
点光源追踪系统设计*
2011-06-25 08:06王再明韦稳稳
湖北理工学院学报 2011年4期
李 超 王再明 甘 铭 韦稳稳 刘 刚
(黄石理工学院电气与电子信息工程学院,湖北黄石435003)
如今,太阳能资源已越来越受到人们的关注,如何提高太阳能资源的利用效率已经成为当今世界能源行业重要的话题。本系统旨在设计一个模拟强点光源追踪装置,以提高光源的利用率。装置由模拟强光源和光源追踪2部分构成。模拟强光源装置采用TI公司的LM317组成可调恒流源装置控制1 W高亮度LED光源,并且使用电阻分流和MSP430内部ADC采样数显[1]。追踪装置采用高性能、低功耗AVR单片机Atmega16作为主控芯片,将采集到的信号进行综合判别和处理,然后控制舵机实现对光源的跟踪。为保证有效及时的跟踪光源,本设计采用了带聚光罩的多光敏感光控制装置,并采用凸透镜装置对接收光源聚光采样,采用逐次比较定位法实现对点光源的实时跟踪,并可以通过键盘对装置进行校准。同时点光源也可以做圆周、直线、曲线等运动,即改变点光源的位置,探测源能够很快而准确的追踪到点光源。
此项目主要是点光源追踪研究,其主要的目的是研究如何提高太阳能的利用率。而且此装置只需要换上其他的传感器,则可以实现物体追踪的功能,如人体热释电感应追踪。
1 系统结构
本系统由光源跟踪装置和点光源控制装置组成,其中光源跟踪装置包含光源检测模块、按键模块、舵机控制模块、LCD数显模块;点光源控制装置包含恒流源调节模块、LED发光源、电源检测模块和LCD显示模块。光源跟踪装置如图1所示,点光源控制装置如图2所示。

图1 光源跟踪装置
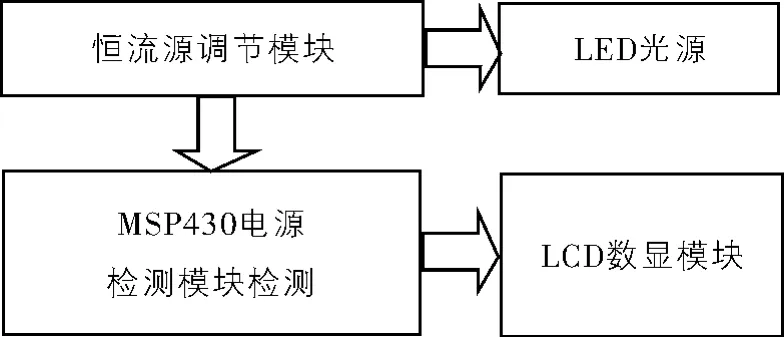
图2 点光源控制装置
本系统以ATmega16单片机为控制核心。在光源跟踪装置中,用光敏电阻作为光源检测传感器,以 ATmega16单片机内部8路10位ADC进行采样和转换[2],双舵机构成激光笔控制执行机构,由单片机对A/D转换的数据进行处理,采用 PID算法输出 PWM波控制舵机带动激光笔指向光源[3]。在点光源控制装置中,采用 TI公司的 LM317设计横流输出装置,通过调节电位器,使得输出电流在一定范围内可连续可调,MSP430单片机内部ADC进行采样并通过计算获得电流值,并在1602 LCD屏上显示。
2 硬件电路设计
2.1 光源检测电路
图3是光源跟踪装置中光线检测的电路图,由6个光敏电阻组成。4个水平,垂直上下各1个,实物图如图4所示。将光敏电阻放在一个不透明的圆筒中,圆筒前部安装凸透镜,以便聚光。当圆筒与光源正对时,水平方向上中间2个光敏电阻各得到一半光斑,记录此时AD的输出数据max。当不正对时,AD的输出数据大于max,控制其中一部舵机转动,直至AD输出的数据达到max,此时水平方向上中间2个光敏电阻各得到一半的光斑,即激光笔与光源正对,完成水平方向的光源跟踪。垂直方向光源跟踪同水平方向,为了ADC采样达到更高的精准度,减小误差,采用LM317设置了标准的5V基准源,给光源检测电路提供电源和ADC采样的基准电压。
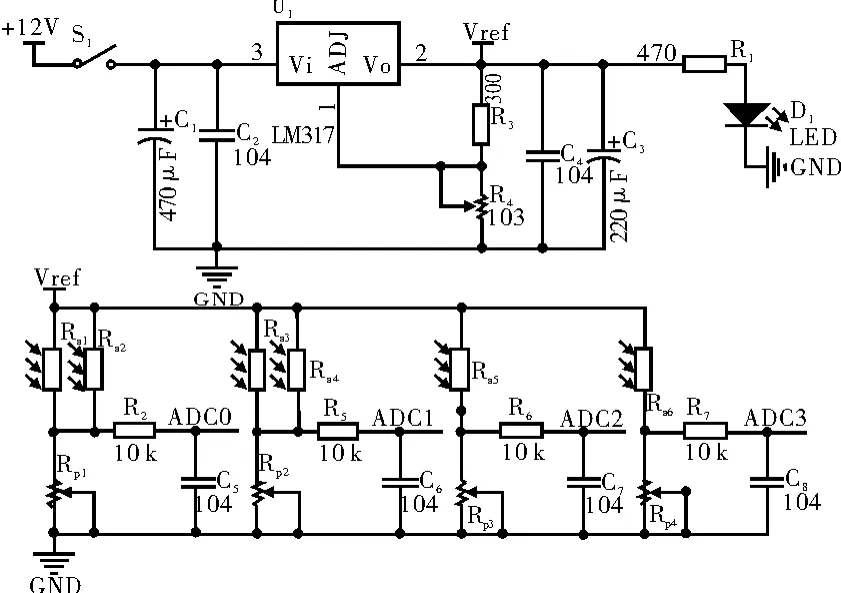
图3 光线检测电路图

图4 传感装置示意图
2.2 可调恒流源电路
点光源控制电路如图5所示,选用 TI公司的LM317,通过调节电位器 RP2,使得输出电流在137~375 mA间可调节;在LM317输出端把4个1 W 5.1 Ω电阻串联再并联组成的电阻网络串入LED光源,测量此电阻网络的端电压,并送入MSP430内部ADC进行采样,通过计算获得电流值,并在1602 LCD屏上显示。通过4个电阻组成网络进行电压测量可以减小每个电阻上的功耗,从而减小因温升引起电阻值的变化,提高电流测量精度。其电路输出电流可由公式(1)计算。
因输出电流要求控制在150~350 mA之间,即根据 LM317计算公式(1),可知限流电阻需在 3.57~8.33 Ω 之间。从电阻和变阻器功耗出发,我们设计了图5中的R电阻网络,其中 RP2是100 Ω精密多圈电位器,Vref为 1.25 V,R2和 R4分别为10 Ω 和 5.1 Ω 2 W 水泥电阻,通过 R4与RP2串联然后并联 R2,其输出电流可由公式(1)计算得到。
因R电阻网络电压保持1.25 V不变,可以计算得到 R2上的电流为 1.25/10=0.125 A=125 mA,其功率为0.125×0.125×10=156 mW,当 RP2为 0 Ω 时,R4上电流为1.25/5.1=245 mA,其功率为1.25 ×1.25/5.1=306 mW,即R电阻网络总最大功耗为156+306=462 mW;当RP2为 100 Ω 时,R4上电流为1.25/105.1=12 mA,其功率为0.012×0.012×5.1=0.7 mW,此时RP2上的功耗为0.012×0.012×100=14 mW。RP2上的功率可由公式(2)表示。
由公式(2)对RP2进行求导可知,当RP2=5.1 Ω时,RP 上最大功耗为15 mW,由此可知,在精密多圈电位器上的功耗小于器件要求的最大极限值,从而确保电位器上没有过高温升,从而保证了电流的测量精度和电路的稳定性与可靠性。
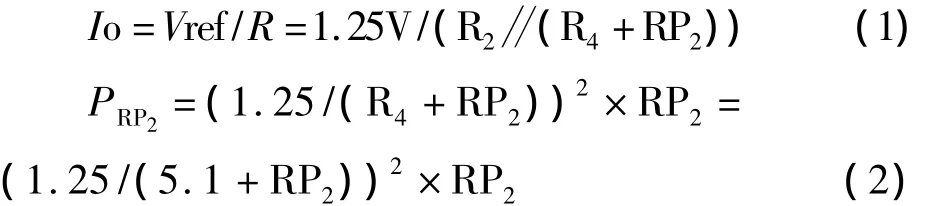
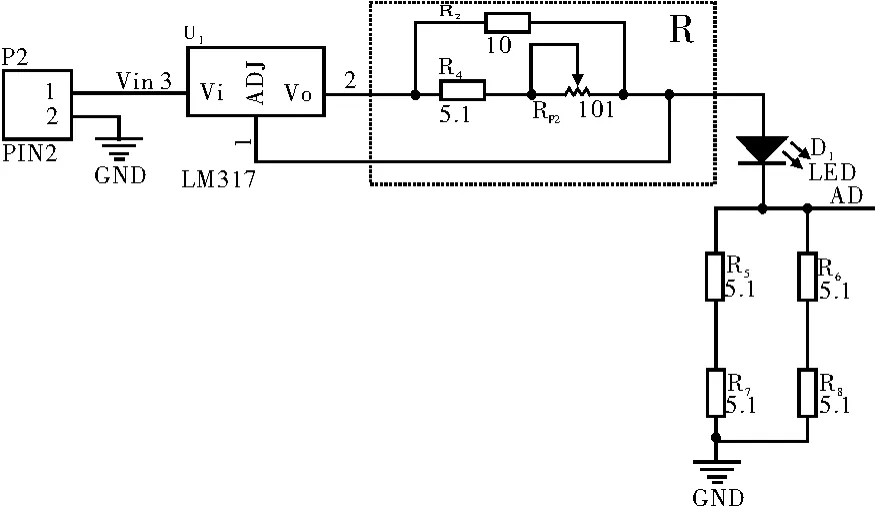
图5 点光源控制电路
3 软件设计
本系统控制部分主要采取PID模糊控制算法控制2舵机的运转来保证对光的精确度,主程序流程图如图6所示。
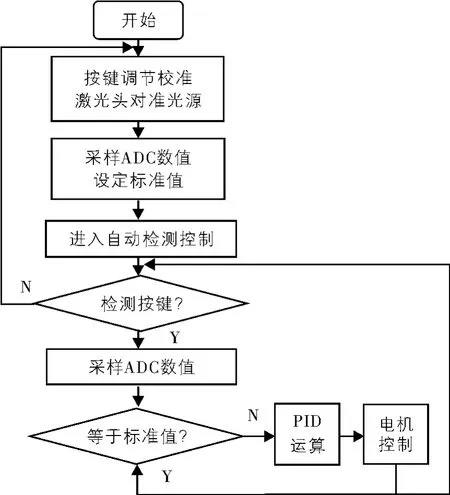
图6 主程序框图
PID算法控制是目前应用最为广泛的一种自动控制器。它具有原理简单、易于实现、适用面广、控制参数相互独立、参数的选定比较简单等优点。它按偏差的比例(P)、积分(I)和微分(D)进行控制,目前包含3种比较简单的PID控制算法,分别是:增量式算法、位置式算法、微分先行。在本系统中,我们主要采用了位置式算法,先将I、D设为0,调好P,达到基本的响应速度和误差,再加上 I,使误差为0,这时再加入D,3个参数要反复调试,最终达到较好的结果。
在系统运行前,需要通过按键手动校准,通过按键调节,首先将激光对准光源,采样到当时的ADC值,进行记录,通过调节可变电位器,使得ADC采样值为最大max,并记录为标准值。
光源检测电路的ADC0-ADC4连接AT-mega的内部ADC端口进行采样分析,把采样到的信号与标准值进行实时分析计算,控制舵机的旋转来控制检测瞄准系统的升降,使得激光始终对准光源,并在液晶上显示对应数据[4]。
经过实际制作测量,本系统光源对准的精准度在5 mm以内,满足本设计需求。
恒流源部分,仅仅采用单片机内部ADC采样数显,程序设计比较简单,经实际测量分析,误差在1 mA以内。
4 结束语
本文介绍了一种关于点光源追踪系统的系统设计和控制算法,并提出设计过程中应注意的问题。本系统的创新点在于通过光敏电阻的器件性质,将光照强度和电压信号量相联系,通过 ADC转换成数字量,给 ATmega16单片机进行分析,采用PID算法控制。经测试表明本系统具有反应时间短、结构简单、精度高、灵敏度高等优点。
[1]胡大可.MSP430系列FLASH型超低功耗16位单片机[M].北京:北京航空航天大学出版社,2001:189-197
[2]马潮.AVR单片机嵌入式系统原理与应用实践[M].北京:北京航空航天大学出版社,2007:302-321
[3]霍罡.可编程程序控制器模拟量及PID算法应用案例[M].北京:高等教育出版社,2008:97-111
[4]姚俊武.自重构机器人协作功能的规划与实现[J].黄石理工学院学报,2010,5(1):1-4
猜你喜欢
中国图象图形学报(2023年2期)2023-02-21
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
福建建筑(2019年11期)2019-12-23
World Journal of Hepatology(2019年5期)2019-06-20
山西青年(2017年8期)2017-01-31
中国信息技术教育(2016年23期)2017-01-03
物理实验(2015年5期)2015-03-14
物理实验(2014年8期)2014-09-12
中国医疗设备(2013年7期)2013-11-19
吉林大学学报(工学版)(2013年5期)2013-08-16
