
单反相机立体摄取镜头的研制
2011-06-25 03:30贾正松张德忠
电视技术 2011年22期
贾正松,张德忠
(四川信息职业技术学院,四川 广元 628017)
0 引言
目前,双目体视的立体图像获取是由不同位置的2台或者1台相机经过移动或旋转拍摄同一幅场景,获取立体图像对。它是直接模拟人类双眼来记录三维景物的一种方式,具有可靠简便、场景真实、立体感强等特点,在许多领域均极具应用价值[1]。但由于镜头光路不对称及两视差图像的摄取位置误差,在重构立体图像时如果视差分离不完全会产生较严重的重影,长时间观看会出现视觉疲劳、头晕等现象,不分离视差时图像无法裸眼观看,不利于立体照相技术的推广。
针对上述立体照相技术的不足,笔者提出了一种用于单反数码相机的立体镜头。在相机快门信号的控制下,对镜头光路对称分割,利用镜头光瞳局部成像实现双目视差立体图像对的摄取[2]。
1 立体镜头的实现方案
立体镜头的实现方案如图1所示,它主要由立体光圈、聚焦物镜组件、控制电路三大部份构成。立体光圈的左、右子光圈将镜头光路对称分割,镜头工作时,物镜组件通过子光圈将场景聚焦成像于CCD上,利用单反相机连拍时输出的快门信号,通过控制电路控制立体光圈工作于不同方式,分时复用相机摄取左、右眼视差图像及红青互补色立体图像。
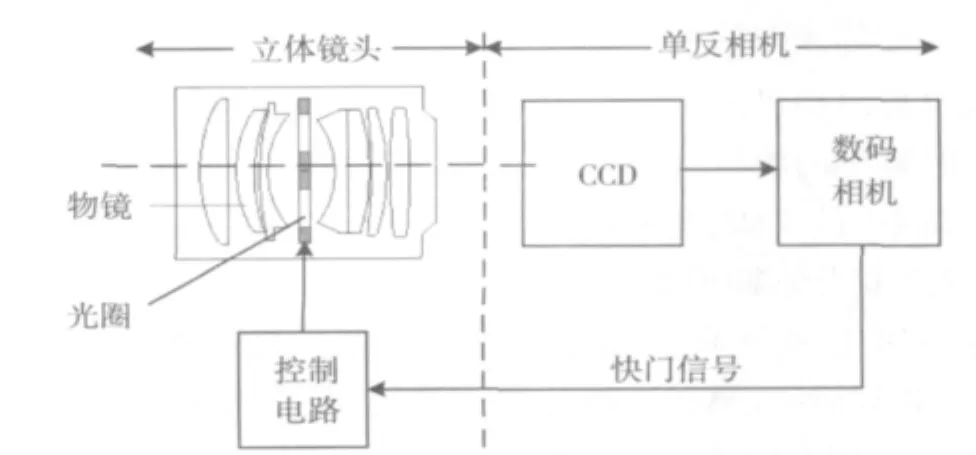
图1 立体镜头实现方案图
2 立体光圈设计
立体光圈结构如图2所示,它主要由支架,左、右子光圈,红、青滤色片及旋转电磁铁构成[3]。为确保左、右眼视差图像景深一致,左、右子光圈应具有相同的直径d。当左、右子光圈外侧间距D确定时,左、右眼视差图像的景深(即立体图像景深)随d/D的增大而减小,合成图像的无重影景深随d/D的增大而增大,当d=D/3时,可得到立体光圈工作时,旋转电磁铁在控制信号的驱动下,最大立体景深的无重影画面[4]。
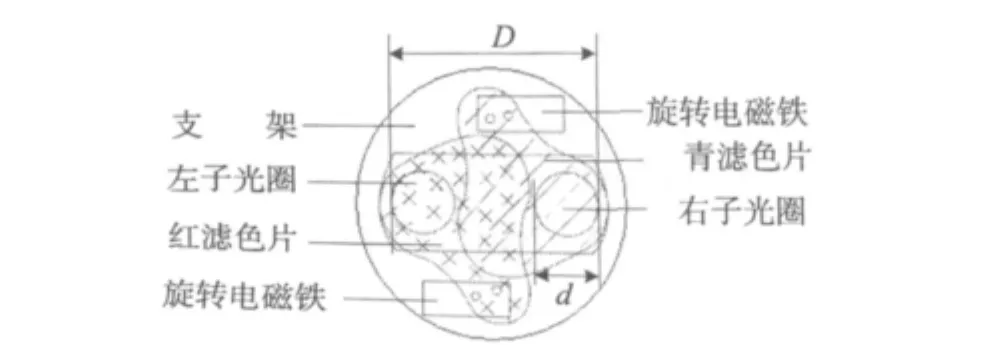
图2 立体光圈结构示意图
立体光圈工作时,旋转电磁铁在控制信号的驱动下,带动与之相连接的红、青滤色片转动。由于红、青滤色片具有完全互补的滤光特性,当两滤色片分别覆盖两个子光圈可摄取红青互补色立体图像;当两滤色片同时覆盖左、右光圈,可获得右、左立体视差图像。
3 控制电路设计
3.1 主控制器
控制电路中的微处器采用ATtiny13A单片机,它是一款高性能、低功耗的8位AVR微处理器,片内有64 byte的SRAM,一个独立的8位定时器/计数器及两条PWM通道,独立片内振荡器的可编程看门狗定时器,具有低功耗空闲模式、噪声抑制模式、省电模式和增强型上电复位功能。该单片机可满足相机的节能要求。
3.2 硬件电路设计
立体光圈的控制电路如图3所示,图中电源电压VCC取自数码相机内5 V的VBAT电压。当图像摄取设备工作时输出的快门信号,经电阻R1和R2分压后送入单片机U1的3脚,在单片机内部程序的控制下从U1的5,6,7,2脚分别输出如图4所示的 PB0,PB1,PB2和PB3脉冲序列,这些脉冲序列经U2内部电路放大后分别从3,8,13,18脚输出,驱动立体光圈中与左、右子光圈相连接的旋转电磁铁L3和L4转动。
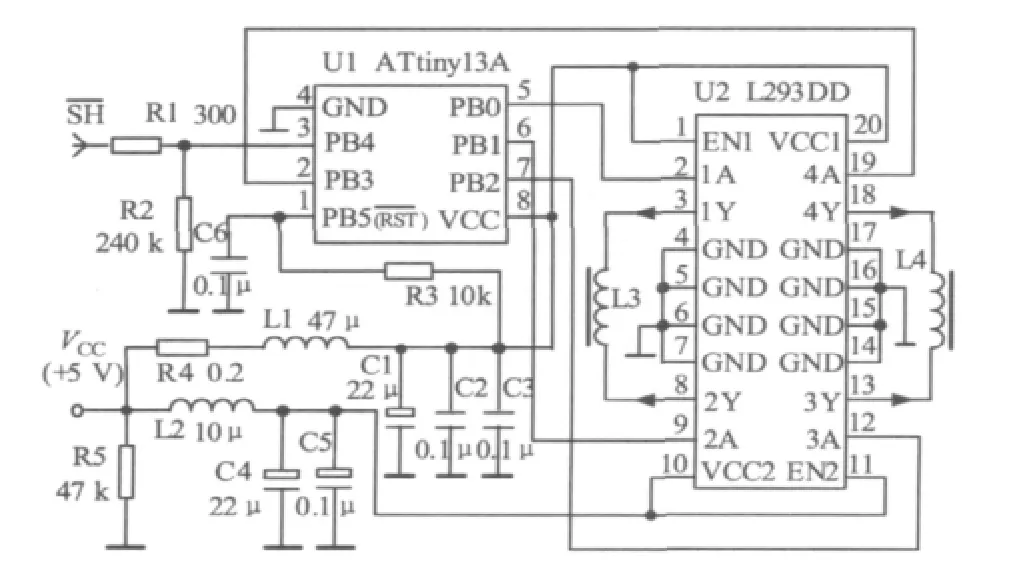
图3 立体光圈驱动电路图
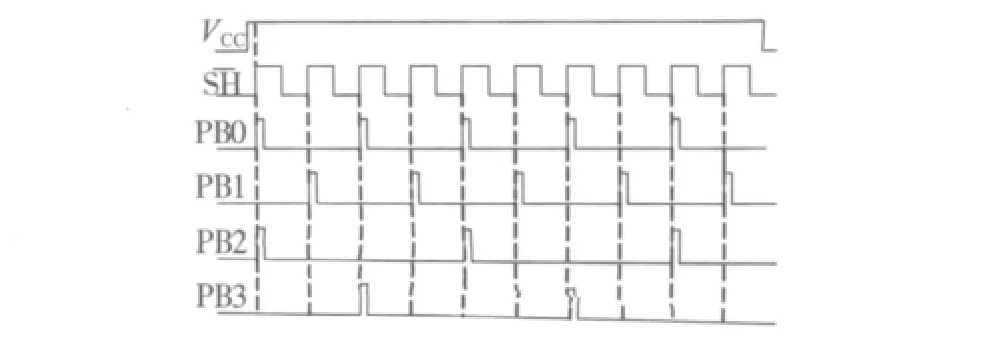
图4 单片机端口波形图
当相机工作于连拍状态时,为确保相机CCD正确记录视差图像,要求滤色片在快门信号到来前(高电平期间)转动到位。在连续脉冲的作用下,从第1个上升沿到第4个上升沿,PB3,PB2,PB1和 PB0并行输出0101,1010,1001和0110这4种状态,以后每4个重复这4种状态。该4种状态可控制红、青滤色片以不同组合覆盖立体光圈的两个子光圈,得到左红右青、左青右红互补色立体图像及左眼、右眼视差图像。
3.3 软件设计
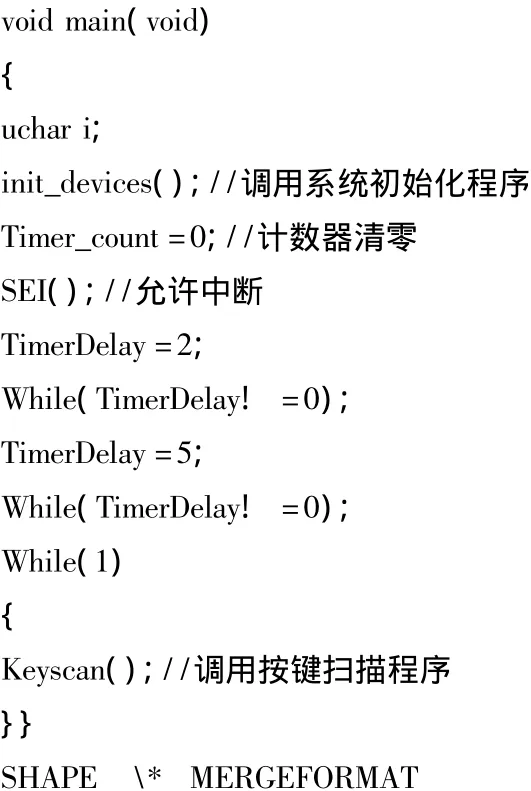
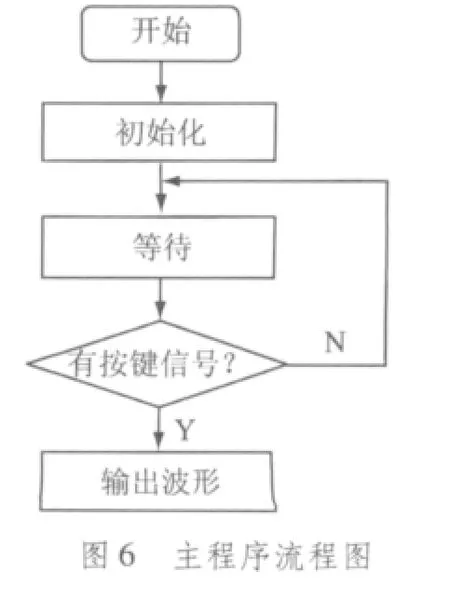
单片机的编程采用基于裸机的软件开发方式,程序采用C语言和汇编语言混合编写。单片机主程序功能模块如图5所示,包括系统初始化程序、定时器中断服务程序和按键扫描程序。主程序流程图如图6所示,单片机在系统上电后,单片机进行初始化并进入等待状态,当程序判断有快门按键操作时,程序调用相应的功能模块,从单片机相应端口输出4路控制信号。主程序如下:

4 立体图像的摄取与特点

图7 立体镜头实物图
4.1 立体图像的摄取
利用上述方案,设计制造出用于单反相机的立体镜头,实物如图7所示。
将此镜头用于单反相机,利用相机的连拍功能摄取4张图像,得到左红右青、左青右红、左眼、右眼4种图像,如图8所示。
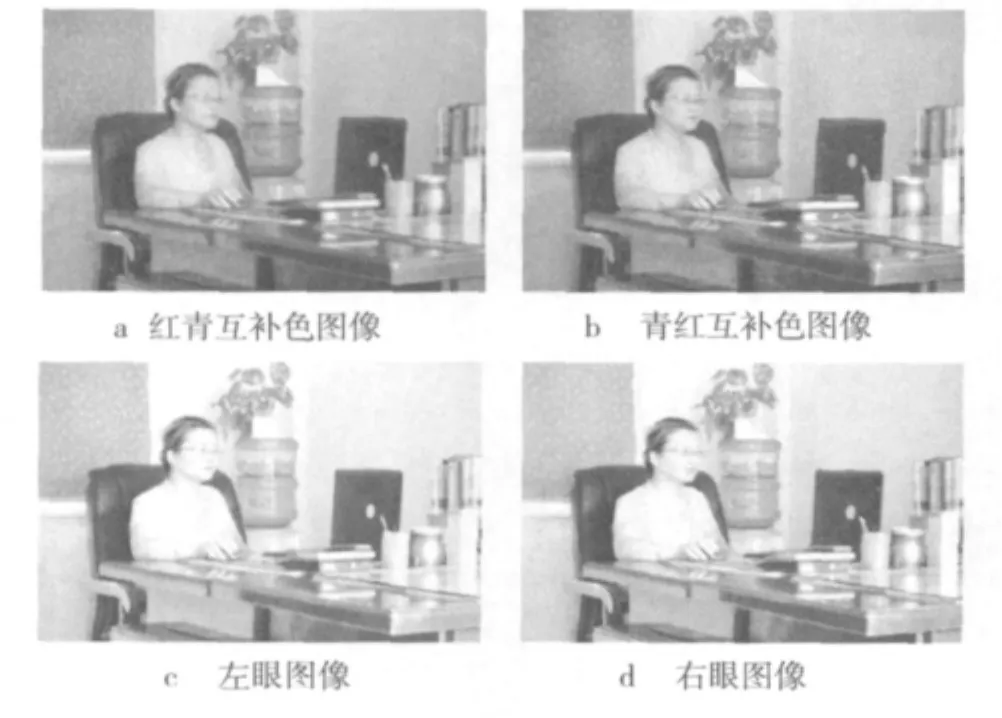
图8 立体图像效果图
4.2 立体视觉的形成
图8a和8b所示的左红右青与左青右红的图像,可以直接冲印成彩色图像或在现有彩色显示器上显示,用相应的红青互补色眼镜观看立体效果。
图8c和8d所示的左、右眼视差图像可通过柱面光栅分像形成裸眼直接观看的立体图像[5],原理如图9所示。为了提高视差图像水平分辩力,每个柱面透镜下的条状图像是宽度压缩为1/2的图像,裸眼观看时,用柱面光栅进行视差分离形成立体视觉,由于柱面透镜的放大作用,将宽度压缩后的图像条展宽,不存在传统构图方式中将左、右视差图像直接裁剪拼接而造成的图像水平分辨力下降一半的情况。因此,左、右眼看到的是水平分辨力无损失的视差图像,经大脑融合形成的立体图像质量进一步提高。
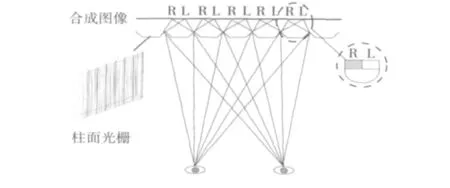
图9 柱面光栅成像示意图
4.3 立体图像的特点分析
使用该立体镜头的照相机,所摄立体图像具有以下特点[6-7]:
1)左、右眼视差图像同时在一个显示平面上显示或用立体软件合成在一个画面上的合成图像,不分离视差观看,其效果等同于直径为D的镜头聚焦形成的图像,所得画面无重影。
2)合成图像在分离视差情况下所形成的立体图像,景深为构成立体图像对的任一单眼视差图像的景深,其值远大于合成图像在不分离视差时的景深。
3)由于各视差图像焦点画面位置重合,有效解决了由于立体显示端视差分离不完全而造成的立体图像的主观质量明显下降的问题,这是任何双机立体照相所无法比拟的。实际观看时,无论视差分离是否完全,均能保证立体图像画面质量不下降。
5 小结
综上所述,利用本方案实现的立体镜头,可直接用于单反数码相机,使用时只需更换镜头就能实现平面图像与立体图像的摄取。该镜头不仅结构简单、使用方便,而且所摄立体图像能确保在主景深上无重影,具有很好的民用和商用前景,有利用立体照相技术的推广。
[1]隋婧,金伟其.双目立体视觉技术的实现及其进展[J].电子技术应用,2004(10):4-6.
[2]王清英.景深公式的推导[J].南阳师范学院学报:自然科学版,2003(3):23-24.
[3]张德忠.互补色双目立体图像摄取设备:中国,201020262567.3[P].2011-1-19.
[4]张德忠,贾正松,王志强.无重影立体电视摄像技术的研究[J].电视技术,2008,32(2):75-77.
[5]董永贵,沈立,冯冠平,等.一种基于柱透镜光栅的计算机辅助彩色立体图像合成方法[J].光学技术,1999(03):67-69.
[6]贾正松,张德忠.无重影立体图特点与应用[J].电视技术,2011,35(5):62-64.
[7]张德忠,贾正松.无重影立体电视显示技术的研究[J].电视技术,2009,33(9):35-37.
猜你喜欢
小型微型计算机系统(2022年1期)2022-01-21
成都信息工程大学学报(2021年4期)2021-11-22
小资CHIC!ELEGANCE(2021年42期)2021-11-08
小资CHIC!ELEGANCE(2021年38期)2021-10-15
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30
软件工程(2017年5期)2017-06-30
现代计算机(2016年3期)2016-09-23
西部广播电视(2015年5期)2016-01-16
数码摄影(2009年8期)2009-10-14
电影评介(2009年9期)2009-05-13
