大坝变形GPS双基站自动监测系统设计与应用
2011-06-13 07:57:34姜晨光石伟南巩亮生闫春茹李增有
大坝与安全 2011年3期
姜晨光,石伟南,巩亮生,闫春茹,李增有
(1.江南大学环境与土木工程学院,江苏无锡 214122;2.山东省水利厅,山东济南 250013;3.山东海河流域水利管理局,山东济南 250100;4.河北中核岩土工程有限责任公司,河北石家庄 050021;5.中国兵器工业北方勘察设计研究院,河北石家庄 050021)
目前,水电站大坝的自动化监测项目主要包括变形(包括水平位移和竖直位移2个子项)、渗流(包括渗透压力和渗流量2个子项)以及应力应变等内部观测项目。自动化观测设备包括各种传感器(比如引张线、遥测垂线坐标仪、静力水准仪、弦式渗压计、渗流量仪、应力及应变传感器等)、量测控制设备(MCU)、中央控制设备、软件等。虽然目前在大坝监测自动化领域取得了很大成绩,但系统的可靠性、稳定性、有效性、针对性有待进一步加强与提高,大坝监测自动化有待于在实用化的基础上向智能化发展[1-13]。如何实现大坝监测的智能化是科研组近十年来一直在探索与实践的问题,通过研究与实践,发现GPS可以有效实现大坝监测的智能化。科研组在百丈岭水库大坝进行了相关的研究与实验工作,实验发现利用单基站GPS进行大坝自动监测效果不很理想,因此,提出了采用双基站GPS进行大坝自动监测的设想并进行了相关的实验。研究表明,双基站GPS在大坝自动监测中具有多方面的优势,是大坝自动监测的最佳方法之一。
1 工作原理
GPS定位精度高、可全天候获取信息、仪器设备轻巧、价格比较低廉,目前,GPS技术作为当代最先进的空间导航与定位技术,已经在各个专业技术领域得到广泛的应用。
GPS-RTK技术作为GPS技术的重要进展之一,具有快速、高效、实时、精确的特点,其定位速度已达2 s以内,定位精度也达到亚毫米级,若利用差分技术则其三维定位精度可达毫米级。GPS-RTK技术可实现现场作业与远端办公室的同步数据通讯。GPS-RTK技术的操作方法是:首先,必须建立或设置一个固定的GPS基站,然后在基站控制区域(一般为距基站10~20 km的圆形区域)内采用流动GPS接收机(称流动站)瞬时定位,流动GPS接收机的数量可以是一个,也可以是多个,基准站与流动站间通过数传电台进行同步联络,获得流动站每一瞬间的三维空间坐标信息。GPS-RTK监测时要求基站位置地势高、周围200 m范围内不能有GPS信号反射体和可能导致多路径效应的物体(比如:高大建筑物、大面积水域、高压线、通讯设备、微波站等)。GPS-RTK的显著优点是不要求GPS基站与GPS流动站间通视。GPS-RTK技术可借助GPRS进行数据传输,GPRS是移动通讯网络的数据传输业务,特别适合于间断性、频繁性的少量数据传输。另外,无线蓝牙通讯方式也使GPS-RTK彻底摆脱了通讯电缆的束缚,使GPS-RTK的结构得到进一步简化,操作更加简捷。
项目组开发的双基站GPS大坝自动监测系统的数据解算采用差分解算模型(DGPS模型),计算模型设计采用了基于Kalman滤波技术的三差量测算法(或叫三差扩展Kalman滤波算法)[14],算法软件可直接接收并处理来自远程监测点上GPS接收器发来的原始数据,为大坝监测提供毫米精度的变形数据。
2 组建方法
为便于叙述问题,以百丈岭水库大坝为例,见图1。百丈岭水库大坝是一座混凝土重力坝,坝长806 m,坝高97.2 m,设计库容0.36×108m3。百丈岭水库大坝双基站GPS自动监测系统包括布置在大坝坝顶的混凝土桩上的6个测点和两个GPS基准点,一个GPS基准点A位于大坝左肩的山顶上,另一个B位于大坝右肩的山顶上。这样就能很容易地给大坝上的每个测点分别建立两条独立的基线,同时也能通过解算两基准点间的基线完整地观测基准点。GPS监测的实时数据可以在位于百丈岭大坝的仪器室直接处理,也可通过局域网传输到百丈岭水库管理局办公室。
百丈岭水库的监测实践证明,天空能见度比较高时,GPS实时观测得到的各测点的三维坐标精度可优于6.5 mm(水平观测和垂直观测的精度大约在3~5 mm之间,24 h时段观测精度能达到1~2 mm)。将GPS观测数据与通过其它技术(包括铅垂线和裂缝计)观测得到的数据进行比较,其表现出了很好的吻合性。借助A、B两个GPS基准点能对大坝上的每个测点使用两套独立的方法进行计算。由于GPS的精度是绝对的,所以这两个独立的测量结果能不断与系统标准精度进行比照,从而提供完整的序列化观测数据。大坝上每个测点两个独立过程之间的误差很小,两个独立方案之间的差别可提醒操作人员找出偏差的原因并及时进行纠正。

图1 百丈岭水库大坝双基站GPS自动监测系统布置Fig.1 Distribution of the double basis stations GPS automaticmonitoring system at Baizhangling reservoir
百丈岭大坝监测证明,两个基准点的计算成果在GPS允许的误差范围内且彼此吻合得非常好。为确保长期观测的精度,GPS监测系统基准点必须有稳定的参照标石并确保观测连续进行,这样,当大坝可能发生位移时,基准点的精确测量结果须能够做出正确的判断。
3 监测效果
对百丈岭水库大坝双基站GPS自动监测系统制定了三个指标评价体系,分别是系统错误分析、重复数据分析和计算结果精度分析。
系统错误分析采用2σ准则作为判断依据,大量监测数据显示,相对于同一基准点,7 d三维变形平均值与24 h三维变形平均值的差值中误差为σ=±2.73 mm(其中,水平变形中误差为±1.16 mm、竖向变形中误差为±2.47 mm)。不同基准点的三维变形差值(即2个GPS基准点间的系统误差,或称固定性差值)或基准点与垂线仪间的系统误差(也为固定性差值)大致为恒量,系统构建时就存在,中误差σ=±1.96 mm(其中,水平变形差值中误差为±0.93 mm、竖向变形差值中误差为±1.73 mm),当监测结果超过2σ即系统出现错误(系统软件会自动给出提示并报警),此时应查找原因予以解决。监测实践表明超差几乎都由观测环境变差引起(比如太阳黑子活动性增强、磁暴、地球摄动幅度急变等)。
重复数据分析以瞬时三维变形观测值与24 h三维变形平均值的差值τ作为判断依据,当│τ│≥5.46 mm时即认为系统出现错误(系统软件也会自动给出提示并报警),此时也应查找原因予以解决。监测实践表明超差几乎也都由观测环境变差引起(比如太阳黑子活动性增强、磁暴、地球摄动幅度急变等),大量监测数据显示│τ│<5.59 mm。
计算结果精度分析借助最小二乘原理由系统软件自动完成,计算公式为:

式中,V为改正数,n为观测次数,V=Xi-X,Xi为观测值、x为平均值。
图2~4显示了测点3的DGPS数据和垂线仪观测数据,曲线正值表示大坝向上游变形、负值表示大坝向下游变形。图中显示的是2年的观测数据,这些图清晰地显示DGPS数据和垂线仪观测数据的变化非常接近。从图2~4可以看出,测点3的DGPS数据和垂线仪观测数据间有明显的偏差(经分析,偏差的原因是两个系统安装时间不同,因而得到了不同的初始数据)。图2和图3分别显示了测点3垂线和A基准点、B基准点获得的DGPS坝体变形数据的对比情况,垂线观测数据显示为实线、DGPS数据为虚线。垂线仪每天自动读取一次数据,而DGPS则每5 s计算一次变形数据,所有5 s的DGPS观测数据24 h平均值见图2中的虚线,7 d的平均值用点划线表示。图4显示A、B基准点(参考站)以及垂线仪获得的大坝变形监测数据。从图中不难得出A、B两个独立GPS参考站DGPS数据完全一致的结论,因此,若大坝内没安装垂线仪,DGPS网络至少需要布设两个GPS参考站(即A、B双基站)。图5显示的是测点3的垂线、DGPS(基于A基站)和DGPS(基于B基站)的变形监测数据间的差值变化,其大致以10 mm为数轴呈微小波动,10 mm为DGPS与垂线仪的初值偏差(产生的原因是DGPS与垂线仪是在不同时期安装的,10 mm类似于初相位)。图6显示的是两个DGPS参考站(A、B基站)之间的相对变形,从图中可以看出基于A基站的DGPS数据与基于B基站的DGPS数据在2年内差值很小,这说明该地区地层很稳定。图2~6仅仅显示了第3号监测点的平面变形情况,图7显示的是第3号监测点的竖向变形情况,实线代表A参考站的DGPS数据,虚线代表B参考站的DGPS数据。百丈岭水库大坝的竖向变形从安装了DGPS系统开始观测,通过这些数据可揭示该大坝坝顶每年的沉降情况。
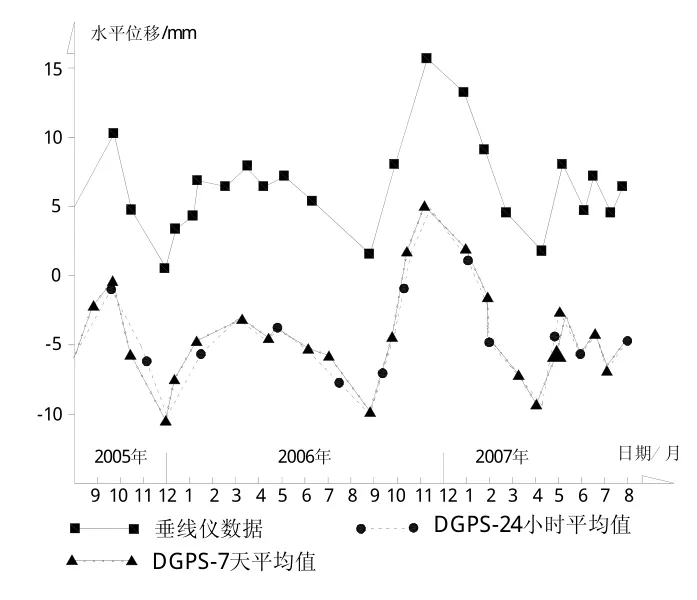
图2 测点3的垂线和DGPS(通过A基准点获得)变形监测数据Fig.2 Monitored deformation data by plumb-line and DGPS(by basis point A)at the monitoring point No.3

图3 测点3的垂线和DGPS(通过B基准点获得)变形监测数据Fig.3 Monitored deformation data by plumb-line and DGPS(by basis point B)at the monitoring point No.3

图4 测点3的垂线、DGPS(基于A基站)和DGPS(基于B基站)的变形监测数据对比Fig.4 Comparison of deformation data by plumb-line and DGPS(by basis points A and B)at the monitoring point No.3

图5 测点3的垂线、DGPS(基于A基站)和DGPS(基于B基站)的变形监测数据间的差值变化Fig.5 Difference of deformation data by plumb-line and DGPS(by basis points A and B)at monitoring point No.3
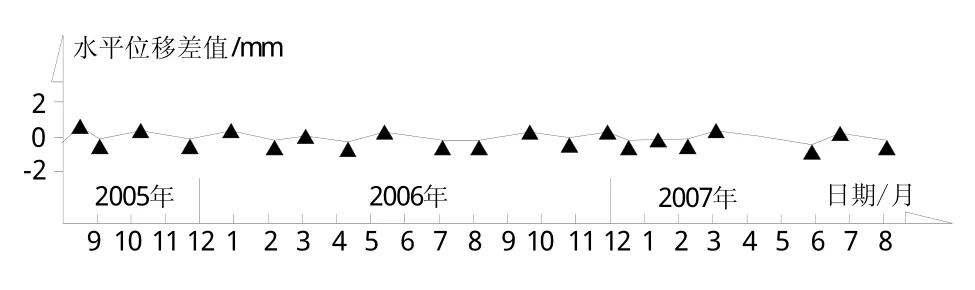
图6 测点3DGPS(基于A基站)和DGPS(基于B基站)之间的相对变形数据Fig.6 Relative deformation data monitored by DGPS(by basis points A and B)at the monitoring point No.3

图7 测点3的DGPS(基于A基站)和DGPS(基于B基站)竖向变形监测数据对比Fig.7 Comparison of monitored vertical deformation data by DGPS(by basis points A and B)at the monitoring point No.3
4 结 语
在百丈岭水库大坝安装的6个GPS测点中,有3个安装在原来大坝中布设的垂线坐标仪旁边,以便和垂线坐标仪的观测结果进行比对。GPS和垂线坐标仪的组合配置不仅可比较两种测量系统的结果,还可使GPS数据成为垂线坐标仪系统的工作基准。从本文图2~7不难看出,在百丈岭水库大坝顶部的水平位移测量中,GPS和垂线坐标仪的测量结果具有很好的一致性。在百丈岭水库大坝布置两个GPS参考站,使整个系统对每一个遥测站点在任何时间都具有两个独立运行的解决方案,借助实时监测计算获得的基于两个独立参考站的监测数据间的一致性可立即确定整个系统的精度及准确度。双基站GPS大坝自动监测系统将Kalman滤波技术、三差量测技术组合应用,使大坝全天候(24 h)时段的三维变形观测精度得到很大提高(竖向变形测量精度优于3 mm)。在变形监测中,垂线测量系统只能监测大坝在平面上的变形,而GPS系统则可以同时监测大坝在铅直方向(竖向)和水平方向的变形。
[1]董占坤.TCA测量机器人在寒冷地区大坝变形监测中的应用[J].水电自动化与大坝监测,2003,27(4):43~44.
[2]李珍照.大坝安全监测[M].北京:中国电力出版社,1997.
[3]DL/T5178-2003,混凝土坝安全监测技术规范[S].
[4]李征航,刘志赵,王泽民.利用GPS定位技术进行大坝变形观测的研究[J].武汉水利电力大学学报,1996,29(6):26~29.
[5]张小红,李征航,李振洪.隔河岩大坝外观变形GPS自动化监测系统的灵敏度分析[J].测绘通报,2000(11):10~12.
[6]沈海尧,王玉洁,吕永宁.水电站大坝监测自动化的现状与展望[J].浙江水利科技,2004(2):23~25.
[7]闫生存,胡颖,孙役,等.水布垭高面板堆石坝监测新技术探讨[J].湖北水力发电,2004(4):34~36.
[8]喻兴旺,程鸣坚,徐忠阳,等.TCA2003全站仪在港口湾水库大坝变形监测中的应用[J].水电自动化与大坝监测,2003,27(5):48~50.
[9]张兵.洞坪水电站大坝监测自动化设计[J].湖北水力发电,2004(4):31~33.
[10]赵景瞻.TCA2003全站仪及其在二滩大坝外部变形监测中的应用[J].水电自动化与大坝监测,2002,26(2):34~38.
[11]邹海,姜建国,李朝峰,等.基于串口通讯的分布式大坝监测自动测控系统[J].工业控制计算机,2003,16(2):23~24.
[12]David Bennett著,徐军译.Visual C++开发人员指南[M].北京:机械工业出版社,1998.
[13]Jiang Chenguang,Jiang Zhongping,Wang Jiming,and etc.Contributions of the Safety Surveying on the Dam of Hydropow-er Station to the Sustainable Development of the Economy in the Dam Area[A].The Proceedings of the United Nations Sympo-sium on Hydropower and Sustainable Development,2004.
[14]Benjamin W.Remondi,Grover Brown.Triple Differencing with Kalman Filtering:Making It Work[J].GPS Solutions,2000,3(3):58~64.
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
新世纪智能(教师)(2021年2期)2021-11-05 08:43:18
小学生学习指导(中年级)(2021年10期)2021-11-01 08:17:08
海洋通报(2021年2期)2021-07-22 07:55:26
现代测绘(2021年1期)2021-04-28 10:19:56
百科知识(2018年6期)2018-04-03 15:43:54
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:49:11
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:48:12
水道港口(2014年1期)2014-04-27 14:14:35
中国三峡(2013年11期)2013-11-21 10:39:18