某鱼雷空中姿态控制装置自动测试系统的设计
2011-06-13 11:19杨姗姗常塞北李兴隆
山西电子技术 2011年5期
杨姗姗,常塞北,李兴隆
(中国人民解放军第4328工厂军械装备技术研究室,山西长治 046011)
0 引言
随着现代科学技术的发展,特别是计算机技术、电子技术、信息技术的飞速发展,现代鱼雷的战术指标和作战性能得到了大幅度的提升。相应地,其空中姿态控制装置[1]的结构也变得日益复杂,系统的整体可靠性与维修性成了关键性问题,这就对测试系统提出了更高的要求。
本自动测试系统运用ISA总线技术和虚拟仪器软件开发平台 LabWindows/CVI[2],设计开发了基于 ISA 总线[3]的某鱼雷空中姿态控制装置自动测试和故障诊断系统。该系统能够完成对某鱼雷空中姿态控制装置的性能检测、故障诊断定位、维修指导等,达到系统级、部件级、板卡级三个层次的检测维修,具有智能化、高效率、易操作、测试精度高、便于扩展等优点。
1 某鱼雷空中姿态控制装置简介
为确保某鱼雷入水后的正常工作,减小鱼雷入水时的冲击载荷,避免鱼雷的仪器部件受到损伤,就必须控制该鱼雷空中下降的速度和按规定的程序、时间运行。
该鱼雷的空中姿态控制装置就是用于该鱼雷从直升机上脱离经过n秒后,形成控制其下降速度的指令以及鱼雷入水时产生控制其入水的指令。
2 总体设计
本检测设备的设计遵循以下原则,以使系统功能完善、技术先进、性能优良、使用安全、操作简单、维护方便,并具有一定动态适应性。从功能上讲,要它能够顺利完成某鱼雷空中姿态控制装置的自动测试任务,具有连续自动测试、单步测试、自检、测试结果储存、打印、显示等功能。
根据该系统的使命任务要求,“某鱼雷的空中姿态控制装置测试系统”由工控机、功能模板、检测电缆和测试与管理软件4个子系统组成。系统结构及子系统间控制与信息相互关系如图1所示。
设计思路:利用离散量输入输出板卡产生激励鱼雷空中姿态控制装置工作所需各种指令及接收其响应的输出指令信号,信号宽度由时间间隔测量模块进行测量。时序控制电路产生指令的控制时序,在该时序的作用下,产生相应的指令。
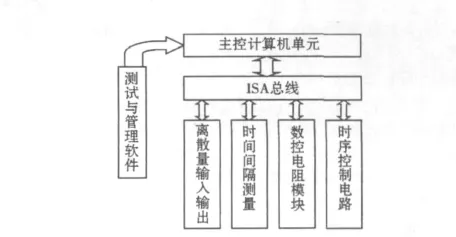
图1 总体设计方案框图
3 系统所涉及的各个子硬件功能介绍
3.1 主控计算机
主要由计算机及其外设包括显示器、鼠标键盘,及内部多功能卡等组成。作为系统控制核心,完成各个测试项目的过程控制,过程参数的实时检测,数据分析,数据库管理等功能。
3.2 电源
提供鱼雷空中姿态控制装置输入供电,通过计算机模拟量输出,经过电源控制板,控制电源输出电压,模拟测试所需的各种供电电压。
3.3 离散量输入输出
离散量接口板卡主要用来实现特征信号(开/27 V、开/地)与计算机接口之间的调理匹配。由于鱼雷空中姿态控制装置离散量接口的信号特征与标准计算机接口电平之间存在差异,因此对于这一部分信号的输入输出模拟需要借助于专门的转换电路来实现信号的匹配。
3.3.1 开/27 V 输出
开/27 V输出主要依靠继电器控制,通过计算机数据总线送出信号驱动开关管完成继电器的相关动作。
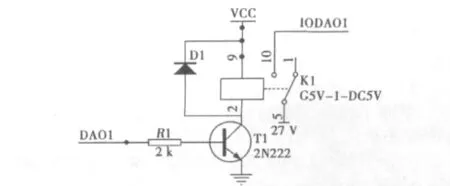
图2 开/27 V输出
3.3.2 开/地输出
开/地输出主要依靠继电器控制,通过计算机数据总线送出信号驱动开关管完成继电器的相关动作。
3.3.3 开/27 V 输入
开/27 V输入采集主要通过光耦来实现,利用光电耦合将开/27 V转换为标准的TTL电平后再送至计算机端口。

图3 开/27 V输入
3.3.4 集电极开路输入
集电极开路输入通过光耦来实现,利用光电耦合将开/27 V转换为标准的TTL电平,再锁存送至计算机端口进行数据分析。
3.4 时间间隔测量模块[4]
针对鱼雷空中姿态控制装置的复杂时序关系,专门研制了计数器/定时器板卡对其进行测量。该板卡采用16路16位计数器/定时器模块,可执行多种计数器/定时器的测量任务,包括事件计数,周期/频率测量,脉冲宽度测量,脉冲生成以及脉冲序列生成。
3.5 数控电阻模块
数控电阻模块用来模拟入水传感器电阻值,以实现入水指令的相关测试。

图4 数控电阻模块
4 测试系统软件设计
软件作为整个测试系统的重要组成部分,具有良好的人机界面,可以方便地设置测试条件、选择测试项目等信息,如果检测结果有故障,能够提供准确的故障诊断策略,并且能够记录、显示、打印测试结果。
该测试系统的软件主要由操作系统(Windows XP)、设备驱动程序、开发平台LabWindows/CVI和测试软件集组成。
LabWindows/CVI是一种高效率的开发软件,可以编译生成独立运行的测试程序。LabWindows/CVI采用C语言编程,与仪器驱动程序的语言形式相同,便于测试编程工作。LabWindows/CVI还提供了安装打包手段,可将所有测试程序及驱动软件打包成可安装型文件形式,便于用户安装使用。
测试程序在软件平台之上完成,利用软件平台提供的用户开发接口开发测试程序,而不通过设备驱动程序等低层软件对具体的仪器设备编程。软件平台驱动包括硬件接口、仪器驱动程序等与测试资源相关的所有软件驱动,完成软件平台与硬件之间接口驱动。
4.1 测试系统软件的功能
(1)提供人机交互界面。
(2)具备硬件启动,初始化自检,测试指令发出及硬件控制指令发出功能。
(3)具备对测试中产品返回的各种状态进行监测的功能。
(4)具备将读取到的测试数据进行统计计算的功能。
(5)具备将测试数据转换为可视化的图像,绘制为曲线的功能。(6)具备为用户交互层提供直观的数据结果显示功能。(7)具备对测试数据的存储,查询,报表,打印,备份等操作的功能。
4.2 测试软件流程图

图5 软件总流程图
4.3 测试系统应用
利用本测试系统对鱼雷空中姿态控制装置进行测试时,首先打开测试系统,用户登录后,系统进行自检,自检通过后,用转接电缆将测试系统与被测对象进行物理连接。然后选择测试项目,进行自动测试。当系统级测试后,判断部件出现故障时,可以选板级测试模式进行测试,通过测试可以直接定位到出现故障的单元。然后借助辅助测试工具可以直接定位到故障部件。从实际的测试效果来看,本测试系统对鱼雷控制装置能够较快完成自动测试,故障诊断覆盖率到90%以上,符合当初的设计要求。
5 结束语
测试系统采用自下而上的设计思想,设备硬件系统采用了基于ISA总线的工控机作为核心,采集、检测、控制、调理和辅助电路配置在一台机箱中,具有结构简单、技术成熟、抗干扰性能良好的优点。软件系统采用开发效率高、应用功能强大的LabWindows/CVI作为测试软件的开发工具,以目前流行的Windows XP作为开发平台。程序结构清晰,可读性强,易于功能扩展。程序的界面图形化,直观,友好。使用简单明了,易于操作,自动化程度较高。完全能够满足相关国军标和修理厂、部队测试要求。
[1]Katsuhiko Ogata.现代控制工程[M].第3版.卢伯英,译.北京:电子工业出版社,2000.
[2]宋宇峰.LabWindows/CVI逐步深入与开发实例[M].北京:机械工业出版社,2003.
[3]赵茂泰.智能仪器原理及应用[M].第2版.北京:电子工业出版社,2007.
[4]柳爱利,周绍磊.自动测试技术[M].北京:电子工业出版社,2007.
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
装备制造技术(2021年1期)2021-05-21
小哥白尼(军事科学)(2020年8期)2020-05-22
铁道通信信号(2018年8期)2018-11-10
电子制作(2018年11期)2018-08-04
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2016年3期)2016-02-27
海军航空大学学报(2015年4期)2015-02-27
声学技术(2014年1期)2014-06-21
航天器工程(2014年4期)2014-03-11