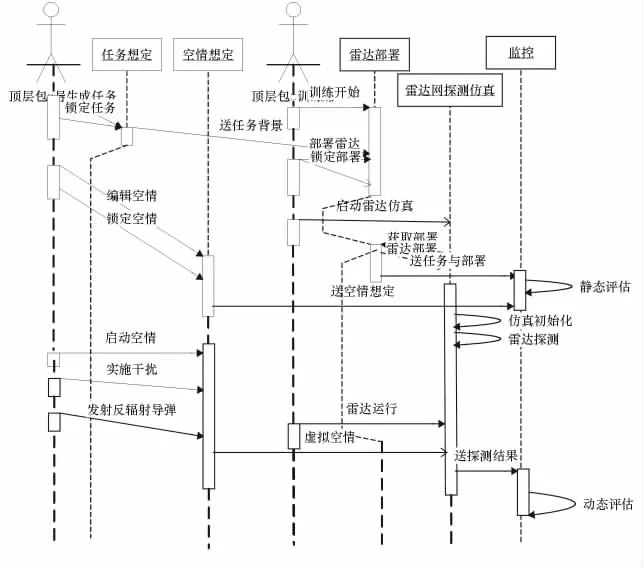
图4 对空情报雷达组网仿真系统顺序图
5 结束语
需求是决定整个系统设计合理性的关键。与结构化的需求分析相比,运用UML来对对空情报雷达组网仿真系统进行建模,更能体现系统行为,可以有效地捕获系统需求,清晰直观地描述系统功能,有利于军事用户和系统设计人员之间的沟通,达成共识。限于篇幅,本文只给出了对空情报雷达组网仿真系统需求分析的简要描述,以上这些描述还需进一步修改、细化、完善,使之更加符合对空情报雷达组网的实际情况。
[1]时银水.联合火力打击战役防空兵侦察预警战场环境与战斗行动研究[J].防空兵指挥学院学报,2007(2):36-38.
[2]James Rumbaugh,Ivar Jacobson,Gradv Booch.The U-nified Modeling Language Reference Manual[M].Addison Wesley Longman,Inc.1999.
[3]蔡敏,徐慧慧,黄炳强.UML基础与Rose建模案例[M].北京:人民邮电出版社,2006.
[4]王少锋.面向对象技术[M].北京:清华大学出版社,2004.
猜你喜欢
现代装饰(2022年5期)2022-10-13 08:49:18
现代装饰(2022年4期)2022-08-31 01:42:30
现代装饰(2022年3期)2022-07-05 05:59:04
科学与信息化(2021年12期)2021-12-27 01:39:02
铁道通信信号(2019年11期)2019-05-21 03:05:46
出土文献与古文字研究(2018年0期)2018-11-04 00:42:00
成都信息工程大学学报(2018年6期)2018-03-21 05:45:52
雷达学报(2017年1期)2017-05-17 04:48:57
火控雷达技术(2016年2期)2016-02-06 02:29:07
小天使·一年级语数英综合(2015年10期)2015-10-14 06:37:12