
一阶线性时滞系统的内模控制设计
2011-06-13 11:20罗霄华
山西电子技术 2011年6期
罗霄华
(太原理工大学信息工程学院,山西太原 030024)
0 引言
1982年,Garcia C E和Morari M提出具有模型、控制、反馈环节的内模控制(internal mode contro1),由于具有良好的跟踪性能和抗外扰能力,并对模型不确定性有一定的鲁棒性,内模控制自面世以来,不仅在工业过程控制中获得了成功应用,而且在控制系统稳定性和鲁棒性理论分析方面也具有一定的优势。尤其是多变量内模控制可以直接调试整个闭环系统的动态性能,并对模型误差具有良好的鲁棒性,因此,内模控制也是分析与设计多变量过程控制系统的一种重要方法。在工业过程中,简单的PID控制可以解决绝大部分的控制问题,然而对于强耦合多变量过程、强非线性过程、大惯性过程和时滞过程,常规的PID控制难以得到满意的控制效果。采用内模控制结合PID控制,比单纯采用PID控制器的控制效果好。与经典的PID控制相比,内模控制结合PID控制仅需整定一个参数,参数调整与系统的动态品质和鲁棒性的关系比较明确。
1 内模控制
1.1 原理及其结构图[1]
内模控制(Internal Model Control,简称IMC)是一种基于过程数学模型进行控制器设计的控制策略。由于其设计简单,控制性能好和在系统分析方面的优越性,因而它不仅是一种实用的先进的控制算法,而且还是研究预测控制等基于模型的控制策略的重要理论基础,以及提高常规控制系统设计水平的工具。其结构框图如图1所示。
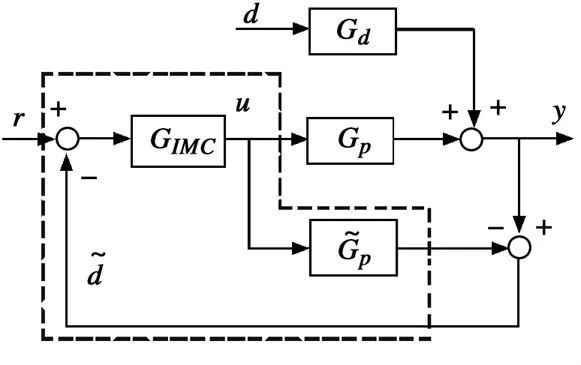
图1 内模控制框图
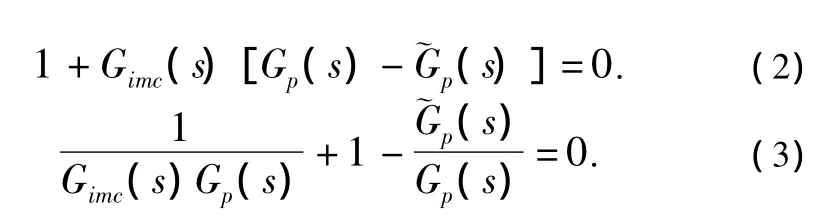
系统的特征方程为:
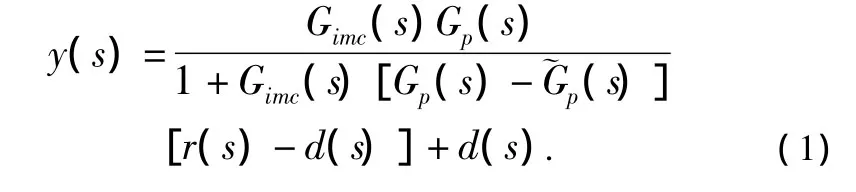
即输出可以完全复现输入。
1.2 基于内模PID鲁棒性控制器的设计[2,3]
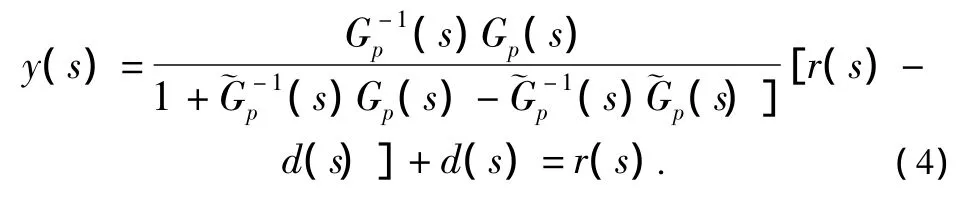
若过程Gp(s)稳定,过程模型定义准确,且当Gp(s)=),模型的逆存在时,则理想控制器的特性为[3]:

即系统可以克服任何干扰d(s),实现对参考输入的无偏差跟踪。但理想控制器的特性是在-1p(s)存在且控制器Gimc(s)可以实现的条件下得到的。由于对象中常见的时滞和惯性环节,使-1p(s)中出现纯超前和纯微分环节,因此,理想控制器是很难实现的。此外,对于具有反向特性,即包含不稳定零点的过程,-1p(s)中甚至还含有不稳定极点。另外,由于模型误差,闭环系统的鲁棒性也无法确定。
1.3 控制器的设计过程[4]
1.3.1 理想的 PID控制器
理想的PID控制器具有如下形式:

图1虚线框内等价的反馈控制器G(s)和内模控制器Gc(s)之间有如下关系:

1.3.2 控制器的设计
内模控制器可分为三步进行设计。首先,暂不考虑系统的鲁棒性和约束,设计一个定的理想控制器;其次,引入滤波器,通过调整滤波器的结构和参数来获得期望的动态品质和鲁棒性;最后,对系统的抗干扰性进行验证。
(1)过程模型G(s)的分解

(2)鲁棒性的设计
为了增加鲁棒性,在控制环节中加入一个低通滤波器F(s)。

式(9)中:λ是时间常数;γ是使G(s)控制可以实现的阶次。
从图1可以推导出:
在IMC—PID串级控制中,Gimc(s)和p(s)等都是按照内模控制原理来设计的,与单回路IMC类似,只要满足一定的条件,不管多大的模型失配,F(s)中的参数都能保证闭环系统的稳定。
(3)抗干扰性验证
与单回路控制系统相比较,由于系统在结构上多了一个副回路,所以提高了系统抑制二次干扰的能力。可用信噪比来衡量系统的抗干扰能力。
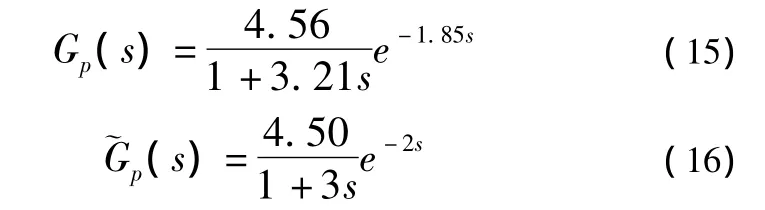
2 仿真实例
对于典型一阶滞后对象,

存在建模误差
滤波器选为:

控制器选为

当 Ko=4.56,To=3.21,τ=1.85,K=4.50,T=3.00,τ =2.00时,考虑斜坡扰动,取 a=0.85,可得
由式(8)-(16)得:

由图1所示结构框图,在SIMULINK环境下,仿真框图如图2所示。
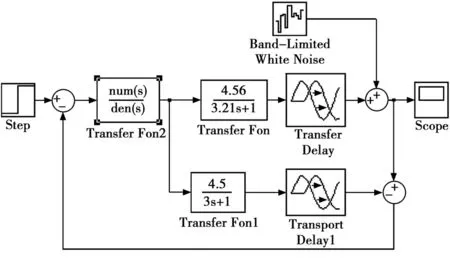
图2 simulink仿真框图
由此框图所仿真出的效果如图3所示。
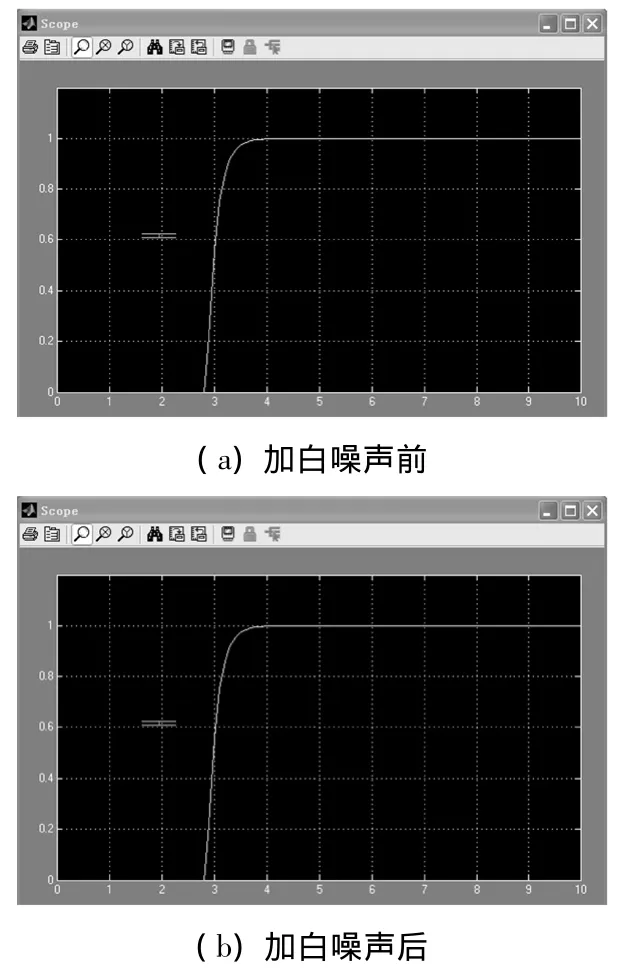
图3 仿真结果
3 仿真结论
由仿真结果图得出IMC系统能无静差地跟踪阶跃信号,此系统的设计有一定的抗干扰能力,并具有较强的鲁棒稳定性能。
[1]王树青.先进控制技术[M].北京:化学工业出版社,2001.
[2]张小娟.时滞系统的内模控制设计及仿真[J].新工艺数字技术与机械加工工艺装备,2009(11):29-31.
[3]邵惠鹤.工业过程高级控制[M].上海:上海交通大学出版社,1997.
[4]高东杰,谭杰,林红权.应用先进控制技术[M].北京:国防工业出版社,2003.
猜你喜欢
数学物理学报(2020年5期)2020-11-26
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
四川电力技术(2015年5期)2015-12-19
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年21期)2015-04-09
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
应用数学与计算数学学报(2014年3期)2014-09-26
